") AI提高自動駕駛夜視能力,檢測黑夜、霧天場景和白天一樣
AI提高自動駕駛夜視能力,檢測黑夜、霧天場景和白天一樣
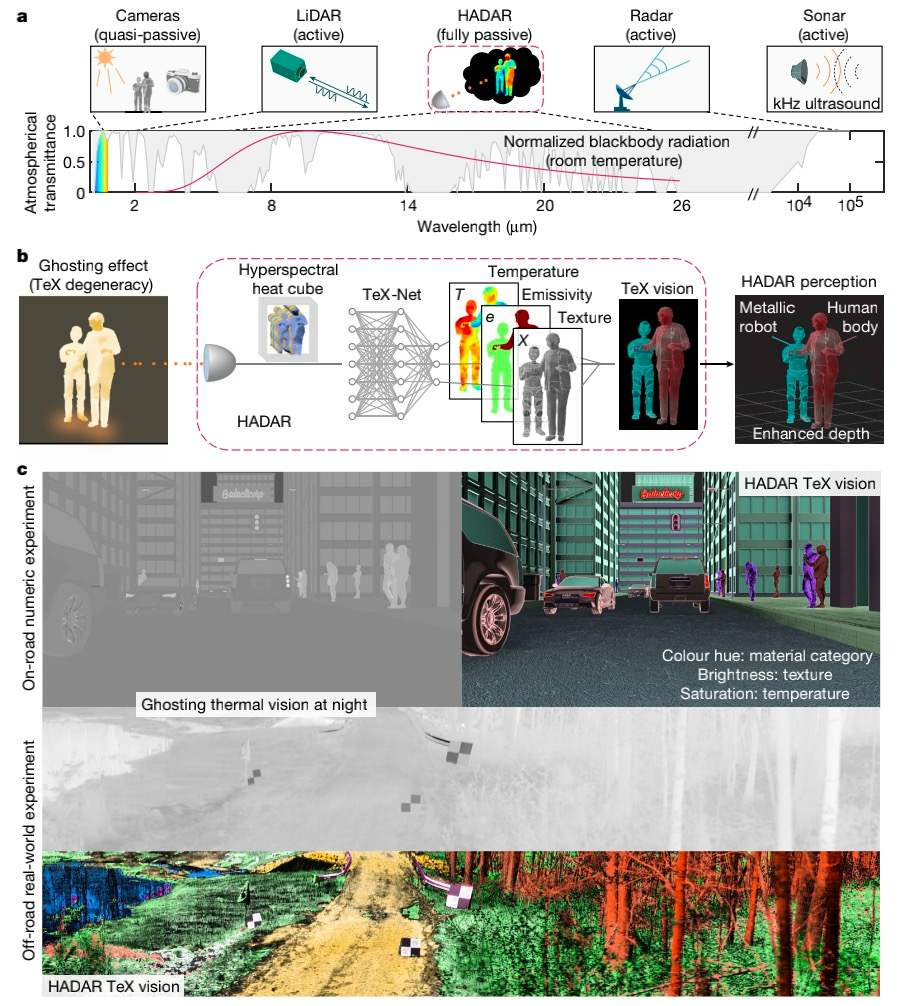
環(huán)境感知是自動駕駛領(lǐng)域非常重要的一項(xiàng)任務(wù)。特別是在夜晚或者極端天氣的情況下,現(xiàn)有的視覺感知和激光雷達(dá)兩種方式對環(huán)境的感知和識別都效果不佳。這給自動駕駛等高風(fēng)險(xiǎn)應(yīng)用帶來了挑戰(zhàn)。 有些研究提出使用熱像儀來彌補(bǔ) LiDAR 和視覺攝像頭的缺陷。但由于物體不斷發(fā)出熱輻射,粒子會擴(kuò)散到附近的環(huán)境中,導(dǎo)致熱成像變得模糊、無紋理,形成「鬼影(ghost)」,使這種方法難以實(shí)際應(yīng)用。 現(xiàn)在,一種新的熱成像技術(shù)可以不受霧、煙和黑暗等視覺障礙的影響,使得自動駕駛汽車在黑暗中也能準(zhǔn)確感知環(huán)境。如下圖所示,與以前的熱成像(上)相比,新方法可以創(chuàng)建更清晰、更有質(zhì)感的夜間圖像(中和下)。
這種新方法是由來自普渡大學(xué)等機(jī)構(gòu)的研究者提出,他們開發(fā)了一種新的系統(tǒng), 稱為「熱輔助探測和測距系統(tǒng)(HADAR)」。借助該系統(tǒng),我們可以在環(huán)境不佳的情況下獲得精細(xì)的環(huán)境圖像,細(xì)節(jié)與精度和傳統(tǒng)相機(jī)在明亮日光下拍攝的圖像相當(dāng)。研究論文已登上 Nature 封面。
論文地址:https://www.nature.com/articles/s41586-023-06174-6 方法介紹 HADAR 能夠穿透光學(xué)雜波來檢測物體的溫度、材料成分和熱輻射模式,而不受霧、煙和黑暗等視覺障礙的影響。因此,無論一天中的時(shí)間或環(huán)境如何,HADAR 基于對深度和紋理的渲染都能創(chuàng)建極其詳細(xì)、清晰的圖像。
