 從不同的視角理解相位響應曲線
從不同的視角理解相位響應曲線
當下,在數字音頻世界中,基于快速傅里葉變換(FFT)和時間延時譜(TDS)功能的音頻分析儀能夠很輕松地揭示揚聲器的振幅響應和相位響應。這些軟件分析儀并不昂貴,被廣泛應用于現場擴聲、固定安裝和揚聲器的研發當中。其中耳熟能詳的軟件包括ARTA、Smaart、Systune和EASERA等等。
相位響應是一個常被提及的話題。很多從業者都會使用軟件中的延時捕捉器、自動延時捕捉或相位補償等相關功能來檢查相位響應。盡管如此,他們當中的大多數人并不了解這一功能背后的基本原理。本文面向具有揚聲器測量經驗的讀者,討論如何設置一個正確的時間參考值以便解讀相位響應。
1 有關相位響應的基本原理
1.1脈沖響應與數字音頻
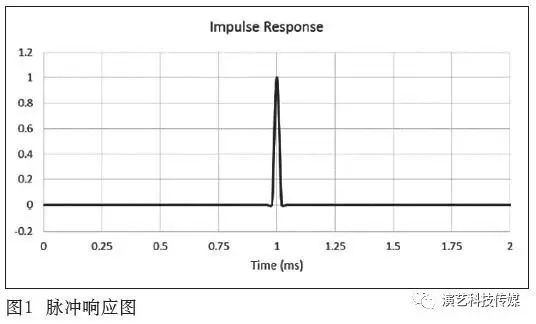
首先討論一下脈沖響應圖,如圖1所示,它展示了一個理想狀態下的脈沖響應(狄拉克脈沖),其峰值出現在1 ms。這個時域圖所顯示的信息包括:
- 一個脈沖能量出現在1 ms時間點上;
- 該信號的傳輸延時為1 ms;
- Y軸上的數值為1,意味著信號振幅為+1。
仔細分析圖1就能發現,脈沖響應的起始點早于1 ms。隨之而來的問題是,信號到達的實際時間的確略早于1 ms嗎?
如果將脈沖響應曲線通過點與點相連接構成,則有助于進行視覺化觀察。當圖1僅通過圖像點標記數值時,則變成圖2所示的狀態,能夠清楚地看到,脈沖僅僅包含一個恰好在1 ms時到達的能量尖峰。理解脈沖響應從何處開始是讀取相位響應的第一步。并非所有分析儀都能夠顯示圖像點,但了解數字設備中的曲線如何形成是非常重要的。

注意,在數字域中,所有的數值都是離散的(非連續的),圖表的精度由采樣率決定。一個狄拉克脈沖僅包含一個采樣。
1.2傳輸延時和相位響應
為什么需要考慮脈沖的起始點?先來驗證一下傳輸延時對于相位響應的影響。傳輸延時可能由如下因素導致。
(1)聲音傳播時間
聲音傳播時間指的是直達聲到達傳聲器需要的時間。聲音在空氣中約以344 m/s(20 ℃)的速度傳播。了解聲音在空氣中的傳播需要時間是十分重要的。
(2)處理延時
數字信號處理、數/模轉換和模/數轉換通常需要一定的處理時間。一個數字揚聲器管理系統的模/數和數/模轉換所產生的延遲通常約為2 ms。如果處理工作繁重,那么處理器會需要更長的處理時間,信號傳輸延時也會相應增加。
1.3有限脈沖響應濾波器
使用有限脈沖響應線性相位濾波器可能導致傳輸延時的增加。針對不同的應用場合,濾波器所帶來的處理延時可能小到1 ms,也可能大于500 ms。在圖3中,假設通過雙通道快速傅里葉變換對一個“完美”的揚聲器進行測量,獲得的脈沖響應為圖中的藍色脈沖,可以觀察到一個0.5 ms的傳輸延時(假設“完美”的測試傳聲器距離揚聲器大約17 cm)。黑色脈沖顯示的是將傳輸延時去除后,脈沖峰值恰好位于0 ms時的情況。這一結果是通過將脈沖響應做周期性移動來獲得的(后文將會對此進行解釋)。紅色脈沖表示傳輸延時被多去除了0.5 ms時的情況。紅色脈沖是一個非因果關系的響應,即輸出并非由輸入所導致。位于0 ms之前的脈沖可以被認為是輸入信號進入系統之前所得到的輸出。
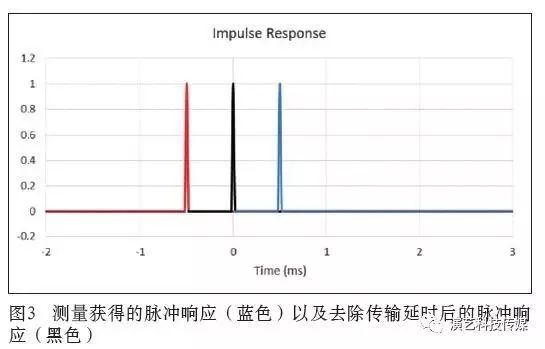
圖4顯示了當傳輸延時被正確去除后揚聲器系統的相位響應,此時脈沖的峰值位于0 ms。請注意相位響應在0°時為平坦的,群延時也同樣為0°。
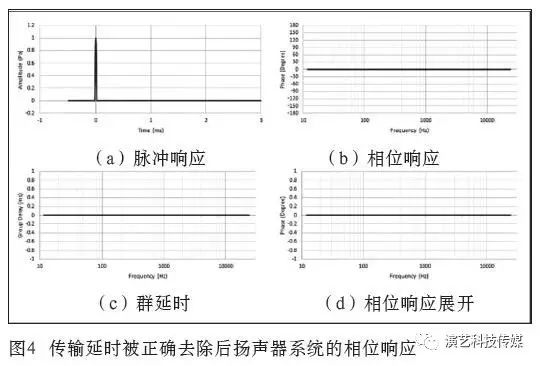
群延時是相位曲線斜率的負值。群延時可由如下公式表示:
其中,ω 是角頻率或頻率乘以2π; φ 為相位;τ為群延時。
圖5是0.5 ms傳輸延時沒有被去除時揚聲器的相位響應,為了更清楚地觀察相位響應,圖5(d)顯示了經過放大后的未折疊部分的相位響應。

