 CAN通信針腳定義 can通信和串口通信區別在哪
CAN通信針腳定義 can通信和串口通信區別在哪
can線怎么工作
CAN線是用于CAN(Controller Area Network)通信的物理傳輸介質,它是一對差分信號線,通常使用雙絞線來傳輸數據。CAN線的工作原理如下:
1. 差分信號傳輸:CAN線上的兩根線分別是CAN_H和CAN_L,它們攜帶著差分信號。CAN_H線上的電壓值高于CAN_L線時,表示傳輸的是高電平信號;CAN_H線上的電壓值低于CAN_L線時,表示傳輸的是低電平信號。通過這種差分傳輸方式,CAN線具備了較強的抗干擾能力,可以有效地減少信號傳輸過程中的電磁干擾和噪聲干擾。
2. 幀結構:CAN通信采用基于幀的數據傳輸方式。數據以數據幀的形式進行傳輸,一個CAN數據幀包含了以下幾個重要字段:
- 標識符(Identifier):用于在總線上對不同的數據幀進行識別和區分。
- 控制位(Control Bits):用于指示數據幀的類型,例如數據幀、遠程幀等。
- 數據字段(Data Field):用于存放實際的數據信息。
- 校驗字段(Cyclic Redundancy Check,CRC):用于檢驗數據傳輸的正確性。
- 幀結束位(End of Frame,EOF):表示一個數據幀的結束。
3. 總線訪問控制:CAN線采用CSMA/CR(Carrier Sense Multiple Access with Collision Resolution)的訪問控制方式。當一個節點要發送數據時,它會先監聽總線上是否有其他節點正在發送數據。如果沒有正在發送數據的節點,該節點可以直接發送數據。如果有節點正在發送數據,那么該節點會等待一段時間,然后再嘗試發送數據,以避免數據沖突。
4. 錯誤檢測和恢復:CAN線的通信協議內置了豐富的錯誤檢測和恢復機制。每個節點在發送數據時,都會對發送的數據進行CRC校驗,接收節點在接收數據時也會進行CRC校驗。如果校驗發現錯誤,接收節點可以通過發送錯誤幀來通知發送節點重發數據。
CAN線通過差分信號傳輸、幀結構、總線訪問控制和錯誤檢測機制來實現高效可靠的數據傳輸,并具備較強的抗干擾能力和錯誤糾正能力,因此在汽車網絡和工業控制等領域得到廣泛應用。
CAN通信針腳定義
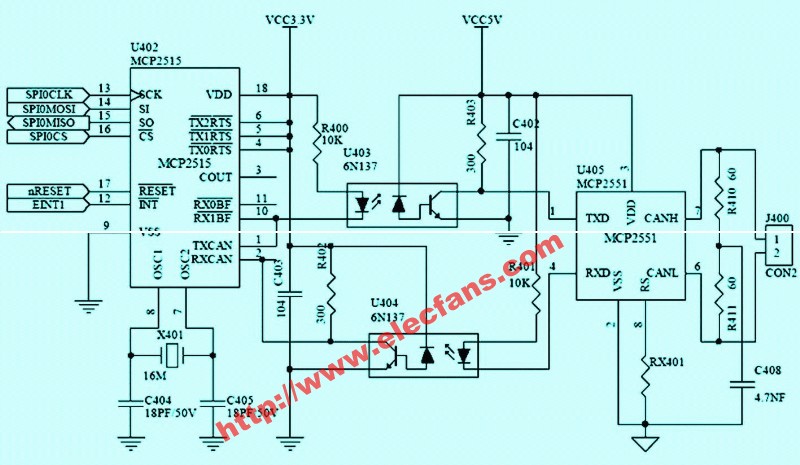
CAN通信是一種常用于車輛和工業控制系統中的數據通信協議。CAN總線接口定義了一組針腳,用于連接CAN控制器和其他CAN設備。在標準的CAN總線接口中,通常有以下幾個主要的針腳定義:
1. CAN-High (CAN_H):用于傳輸CAN高電平信號的引腳。它是CAN總線中傳輸數據的正極極性線。
2. CAN-Low (CAN_L):用于傳輸CAN低電平信號的引腳。它是CAN總線中傳輸數據的負極極性線。
3. CAN Ground (CAN_GND):用于連接CAN系統的地線。它提供了系統的參考地。
4. CAN V+ (CAN_V+):用于連接CAN系統的正電源引腳。它提供了供電電壓。
5. CAN V- (CAN_V-):用于連接CAN系統的負電源引腳,通常是接地。它提供了供電電壓的返回路徑。
這些針腳定義可以略有不同,具體取決于使用的CAN總線硬件和標準。在實際應用中,還可能包含其他引腳,如終端電阻(Termination Resistor)、錯誤信號線等。因此,在使用CAN總線時,應根據具體的硬件和標準規范來確定針腳定義和使用方式。
can通信和串口通信區別在哪
CAN通信和串口通信是兩種不同的數據通信方式,它們在以下幾個方面有所區別:
1. 物理層接口:CAN通信使用差分信號線,通常采用雙絞線傳輸數據,具有抗干擾能力較強。而串口通信使用單根信號線,通常是異步串口通信,使用單根信號線傳輸數據和控制信息。
2. 傳輸速率:CAN通信的傳輸速率較高,可以達到幾百 Kbps 或更高,適用于高速數據通信,例如汽車網絡和工業控制系統。而串口通信的傳輸速率一般較低,通常在幾百 bps 到幾百 Kbps 范圍內。
3. 數據幀結構:CAN通信使用基于幀的數據傳輸方式,數據以數據幀的形式傳輸,包括標識符、數據和校驗字段。而串口通信通常以字節為單位進行傳輸,沒有特定的幀結構。
4. 多點通信:CAN通信支持多點通信,可以連接多個CAN節點組成網絡。每個節點在總線上通過標識符來區分和識別數據幀。而串口通信通常是點對點的通信方式,只能連接兩個設備。
5. 報錯檢測:CAN通信具有較強的錯誤檢測和糾正能力,能夠自動檢測和糾正傳輸過程中的錯誤,并提供錯誤狀態的反饋。串口通信一般沒有類似的自動錯誤檢測和糾正機制。
總體而言,CAN通信適用于高速、多節點、抗干擾要求較高的應用場景,例如汽車網絡和工業控制系統。而串口通信適用于簡單的點對點數據傳輸,通常用于連接計算機與外部設備、傳感器、模塊等。選擇適合的通信方式應根據具體的需求和應用場景來決定。
編輯:黃飛
-
CAN
+關注
關注
57文章
2756瀏覽量
463765 -
電磁干擾
+關注
關注
36文章
2316瀏覽量
105447 -
串口
+關注
關注
14文章
1555瀏覽量
76555 -
串口通信
+關注
關注
34文章
1626瀏覽量
55545 -
差分信號
+關注
關注
3文章
378瀏覽量
27699
發布評論請先 登錄
相關推薦
什么是CAN通信矩陣 如何理解CAN通信矩陣
CAN通信和串口通信
藍牙通信、串口通信、和can通信以及MCU之間的關系

【分享】什么是串口通信?串口常見通信問題如何解決?

can通信與uart通信的區別 CAN相比UART難嗎
can通信與uart通信的難度區別





 工商網監
工商網監
評論