HADAR 與「鬼影」熱成像。 為了訓(xùn)練 HADAR 系統(tǒng),研究人員在夜間使用先進(jìn)的熱成像相機(jī)和能夠顯示電磁波譜中能量輻射的成像傳感器,在戶外捕獲數(shù)據(jù)。他們還創(chuàng)建了對戶外環(huán)境的計(jì)算機(jī)模擬,以便進(jìn)行額外的 AI 訓(xùn)練。 普渡大學(xué)電氣與計(jì)算機(jī)工程系教授、本文作者之一 Zubin Jacob 表示,「HADAR 學(xué)會了探測物體并估計(jì)與這些物體的距離,其精度是僅依靠傳統(tǒng)夜視技術(shù)的 10 倍。而且,HADAR 在夜間的性能與傳統(tǒng)物體檢測系統(tǒng)在白天的性能相當(dāng)。」 「聲納、雷達(dá)和激光雷達(dá)等會發(fā)出信號并返回反射,以推斷物體是否存在及其與物體的距離。除了相機(jī)所擁有的視覺能力之外,它們還提供了場景的額外信息,尤其是在環(huán)境照明較差的情況下,」Jacob 表示,「然而,HADAR 有著根本的不同,它利用不可見的紅外輻射來重建夜間場景,清晰度就像白天一樣。」 在沒有反射光的黑暗環(huán)境中, 傳統(tǒng)攝像頭無法很好地捕捉圖像,雷達(dá)和激光雷達(dá)也容易受到干擾。 熱成像技術(shù)通過捕獲環(huán)境中物體輻射的紅外光來重建場景。如下圖所示,新研究提出的 HADAR 方法改變了機(jī)器感知的方式:
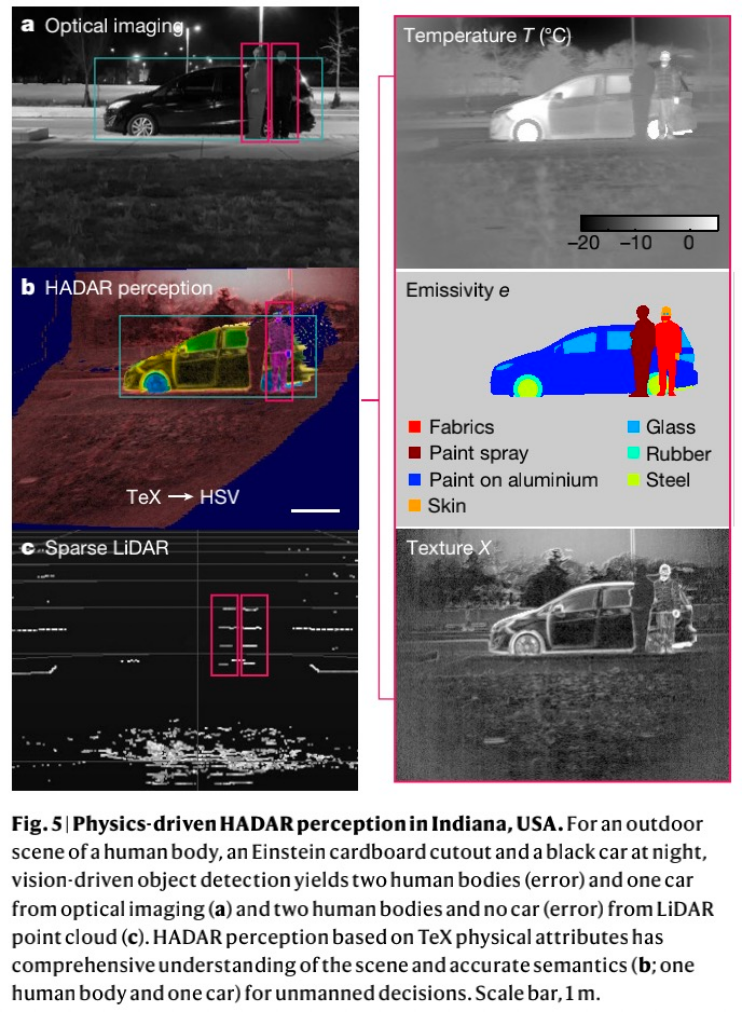
 下圖展示了一個(gè) HADAR 的應(yīng)用實(shí)例。其中有一位真人和一個(gè)人形紙板。RGB 光學(xué)成像和稀疏 LiDAR 點(diǎn)云都無法區(qū)分真人和人形紙板,并且 LiDAR 還難以檢測到夜間條件下的車輛。而 HADAR 檢測到相應(yīng)材料區(qū)域(皮膚?+?織物)中的人,將其與紙板清楚地區(qū)分開來,克服了「幻象制動」問題。
下圖展示了一個(gè) HADAR 的應(yīng)用實(shí)例。其中有一位真人和一個(gè)人形紙板。RGB 光學(xué)成像和稀疏 LiDAR 點(diǎn)云都無法區(qū)分真人和人形紙板,并且 LiDAR 還難以檢測到夜間條件下的車輛。而 HADAR 檢測到相應(yīng)材料區(qū)域(皮膚?+?織物)中的人,將其與紙板清楚地區(qū)分開來,克服了「幻象制動」問題。
