") 瑪格阿爾法磁性角度傳感器系列的優(yōu)勢(shì)
瑪格阿爾法磁性角度傳感器系列的優(yōu)勢(shì)
瑪格阿爾法磁性角度傳感器系列產(chǎn)品簡(jiǎn)介
介紹
在眾多的機(jī)械系統(tǒng)中,檢測(cè)位置/速度能力已經(jīng)成為系統(tǒng)控制和監(jiān)控的一項(xiàng)基本要求。在低速位置測(cè)量應(yīng)用中,如電機(jī)驅(qū)動(dòng)通常會(huì)使用電阻電位器。而在高速應(yīng)用中,如伺服電機(jī)則常使用光電編碼器。
其中,電位器價(jià)格優(yōu)惠,但作為基于移動(dòng)觸點(diǎn)元件,它們的缺點(diǎn)也顯而易見(jiàn):易遭受機(jī)械接觸磨損、易受外部環(huán)境因素?fù)p壞(包括濕氣和污垢侵入)。光電編碼器精度高,但由于其結(jié)構(gòu)的復(fù)雜性,因此價(jià)位也相當(dāng)高。面對(duì)這樣的窘境,其實(shí)工程師還可以選擇非接觸式旋轉(zhuǎn)磁性角度傳感器(瑪格阿爾法系列產(chǎn)品)來(lái)解決這一難題。
瑪格阿爾法系列傳感器優(yōu)勢(shì)明顯:
8-14b 8-14b位角度輸出,同時(shí)具備SPI/ABZ/PWM/UVW UVWSPI/ABZ/PWM/UVW多種輸出接口可選
非接觸式磁性傳感可靠性高,使用壽命長(zhǎng)
成本低,封裝尺寸小
支持靈活的同軸、偏軸和側(cè)軸擺放
MPS 馬加爾法傳感器中使用了一組垂直霍爾陣列,用來(lái)測(cè)量磁場(chǎng)的水平矢量。這種磁場(chǎng)通常來(lái)自位于傳感器上方或側(cè)面的一對(duì)徑向磁化的磁極。瑪格阿爾法霍爾陣列的這種傳感技術(shù)支持多種磁鐵-傳感器擺放位置(見(jiàn)圖1)。
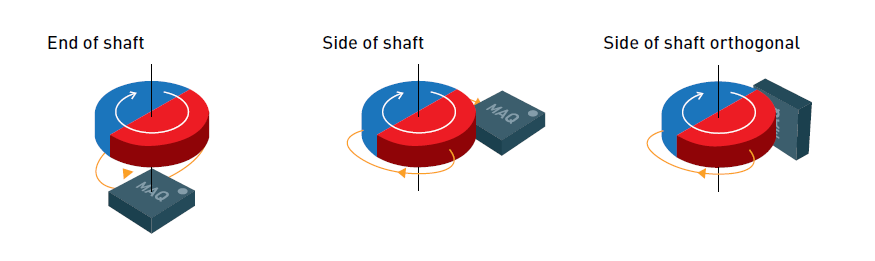
圖 1:支持同軸和側(cè)軸拓?fù)?/strong>
傳感器前端包含一個(gè)面向各個(gè)方向的專(zhuān)有霍爾元件陣列。該陣列以高速(每1μs)連續(xù)采樣并產(chǎn)生近似正弦的內(nèi)部信號(hào)波形。該波形過(guò)零點(diǎn)處的相位角直接與被測(cè)角度相關(guān)。在每個(gè)測(cè)量周期開(kāi)始后,使用快速數(shù)字計(jì)數(shù)器測(cè)量過(guò)零點(diǎn)的相位,這個(gè)值直接反映了每個(gè)測(cè)量角度的大小。圖 2 展出了典型采樣波形圖。計(jì)數(shù)器得到的值被傳遞到低延遲數(shù)字濾波模塊,由該模塊負(fù)責(zé)均衡噪聲和提高傳感器的輸出分辨率。根據(jù)不同濾波器深度,分辨率最高可達(dá)14位(3西格瑪)。