通過公式1=T×f(T為周期,單位為s;f為頻率,單位為Hz),可以算出0.5 ms是2 000 Hz的一個周期。聲波的周期是其運動360°所需要的時間。因此,2 000 Hz的相位為-360°(相位角為負值意味著該頻率的相位滯后)。對于1 000 Hz來說,它需要1 ms來完成一個周期,因此它所呈現的相位為-180°。換句話說,在0.5 ms傳輸延時存在的情況下,1 000 Hz被拖慢了半個周期,而2 000 Hz被拖慢了一個周期。在沒有去除傳輸延時的情況下,輸入信號所有的頻率分量都被移動了同樣的時間量。這并不是相位失真。如果把圖5中的X軸(頻率軸)從對數刻度變為線性刻度,則能夠看到一條直線,如圖6所示。注意:相位角為負值意味著該頻率的相位滯后。

從圖5(d)中還能夠觀察到群延時,對應0.5 ms的傳輸延時。當脈沖被過量移動0.5 ms時會發生什么,圖8中將圖5(0.5 ms傳輸延時-藍色曲線)和圖7(過量移除0.5 ms傳輸延時-紅色曲線)中的相位響應疊放在一起,可以觀察到相位響應的不同方向。過量移除傳輸延時會導致正相位和負群延時數值。
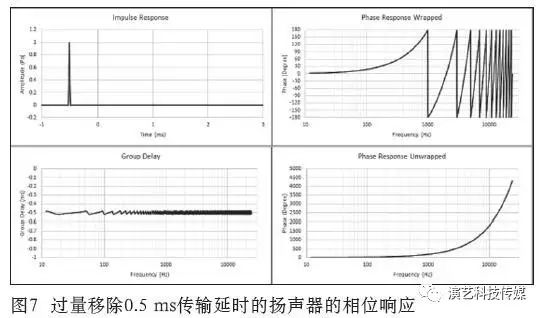

即便是很小的傳輸延時,也會對高頻的相位響應曲線產生極大的影響,理解這一點非常重要。
2 相位響應的正確解讀及傳輸延時的移除
2.1移除傳輸延時
由于傳輸延時會導致一個線性的相位偏移,因此,能夠很容易被預測和計算。移除傳輸延時的常用方法是對信號做周期性移動,使脈沖響應的峰值處在0 ms。這一功能在測量軟件中通常是以自動延時查找(Auto Delay Finder)、自動峰值查找(Auto Peak Finder)、最大峰值歸零(Nomalize Max to Zero)等來命名。但是,這種方式對于相位響應的讀取可能產生誤導,比如,在使用了低通濾波器導致1 000 Hz以上的能量較弱時。
不同的軟件所采用的去除傳輸延時的方法不同(見圖9-圖11)。有些軟件配備了直接將脈沖峰值對齊到0 ms的功能,而其他軟件則需要手動設置光標的位置。光標的位置將會定義一個向左的矩形窗口或者截止位置。