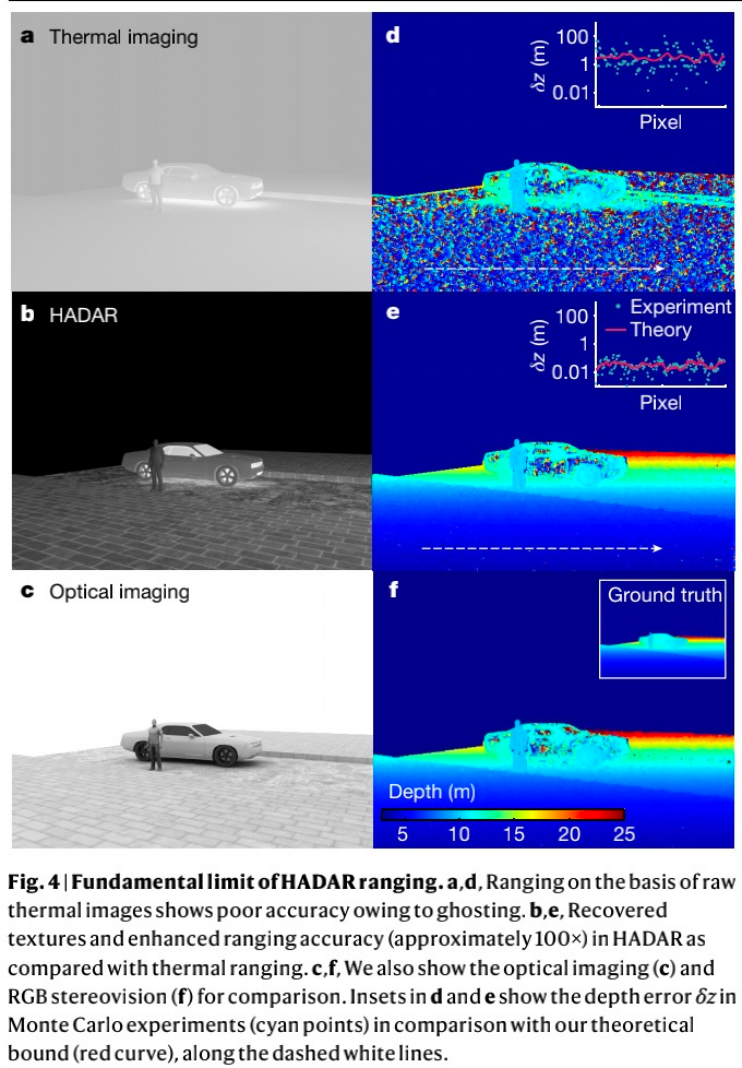
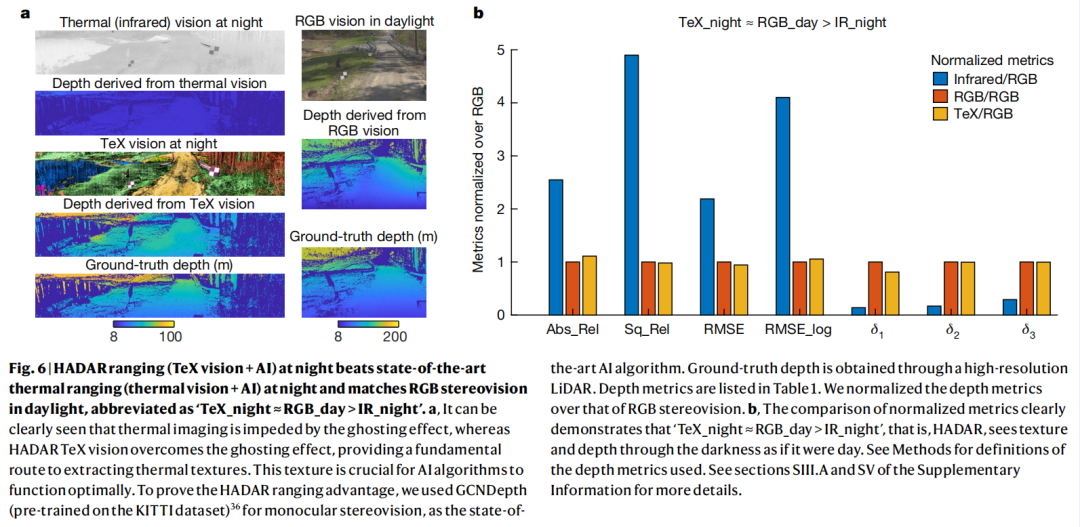
 ?下圖 6 展示了 HADAR 測距在夜間擊敗了最先進(jìn)的熱測距技術(shù):
?下圖 6 展示了 HADAR 測距在夜間擊敗了最先進(jìn)的熱測距技術(shù):
 由于該方法能夠確定場景中的物體是由什么組成的,因此與傳統(tǒng)成像技術(shù)相結(jié)合,即使在白天,HADAR 也可以提供有關(guān)場景的獨(dú)特信息。
由于該方法能夠確定場景中的物體是由什么組成的,因此與傳統(tǒng)成像技術(shù)相結(jié)合,即使在白天,HADAR 也可以提供有關(guān)場景的獨(dú)特信息。
原文標(biāo)題:AI提高自動駕駛夜視能力,檢測黑夜、霧天場景和白天一樣
文章出處:【微信公眾號:智能感知與物聯(lián)網(wǎng)技術(shù)研究所】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報(bào)投訴
-
物聯(lián)網(wǎng)
+關(guān)注
關(guān)注
2913文章
44918瀏覽量
376865
原文標(biāo)題:AI提高自動駕駛夜視能力,檢測黑夜、霧天場景和白天一樣
文章出處:【微信號:tyutcsplab,微信公眾號:智能感知與物聯(lián)網(wǎng)技術(shù)研究所】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
NVIDIA DRIVE技術(shù)推動自動駕駛發(fā)展
隨著 AI 技術(shù)的飛速發(fā)展,汽車行業(yè)正經(jīng)歷一場深刻而全面的智能化轉(zhuǎn)型。以 NVIDIA DRIVE 技術(shù)為核心,NVIDIA 正在推動著自動駕駛技術(shù)不斷邁向新高度。2025 年,AI
一文聊聊自動駕駛測試技術(shù)的挑戰(zhàn)與創(chuàng)新