MPS將這種獨(dú)有的“相位到數(shù)字”的技術(shù)稱(chēng)為螺旋軸TMTMT。它與傳統(tǒng)的X-Y霍爾模塊和反正切計(jì)算技術(shù)有所不同。傳統(tǒng)基于反正切的算法具有數(shù)百微秒的延遲,會(huì)導(dǎo)致更大的角度滯后(測(cè)量的角度與實(shí)際機(jī)械角度)。而瑪格阿爾法前端的快速采樣率和數(shù)字濾波器的低延遲設(shè)計(jì),從前端捕獲到的輸出接口可用角度信息的角度滯后通常僅為10μs。
這使得瑪格阿爾法傳感器在非常高的轉(zhuǎn)速下依然能夠捕獲低延時(shí)的角度。由于延遲固定在大約10μs,因此恒定轉(zhuǎn)速下的滯后角度僅為10μs×(以度/秒為單位)。例如,轉(zhuǎn)速在550,000 rrpm時(shí),從采集到輸出的角度滯后為每秒300 000 000度×10μ秒=3度。
與競(jìng)爭(zhēng)對(duì)手的磁性解決方案相比,螺旋軸TMTMT技術(shù)還支持更廣泛的磁場(chǎng)強(qiáng)度,例如使用總磁阻(GMR)或各向異性磁阻(AMR)材料的磁解決方案。瑪格阿爾法傳感器可支持的場(chǎng)強(qiáng)范圍為15米T到100米T以上。這樣,磁材料的選擇以及磁體至傳感器的定位設(shè)計(jì)變得更加靈活。
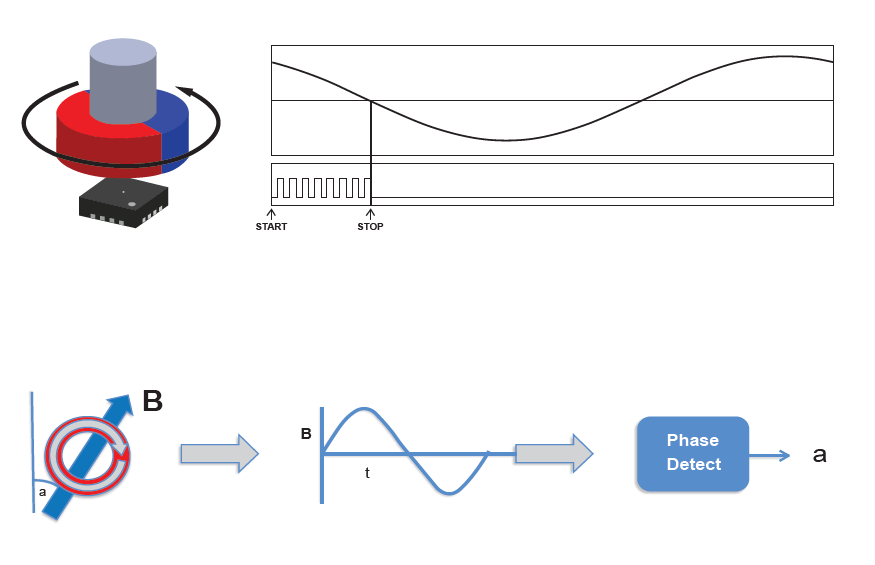
圖 2:旋軸TM技術(shù)
數(shù)字濾波模塊
數(shù)字濾波模塊針對(duì)每個(gè)不同的瑪格阿爾法傳感器類(lèi)型都進(jìn)行了優(yōu)化,得以更好地匹配目標(biāo)應(yīng)用。濾波器的濾波深度(處理的樣本數(shù)量與時(shí)間的關(guān)系)會(huì)影響傳感器的最終輸出分辨率,濾波器深度越大(樣本越多),分辨率越高。
更深的濾波器深度會(huì)導(dǎo)致濾波器分辨率增加而帶寬降低(因?yàn)樘幚砀鄻颖拘枰L(zhǎng)的時(shí)間)。同樣,隨著帶寬減小,濾波器的時(shí)間常數(shù)也會(huì)增加。這將影響整個(gè)系統(tǒng)環(huán)路的響應(yīng)時(shí)間,同時(shí)也決定了傳感器在具有動(dòng)態(tài)角度變化或旋轉(zhuǎn)速度變化的系統(tǒng)中的性能。瑪格阿爾法系列的濾波器時(shí)間常數(shù)(tau)范圍為1ms至16時(shí)。該值可用于計(jì)算加速或減速期間產(chǎn)生的角度滯后誤差。速度變化下的角度滯后誤差等于單位為度/每秒2(即加速度/減速度)乘以tau值的平方。后期文章將深入探討這種效應(yīng)以及如何為應(yīng)用程序選擇合適的帶寬。
傳感器系列產(chǎn)品
