

1. 運行過程中的dv/dt特性分析
(1)波形邊沿疊加特性
驅動器類IGBT控制方式,特別是變頻器類,有無PG V/f 控制、帶PG V/f控制、無PG矢量控制、帶PG矢量控制等等不同的控制方式和術語描述,總結來說為三大類:VF、開環矢量、閉環矢量控制。不同的控制方式發波方式會有所差別。
同時抓取上橋T1、T3、T5的Vce波形,來綜合說明驅動器運行過程中的Vce的發波模式。
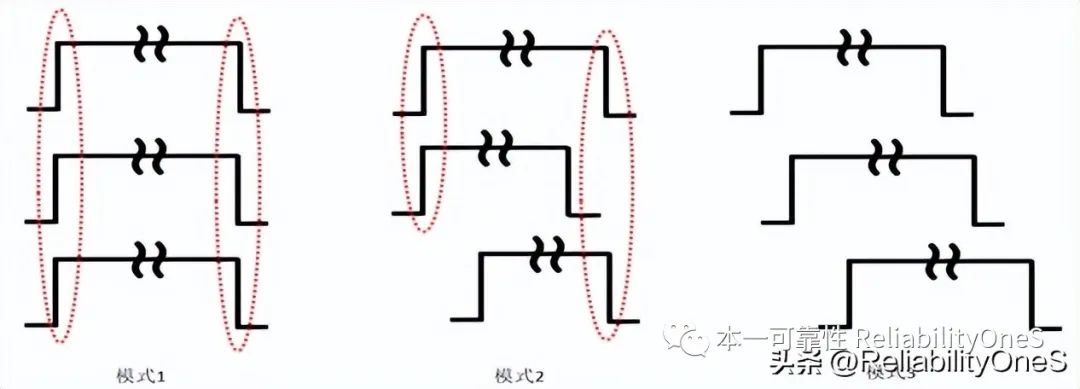
發波模式示意圖
- 模式1:剛啟動或0HZ運行時,三個管子的邊沿(上升沿或下降沿)重疊在一起;
- 模式2:隨著運行頻率的增加,三個管子波形逐漸錯開,兩個管子的邊沿(上升沿或下降沿)重疊在一起;
- 模式3:速度穩定時,三個管子邊沿交錯開,無疊加出現;
- VF模式控制:模式1和模式2;
- 其他模式控制:模式2和模式3;
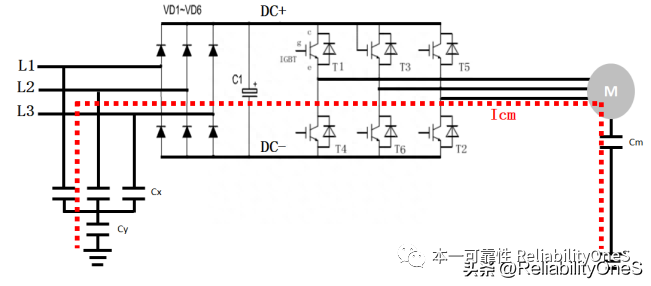
(2)干擾影響分析
- 干擾電流峰值:把單管噪聲電流記為Icm=C回路dV/dt,所以,模式1峰值干擾電流相當為3Icm、模式2峰值干擾電流為2Icm、模式3峰值干擾電流相當為1Icm。
(3)干擾強度比較
因工作在模式1和模式2,所以VF控制下的噪聲量級比其他控制方式下的更強,特別是0HZ或低頻運行時。
(4)同一驅動參數下dv/dt隨輸出電流變化的特性
turn on (下降沿)與turn off(上升沿)的dv/dt的特性總結如下:
- 上升沿與下降沿在電流過零點處的dv/dt最大;
- 上升沿的dv/dt在電流正半周比在負半周大;
- 上升沿的dv/dt在電流正半周內隨電流的增大逐漸變小,電流最大時dv/dt最小;
- 下降沿的dv/dt在電流負半周比在正半周大;
- 下降沿的dv/dt在電流負半周內隨電流絕對值變大逐漸變小,電流絕對值最大時dv/dt最小;
- 上升沿的dv/dt在電流負半周期內隨電流絕對值變大而變大;
- 下降沿的dv/dt在電流正半周期內隨電流變大而變大;
2. IGBT Vce噪聲源抑制方法
經過以上分析,有以下四種抑制方法:
- 0HZ或低頻不發波,或啟動頻率提高(如1HZ以上才發波);
- 降低五段發波與七段發波的運行切換點,降低有效發波次數;
- Vce邊沿交錯控制最小化dv/dt,使得干擾電流峰值最低,同時對損耗沒有影響;
- Vce邊沿變緩設計;
- 固定參數設計----應用較多,一般負載越重開關損耗越大,與EMI互為矛盾點,需要權衡;
- dv/dt在線調整控制,最優化EMI與損耗的折中設計;
3. Vce邊沿交錯控制
邊沿交錯控制的本質是增大各個管子開通關斷的時間間隔,使得各個電壓波形邊沿不重疊,降低dv/dt,從而減小干擾。
(1)設計點
改變死區時間來完成邊沿交錯的控制,但要注意時間不宜過大,一般錯開共模電流第一個波峰寬度就可以了。
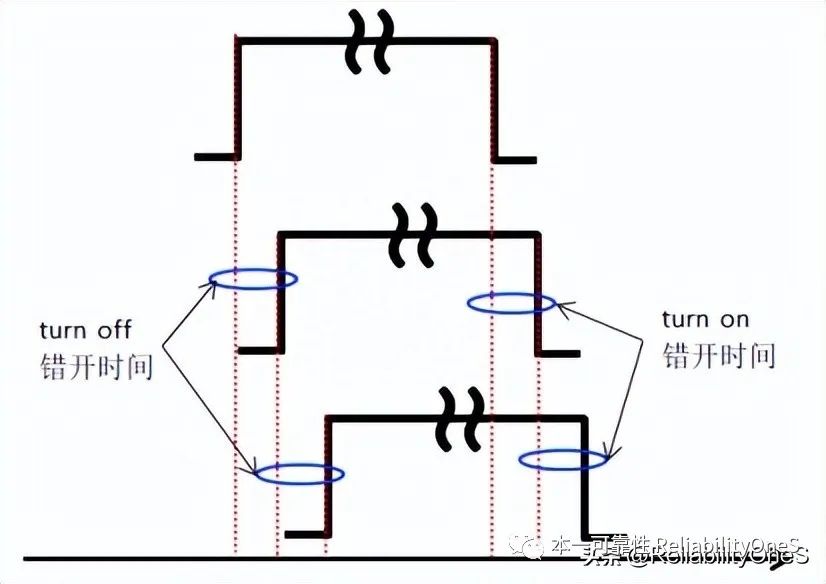
邊沿交錯控制示意圖
(2)負面影響
因死區時間的調節控制,可能帶來驅動器輸出電流的非正弦化,需要額外的手段進行正弦化的處理。
(3)應用場合
特定場合。
4. dv/dt在線調整控制
因電機負載的電感特性,使得IGBT開關動作時,電流不會立即降為零,需要等到CE兩級的載流子逐漸消失后,才能徹底的關斷,電感中的電流變化影響著IGBT的turn on與turn off時間。線調整控制的本質是找到dv/dt與輸出電流的周期性變化規律,從而設計出適合的驅動參數,使得EMI與損耗最優化。實際測試中也發現dv/dt與驅動參數及輸出電流大小等因素相關。
- 驅動器不接電機,dv/dt測量很穩定,在不同運行頻率下測得的結果都一樣;
- 驅動器接電機(空載與加載),dv/dt隨電流的變化而變化。在相同的IGBT的g極驅動參數下,電流越大dv/dt越小;
(1) 設計點
由變化過程中過零點為dv/dt最大點,保證過零點dv/dt滿足EMI要求,再根據輸出不同電流動態調整dv/dt,使得趨近于過零點的dv/dt。其驅動控制電路示意圖參見圖16,dv/dt的驅動參數設計方向參見圖17。
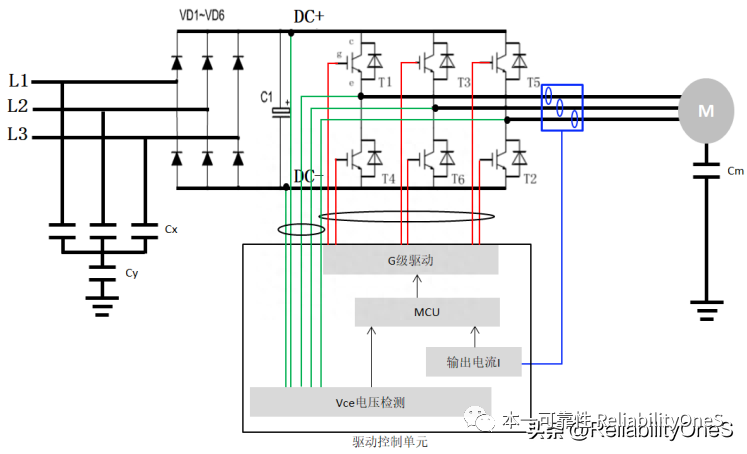
圖16 驅動控制電路示意圖

