 讓PIL仿真更接近實際的Simscope
讓PIL仿真更接近實際的Simscope
Tips :Simscape是Simulink中強大的物理模擬庫,它可以搭建力學、電學、磁場、流體等多種物理場景,以物理量的方式進行仿真,可用于機器人、無人機、汽車的仿真。
如果已經在倉庫中下載最新模型的讀者應該能發現,最新的模型對FOC核心算法和算法狀態機分別都進行了PIL測試。倉庫中最新的模型如下圖所示:
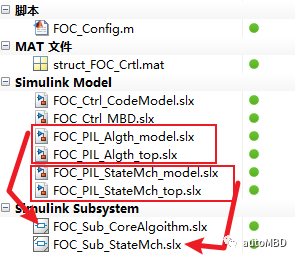
倉庫中最新的FOC電機控制模型 - From autoMBD
分別介紹一下上圖中這些模型的作用:
- FOC_Ctrl_CodeModel .slx
集成式MBD開發中,用于生成模型代碼,包括狀態機和FOC核心算法使用的即為該模型。 - FOC_Ctrl_MBD .slx
所“建”即所得的最新模型,除了算法狀態機和FOC核心算法,還包括底層驅動、外設初始化和中斷管理等,該模型對所講的模型進行了更新和優化。 - FOC_PIL_Algth_model .slx & FOC_PIL_Algth_top .slx
對FOC核心算法進行PIL測試的model模型和top模型。 - FOC_PIL_StateMch_model .slx & FOC_PIL_StateMch_top .slx
對電機控制狀態機進行PIL測試的model模型和top模型。 - FOC_Sub_CoreAlgoithm .slx
FOC核心算法,為Subsystem模型。 - FOC_Sub_StateMch .slx
電機控制狀態機模型,為Subsystem模型,且包含了FOC核心算法。
需要注意的是, 原來的MIL (Model In the Loop) 模型被移除了 ,該模型可以用PIL測試的top模型代替,只需要將Model Reference的仿真模式修改為Normal即可,如下圖所示:

PIL和MIL的切換 - From autoMBD
兩個PIL測試的目的是不一樣的:
- FOC核心算法PIL測試
測試FOC算法是否能正常運行,控制性能是否滿足要求,控制參數是否合理,以及開展不同工況的測試。 - 電機控制狀態機PIL測試
測試狀態切換是否正確,電機控制的功能和邏輯是否正確,驗證FOC核心算法的調度是否正常,是電機控制的完整測試。
對這兩個模型分開測試是有必要的,在不同的階段檢測不同的工作,同時也將算法和功能進行了隔離。
分別打開FOC核心算法模型和電機控制狀態機模型的PIL top 模型,可以做一個對比:

FOC算法的PIL top模型 - From autoMBD

電機控制狀態機的PIL top模型 - From autoMBD
可以發現,兩個測試的電機模型是不一樣的: 前者使用的是連續、理想的逆變器和電機模型;而后者使用的是Simcope模型搭建的逆變器和電機模型。 這就是本次補充的重點, 使用Simscape模型可以更加貼近實際情況進行PIL測試 。
那么更加貼近實際情況具體體現在哪里呢?我總結有以下三點:
1. 根據實際MOSFET電路,搭建實現逆變器模型

