 開發指引 | R24DVD1人體存在探測雷達
開發指引 | R24DVD1人體存在探測雷達
本期將會講解當開發者拿到Micradar云帆瑞達的R24DVD1人體存在探測模組后,如何進行開發~
目錄
1. 軟硬件的準備
2.硬件接線教程
3.配置教程及問題解析
4.上位機介紹
5.測試示例演示
毫米波雷達的原理是通過發射電磁波并接收目標反射回的信號,并根據不同的運動幅度,計算出人體的方向、距離、速度、體動參數、心跳、呼吸。R24DVD1利用毫米波雷達檢測原理,根據人體體動參數甚至是呼吸探測判斷空間內有人、無人狀態,人體靜止狀態下也能實現有、無人判斷,并能實時輸出目標的運動距離和靜止距離
入手之前先下載好R24DVD1的上位機軟件及相關資料,可在云帆瑞達官網下載
01 軟硬件的準備
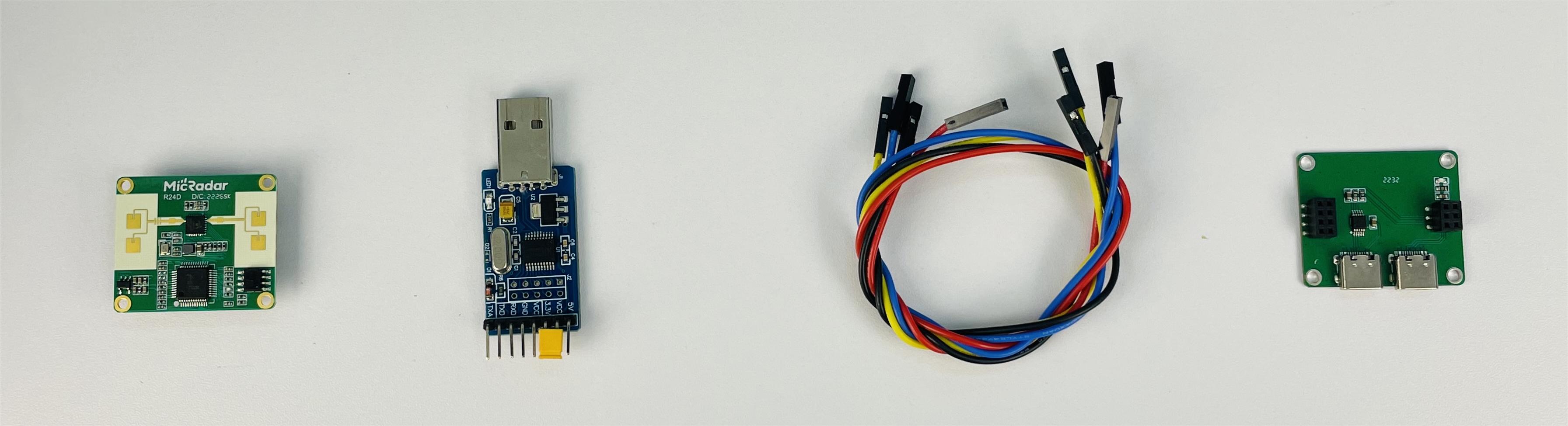
硬件工具:雷達模組、串口工具【USB-TTL-CH340】、杜邦線、雷達轉接板
軟件工具:sscom串口軟件&雷達應用上位機GUI
文檔準備:數據手冊、用戶手冊、上手指南、測試用例
02 硬件接線教程
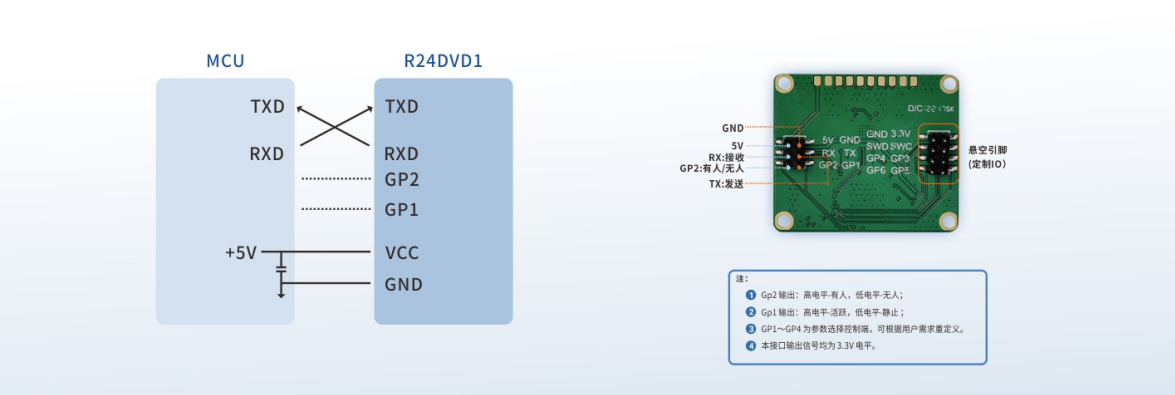