隨著自動駕駛技術(shù)的飛速發(fā)展,自動駕駛測試的重要性也日益凸顯。自動駕駛測試不僅需要驗(yàn)證車輛的感知、決策、控制模塊的獨(dú)立性能,還需確保系統(tǒng)在復(fù)雜場景中運(yùn)行的整體可靠性。然而,



汽車?yán)走_(dá)回波發(fā)生器的技術(shù)原理和應(yīng)用場景
的波束并向前傳播,以模擬真實(shí)的雷達(dá)工作環(huán)境。應(yīng)用場景
自動駕駛系統(tǒng)的開發(fā)和測試:在自動駕駛系統(tǒng)的開發(fā)和測試過程中,汽車電子雷達(dá)回波發(fā)生器可以模擬各種交通場景下的目標(biāo)回波,評估雷達(dá)系統(tǒng)在
發(fā)表于 11-15 14:06
基于場景的自動駕駛驗(yàn)證策略
可選方案是將實(shí)際交通狀況做出總結(jié)生成具有高度代表性的交通場景,通過仿真分析自動駕駛系統(tǒng)在這些場景上的安全性。然而交通場景中元素的復(fù)雜性與失敗事件的罕見性導(dǎo)致難于準(zhǔn)確分析系統(tǒng)失敗的概率和


RISC-V適合什么樣的應(yīng)用場景
解決方案,適用于邊緣計(jì)算、智能攝像頭、智能音箱等場景。
靈活性:RISC-V的開放性使得其能夠更容易地與各種AI框架和算法集成,滿足不同的AI應(yīng)用需求。
4. 自動駕駛和汽車電子
定制
發(fā)表于 07-29 17:16
FPGA在自動駕駛領(lǐng)域有哪些優(yōu)勢?
FPGA(Field-Programmable Gate Array,現(xiàn)場可編程門陣列)在自動駕駛領(lǐng)域具有顯著的優(yōu)勢,這些優(yōu)勢使得FPGA成為自動駕駛技術(shù)中不可或缺的一部分。以下是FPGA在自
發(fā)表于 07-29 17:11
FPGA在自動駕駛領(lǐng)域有哪些應(yīng)用?
是FPGA在自動駕駛領(lǐng)域的主要應(yīng)用:
一、感知算法加速
圖像處理:自動駕駛中需要通過攝像頭獲取并識別道路信息和行駛環(huán)境,這涉及到大量的圖像處理任務(wù)。FPGA在處理圖像上的運(yùn)算速度快,可并行性強(qiáng),且功耗