基于不同的應(yīng)用,我們已經(jīng)研發(fā)了幾款具有不同性能和輸出接口類(lèi)型的瑪格阿爾法產(chǎn)品。所有的瑪格阿爾法傳感器都可以通過(guò)SPI總線輸出數(shù)字角度值,在某些設(shè)備中也可以通過(guò)SSI輸出。此外,特定的型號(hào)還提供了增量正交ABZ編碼器輸出,PWM輸出或UVW換向信號(hào),用于電機(jī)控制。其他性能包括可以設(shè)置磁場(chǎng)檢測(cè)的閥值用于磁鐵位置檢測(cè)和磁場(chǎng)強(qiáng)度檢測(cè),提供了用于改善側(cè)裝模式下輸出線性化的寄存器以及零角度位置的設(shè)置。
改善側(cè)裝線性化特性允許傳感器調(diào)整霍爾陣列在X或Y軸上的增益,以補(bǔ)償此模式中存在的磁場(chǎng)矢量不平等現(xiàn)象,并重新獲得線性輸出響應(yīng)。零角度位置調(diào)整意味著不需要手動(dòng)調(diào)整磁極對(duì)準(zhǔn)傳感器的方向,可以在軟件中調(diào)整偏移以獲得所需的零角度位置。所有可編程功能都可以存儲(chǔ)在非易失性片上EEPROM(EEPROM)存儲(chǔ)器中。每次開(kāi)機(jī)后都會(huì)自動(dòng)加載這些設(shè)置。圖 3展示了瑪格阿爾法傳感器的通用功能框圖。
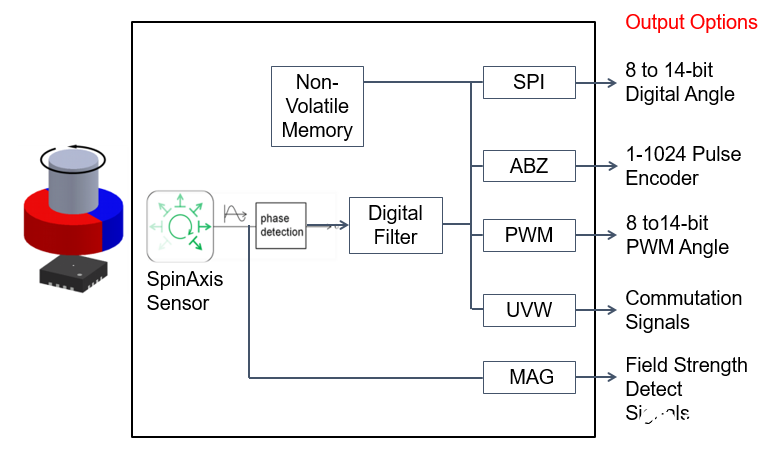
圖 3:瑪格阿爾法通用功能框圖
下表列出了所有瑪格阿爾法系列產(chǎn)品:
| 適用于驅(qū)動(dòng)器、制動(dòng)器等的通用型角度編碼器 | MA704 | 10位,高帶寬(3kHz 3kHz)-適用于動(dòng)態(tài)閉環(huán)控制應(yīng)用 |
| 位置/速度控制 | MA702 MA702 MA702 MA702 | 12位,中帶寬(390赫茲)-適用于通用型控制應(yīng)用 |
| MA710 MA710 MA710 MA710 | 12位,低磁場(chǎng)、低帶寬(90赫茲)-側(cè)軸安裝模式/低磁場(chǎng)應(yīng)用的理想之選 | |
| MA 730 | 14位,低帶寬(23Hz 23Hz)-適用于高分辨率、低速應(yīng)用 | |
| MA732 MA732 | 9-14 年9-14 年9-14 年9-14位,可配置濾波器帶寬-可根據(jù)應(yīng)用進(jìn)行調(diào)節(jié) | |
| 用于直流無(wú)刷電機(jī)(退伍軍人)輸出)的通用型角度編碼器 | MA302 MA302 | 與MA702 MA702 MA702 MA702相同,但采用適用于無(wú)刷電機(jī)、伺服電機(jī)和驅(qū)動(dòng)器的UVW換向信號(hào) |
| 用于伺服電機(jī)和驅(qū)動(dòng)器 | MA301 MA301 | 與MA710 MA710 MA710 MA710相同,但采用適用于無(wú)刷電機(jī)的UVW換向信號(hào),是側(cè)軸/低磁場(chǎng)應(yīng)用的理想之選 |