串口連接有兩種方式,一是利用串口工具,通過4根杜邦線分別與雷達的5V、GND、TX、RX進行連接;二是直接使用云帆瑞達自研雷達轉接板進行連接調試。
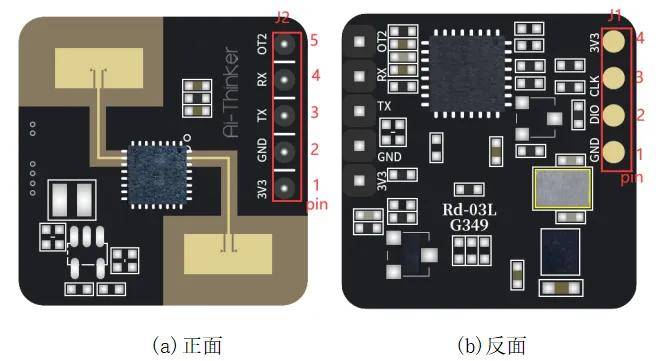
一、串口工具與雷達引腳接線如下
引腳 | 描述 | 典型值 | 說明 | |
接口1 | 1 | 5V | 5.0V | 電源輸入正端 |
2 | GND | 地 | ||
3 | RX | 3.3v | 串口接收 | |
4 | TX | 3.3v | 串口發送 | |
5 | GP2 | 3.3V/0V | 有人/無人 | |
6 | GP1 | 3.3V/0V | 活躍/靜止 | |
接口2 | 1 | 3V3 | 3.3V | 輸出電源 |
2 | GND | 地 | ||
3 | SL | 保留 | ||
4 | 保留 | |||
5 | GP3 | 備用擴展引腳 | ||
6 | GP4 | 備用擴展引腳 | ||
7 | GP5 | 備用擴展引腳 | ||
8 | GP6 | 備用擴展引腳 |
二、雷達轉接板與雷達模組連接
雷達轉接板與雷達支持Pin To Pin連接,再通過TypeC線連接uart口即可實現串口通訊功能