圖17 dv/dt設計方向-上升沿dv/dt設計
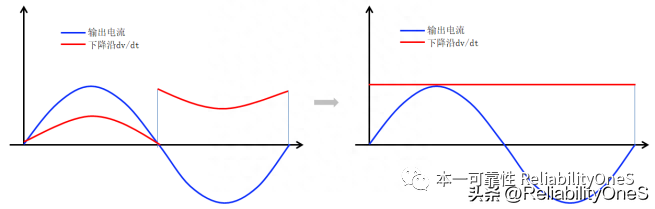
圖17 dv/dt設計方向-下降沿dv/dt設計
(2)dv/dt在線調整控制的優點
- dv/dt在整個周期內為滿足EMI需求的最大值,大大減小了開關損耗,最優化EMI與損耗的設計;
- 不需要在IGBT的E級上串電感,而引發的諧振風險;
(3)G級驅動部分,有以下兩種實現方法
- 采用不同的驅動參數組合;
- 采用柵極電流控制芯片;
(4) 負面影響
增加控制電路與電流檢測電路,成本增加,控制稍復雜;
(5) 應用場合
通用。
5. 應用案例調查
-
驅動器
+關注
關注
54文章
8476瀏覽量
148511 -
變頻器
+關注
關注
253文章
6757瀏覽量
147853 -
IGBT
+關注
關注
1276文章
3926瀏覽量
252558 -
PWM控制器
+關注
關注
18文章
557瀏覽量
36724 -
EMI設計
+關注
關注
0文章
44瀏覽量
10624
發布評論請先 登錄
相關推薦
IGBT在半橋式電機控制中的使用
增強型PWM抑制功能對于直列式電機控制的五大優勢
直列式電機電流感應增強型PWM抑制的五大優勢
采用離散FET設計的EMI抑制技術
從安全工作區探討IGBT的失效機理

基于脈寬調制PWM控制抑制可調光LED EMI的方法

IGBT的失效模式與失效機理分析探討及功率模塊技術現狀未來展望






 工商網監
工商網監

評論