發(fā)表于 07-29 17:09
Nullmax正式推出新一代自動駕駛技術(shù)Nullmax Intelligence
7月16日,Nullmax在上海舉辦“AI無止境,智變新開端”2024技術(shù)發(fā)布會,正式推出新一代自動駕駛技術(shù)Nullmax Intelligence(簡稱“NI”)。新技術(shù)著重于打造全場景

標(biāo)貝數(shù)據(jù)采集標(biāo)注在自動駕駛場景中落地應(yīng)用實(shí)例
AI數(shù)據(jù)服務(wù)作為人工智能和機(jī)器學(xué)習(xí)的基礎(chǔ),在自動駕駛領(lǐng)域中有著重要地位。與其他人工智能應(yīng)用場景相比,自動駕駛的落地場景相對復(fù)雜,想要讓汽車本

未來已來,多傳感器融合感知是自動駕駛破局的關(guān)鍵
/L4級自動駕駛賽跑的元年。
馬斯克評論FSD 12.3版本的左轉(zhuǎn)彎操作就像人類司機(jī)一樣。如果FSD 12.3版本成功,將基本顛覆目前市場上的智能駕駛技術(shù)路線。基于“數(shù)據(jù)/算法/算力”的無人駕
發(fā)表于 04-11 10:26
NanoEdge AI的技術(shù)原理、應(yīng)用場景及優(yōu)勢
硬件設(shè)計(jì)則是為了確保設(shè)備在執(zhí)行這些任務(wù)時(shí)能夠保持低能耗,從而提高其續(xù)航能力。
2、應(yīng)用場景
NanoEdge AI 可以廣泛應(yīng)用于各種物聯(lián)網(wǎng)設(shè)備和傳感器,如智能家居、工業(yè)
發(fā)表于 03-12 08:09
自動駕駛測試場景深度解析
在自動駕駛測試場景標(biāo)準(zhǔn)化過程中,實(shí)現(xiàn)不同采集平臺和技術(shù)方案的兼容性以及數(shù)據(jù)庫數(shù)據(jù)的互通共享,主要可以從以下幾個(gè)方面著手。
發(fā)表于 02-29 10:12
?1065次閱讀






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論