03 配置教程
我們完成正確的通訊連接后,將與R24DVD1完成接線的串口工具接入電腦端口,打開sscom串口軟件,完成以下設置即可查看數據。
(1)選擇雷達模組所在的端口號
(2)選擇波特率為115200
(3)勾選HEX顯示
(4)設置完成后打開串口

*在實際操作過程中可能出現的無數據情況,問題解析如下
使用串口工具與雷達連接時:
(1)串口工具的供電線、地線與雷達反接,此時會導致雷達供電異常,甚至會引起雷達短接燒壞風險。
(2)串口工具的TXD/RXD與雷達的TX/RX非交叉連接時,此時雷達的輸出數據無法正常給到串口工具,導致無數據輸出;
使用雷達轉接板與雷達連接時:
(1)雷達插針與轉接板座子錯位連接,導致雷達數據無法正常通訊;
(2)轉接板的typc-C口連接錯誤,未選擇uart口;
針對雷達數據異常問題分析:
(1)串口軟件上數據顯示格式設置為【非HEX格式顯示】,導致數據顯示亂碼;
(2)串口軟件上波特率選擇錯誤,導致顯示不匹配;
04 上位機介紹
在配置完相應的雷達數據后,我們打開雷達上位機,即可看到雷達已經開始正常輸出數據了
下面簡單介紹上位機的顯示內容:
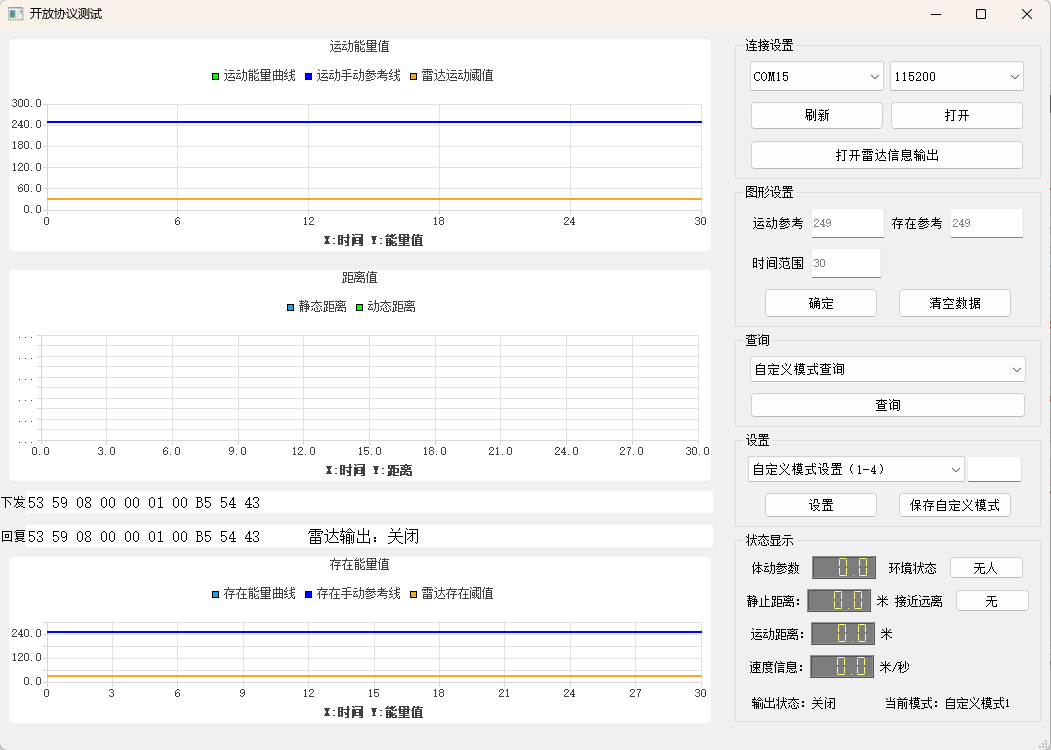
運動能量值:當人員進行肢體運動或者走動時,運動能量值會跟隨動量的大小進行波動;動量越大,曲線越大,反之則低且平緩;
距離值:包含靜態距離和動態距離;靜態距離代表人員微動呼吸時所在距離;動態距離代表人員大幅度運動走動時所在距離;距離值會跟隨人員的位置變化實時變動;
存在能量值:曲線表示人員保持靜止或微動呼吸時雷達探測到的微動能量大小,微動呼吸幅度越強,距離雷達越近,則曲線越高,反之則低且平緩;
圖形設置:運動參考線與存在參考線的設置,支持在曲線顯示區域設定一個虛擬門限值,方便開發者對實時的能量波動與設想門限進行清晰比對,為后續邏輯設置做預估;
時間范圍:支持調整曲線顯示區域的橫坐標時間維度,設置數值越大,同樣的顯示區域中則能顯示更長時間的曲線數據;
查詢&設置:涵蓋了R24DVD1所有開放接口的查詢和設置功能,詳情請下載【協議應用說明書】。
以上就云帆瑞達R24DVD1人體存在探測雷達開發指引,值得一提的是,R24DVD1支持底層數據全開源,開發者可以根據開源數據進行二次開發來適應更豐富的使用場景及應用。
-
傳感器
+關注
關注
2552文章
51217瀏覽量
754612 -
雷達
+關注
關注
50文章
2949瀏覽量
117668 -
雷達傳感器
+關注
關注
3文章
286瀏覽量
34485
發布評論請先 登錄
相關推薦

微波雷達傳感器模塊,智能衛生間技術應用,人體存在感應雷達
存在感應雷達感應模塊,人體回波特征探測雷達,飛睿科技雷達模組應用
酒店人體存在雷達模塊方案,雷達傳感器技術應用
毫米波雷達模組,智能家居雷達感應技術,存在感應雷達方案
人體存在感應雷達模塊,多普勒原理技術應用
一「探」萬物,打通居家物聯之「壁壘」 ——評測云帆瑞達R24AVD1人體精準存在雷達模組

第一屆“云帆杯”人體呼吸探測毫米波雷達應用設計大賽正式啟動

R24BBD1_數據手冊_V1
人體存在檢測雷達模組_數據手冊_V1
1-R24DVD1-硬件上手指南-PC端 V1
0.1mA!24GHz超低功耗人體存在毫米波雷達模組





 工商網監
工商網監
評論