| MA330 | 9-14 年9-14 年9-14 年9-14位,可配置濾波器帶寬,適用于無(wú)刷電機(jī),可根據(jù)應(yīng)用、UVW調(diào)節(jié)帶寬 | |
| 可替代直流無(wú)刷電機(jī)換向應(yīng)用中的3個(gè)霍爾開(kāi)關(guān) | MA102 | UVW UVW輸出接口,具有1-8極對(duì)仿真功能 |
| 適用于低功率應(yīng)用 | MA780 | 8-12月8日至12日月8日至12日位,自動(dòng)采樣環(huán)路,采用3毫米x3毫米 QFN封裝 |
| MA781 | 8-12月8日至12日月8日至12日位,自動(dòng)采樣環(huán)路,采用2毫米x2毫米口徑封裝 | |
| 人機(jī)交互界面,速度<200rpm | MA800 | 8位,SPI輸出接口 |
| MA820 | 8位,SPI輸出接口,每圈64脈沖的ABZ | |
| MA850 | 8位,SPI和PWM輸出接口 |
Ma7xx 系列產(chǎn)品具有9-14 年9-14 年9-14 年9-14位SPI輸出分辨率,同時(shí)具備SSI、ABZ和PWM多種輸出接口。此系列產(chǎn)品適用于任一款通用型角度/速度傳感應(yīng)用,包括驅(qū)動(dòng)器、編碼器和磁場(chǎng)定向電機(jī)控制(FOC)應(yīng)用。該系列最新產(chǎn)品MA732 MA732可以允許用戶(hù)編程數(shù)字濾波器的參數(shù),如分辨率,時(shí)間常數(shù)和啟動(dòng)時(shí)間等,還具有可調(diào)節(jié)的ABZ遲滯功能。
MA780和MA781適應(yīng)于平均功耗低的應(yīng)用,比如電池供電設(shè)備。這兩款芯片可以在休眠、喚醒和采樣三種模式之間進(jìn)行自動(dòng)切換以實(shí)現(xiàn)低功率模式。Ma780采用3毫米x3毫米 QFN封裝,MA781則采用小尺寸2毫米x2毫米口徑封裝。
Ma3xx系列產(chǎn)品具有9-14 年9-14 年9-14 年9-14位SPI輸出分辨率,同時(shí)具備ABZ和UVW兩種輸出接口。UVW接口可以取代許多三相無(wú)刷電機(jī)中三個(gè)獨(dú)立霍爾傳感器產(chǎn)生的電機(jī)換向信號(hào)。通過(guò)使用一對(duì)簡(jiǎn)單的磁極,MA3xx系列能夠模擬三個(gè)霍爾傳感器的波形,并產(chǎn)生UVW輸出,支持具有1至8對(duì)極的轉(zhuǎn)子。
將SPI角度或ABZ編碼器輸出與UVW換向相結(jié)合,可實(shí)現(xiàn)非常緊湊的無(wú)刷伺服電機(jī)解決方案。這對(duì)于小尺寸微型電機(jī)來(lái)說(shuō)非常有用,因?yàn)椴豢赡茉谖⑿碗姍C(jī)的定子繞組中嵌入三個(gè)霍爾開(kāi)關(guān)。