Simcope逆變器 - From autoMBD
2. 實際電路設計,搭建實現ADC采樣電路,采樣電阻的布置見上圖

Simscape 運放和ADC采樣電路 - From autoMBD
3. 根據芯片外設FTM的工作原理,搭建中心對齊PWM發生器

中心對齊PWM發生器(A相) - From autoMBD
上述三點的實現,均根據實際的電路設計(即DEVKIT驅動板PCB原理圖)和芯片外設(FTM,FlexTimer Module)的工作原理進行搭建的,保證了最大限度的和實際情況一致,可以提高PIL的參考價值:此時的PIL除了底層驅動以外,其他所有的部分,包括狀態機、FOC算法和電路硬件,都進行了驗證和測試。
Tips :DEVKIT驅動板PCB原理圖和S32K3手冊均能在autoMBD的資源庫中找到,私信回復關鍵詞“ 資源 ”即可收到鏈接信息。
使用Simscape搭建硬件電路的模型,這樣做是有意義的。在以前的文章中提到過,我追求的是盡可能減小****MBD的模型和代碼之間的溝壑 ,Simscape至少能實現一部分。
把格局再打開一下,如果利用第三方軟件與Simulink進行聯合仿真,仿真環境會進一步逼近實際情況。
這種聯合仿真有著廣泛的實際案例,很多開發車道線保持、自適應巡航算法的工程師,首先會在電腦的虛擬環境中搭建汽車模型和道路模型(甚至還可以包括行人、路燈),然后通過Simulink聯合仿真來驗證算法。還有其他諸如機器人、無人機等場景。
這些實際場景中, 只需要搭建好算法和狀態機,都能能實現PIL測試,從而同時或分別驗證軟件邏輯、功能、算法和電路硬件 。
上述的驗證過程,如果 把復雜的受控對象放在實時機中運算 ,而不是在電腦中,這個過程就變成了HIL(Hardware In the Loop)。PIL和HIL相比,就是缺少了實時性。
雖然PIL不是實時運算,但實時性的驗證可以通過PIL的軟件運算耗時來評估,這一點在PIL是可以實現的。這樣就可以最大限度的降低成本(通常實時仿真機價格幾萬到幾十萬不等),同時提高驗證的可信度,最大限度挖掘PIL的作用。
還需要提的一點是,為了保證PWM的分辨率,算法狀態機的PIL測試,其步長設置為:
Ts_simscape = 1/40000000
-
機器人
+關注
關注
211文章
28512瀏覽量
207510 -
電機控制
+關注
關注
3537文章
1882瀏覽量
268973 -
狀態機
+關注
關注
2文章
492瀏覽量
27577 -
simulink仿真
+關注
關注
0文章
75瀏覽量
8584 -
FOC控制
+關注
關注
0文章
43瀏覽量
2839
發布評論請先 登錄
相關推薦
STM32F429做的PIL仿真速度非常慢的原因?
怎么使用PIL讀取熱電偶傳感器的溫度?
嘗試運行集成模型時出現PIL編譯錯誤怎么解決?
NXPs32k144 evb上的PIL仿真問題如何解決?
為什么無法為“State_Machine”執行處理器在環 (PIL) 仿真?
如何設置PIL模擬的環境以及在哪里包含我的C代碼項目?
Power Partners推出恒壓LED模塊PIL300U

基于PXI總線的半實物仿真系統
關于MIL、SIL、PIL和HIL之間的聯系和異同分析

PiL測試實戰(上)| 單元級代碼的PiL測試

PiL測試實戰(下)| PiL階段的閉環測試
TPT19新特性之在虛擬環境中執行PiL測試

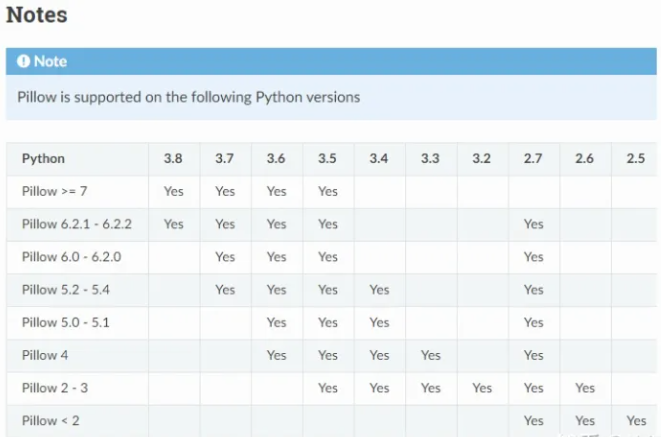
如何安裝Python圖像處理PIL庫





 工商網監
工商網監
評論