MA330允許對(duì)數(shù)字濾波器參數(shù)進(jìn)行編程來(lái)優(yōu)化伺服電機(jī)控制中的環(huán)路帶寬,以及可調(diào)節(jié)的ABZ遲滯,以支持給定分辨率設(shè)置下更高的每匝數(shù)脈沖數(shù)。
對(duì)于僅需替代3個(gè)霍爾傳感器的非伺服應(yīng)用MA102(MA102)是一款僅提供UVW信號(hào)的最小解決方案。它具有互補(bǔ)的輸出極性,可以從傳感器接線器返回電機(jī)控制器,從而獲得更高的信噪比性能。
針對(duì)汽車(chē)應(yīng)用,MAQ470和MAQ430號(hào)分別作為MA702 MA702 MA702 MA702和MA302 MA302 12位角度傳感器的AECQ Grade-1版本。這兩款產(chǎn)品能夠在-40°C至+ 125°C溫度內(nèi)工作,適用于車(chē)輛應(yīng)用中的駕駛室和車(chē)身傳感電子設(shè)備。典型應(yīng)用包括信息娛樂(lè)控制、HVAC襟翼角度控制和彈出門(mén)把手。
最后,針對(duì)簡(jiǎn)單的旋轉(zhuǎn)用戶(hù)界面應(yīng)用,性?xún)r(jià)比高的8位MA8xx系列產(chǎn)品可代替機(jī)械旋轉(zhuǎn)開(kāi)關(guān)或電位器。它們還具有瑪格阿爾法磁場(chǎng)閾值檢測(cè)功能,可以在旋鈕設(shè)計(jì)中實(shí)現(xiàn)按鈕動(dòng)作。
所有瑪格阿爾法傳感器均采用節(jié)省空間的3毫米x3毫米 QFN封裝(除了MA781采用2毫米x2毫米口徑封裝),采用3.3V電源供電。電流消耗通常在10mA至13mA范圍內(nèi),新品低功率產(chǎn)品MA780和MA781可實(shí)現(xiàn)微安級(jí)的平均電流。
責(zé)任編輯:彭菁
-
傳感器
+關(guān)注
關(guān)注
2552文章
51228瀏覽量
754681 -
電位器
+關(guān)注
關(guān)注
14文章
1012瀏覽量
66872 -
機(jī)械系統(tǒng)
+關(guān)注
關(guān)注
0文章
64瀏覽量
9657
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
基于MLX90316的磁性角度傳感器的設(shè)計(jì)方案

角度傳感器怎么使用。
基于MLX90316的磁性角度傳感器設(shè)計(jì)方案
為什么選擇磁性傳感器
磁性傳感器(磁性開(kāi)關(guān))簡(jiǎn)介及應(yīng)用
角度傳感器_什么是角度傳感器
ADI業(yè)內(nèi)精度最高、速率最快的磁性角度傳感器ADA4571
磁性傳感器的分類(lèi)與應(yīng)用
剖析光傳感器及磁性傳感器的應(yīng)用

角度傳感器的工作原理 角度傳感器原理及應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論