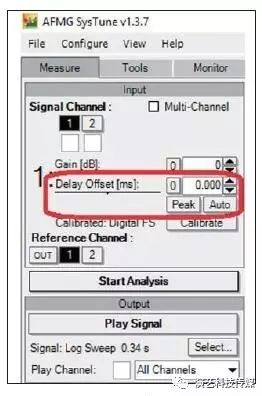
圖10 Systune通過手動輸入延時量或“峰值”按鈕去除傳輸延

需要記住的是,揚聲器的脈沖響應開始于聲音到達測試傳聲器的那一刻。脈沖響應的峰值與到達傳聲器的初始峰值并不總是完全一致,了解這一點十分重要。使用脈沖響應的峰值作為參考點可能會誤導對相位響應的理解與計算。
2.2最小相位(Minimum Phase)簡介
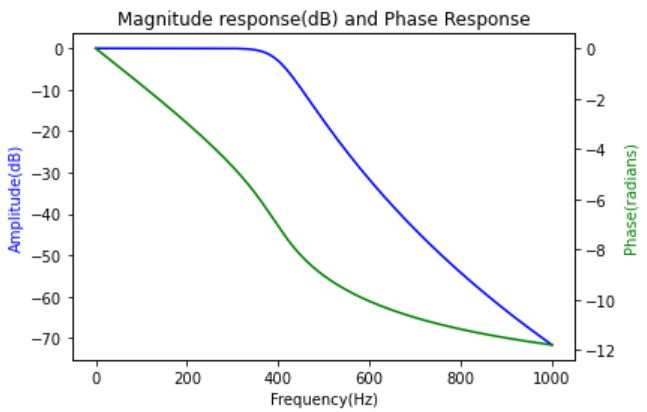
最小相位指振幅響應和相位響應之間的關系可以相互預測,振幅響應的改變會帶來相位響應的改變,這種關系可以通過希爾伯特變換來進行計算。圖12呈現了振幅響應及相對應的最小相位響應的關系。
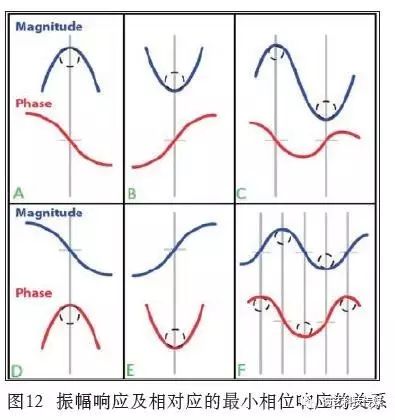
多數揚聲器系統并不是最小相位系統,但多數揚聲器單元則是最小相位系統。最小相位系統的另一個例子是無限脈沖響應濾波器,但全通濾波器除外。
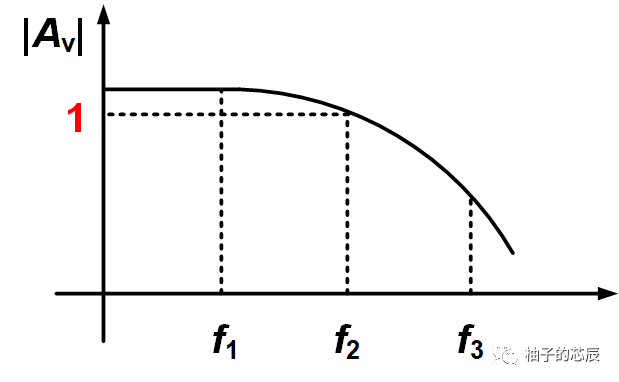
當相位數值為正,意味著該頻率的相位提前。在一個最小相位系統當中,如果頻率響應(從低頻到高頻)呈上升趨勢,相位數值為正。比如,給一個揚聲器單元加上高通濾波器,在濾波器的衰減量從最大到0(不衰減)的頻率范圍內,這個揚聲器單元通常會出現這種情況。另一個例子是使用低通濾波器的情況,在濾波器的衰減量從0(不衰減)到最大的頻率范圍內,頻率響應(從低頻到高頻)呈下降趨勢,在最小相位系統中,這會導致相位數值為負(相位落后)。
圖13中所描述的一個無分頻網絡的揚聲器經過IIR濾波器處理后的響應曲線。其中高通濾波器的截止頻率為60 Hz,低通濾波器的截止頻率為12 500 Hz。通過觀察可以發現:

- 在低頻區(低于200 Hz),因為高通濾波器的作用(頻率響應呈上升趨勢),相位數值為正;
- 在高頻區(高于8 000 Hz),因為低通濾波器的作用(頻率響應呈下降趨勢),相位數值為負;
- 在1 000 Hz附近,相位數值接近于0。這是由于中頻段沒有頻率響應上的改變所導致的結果。
從圖13中還會發現脈沖的峰值稍稍錯開,位于0 ms的右側,以圖像點方式描繪的脈沖響應的情況見圖14,可以看出,初始到達的脈沖信號被準確地對齊在0 ms上。

大多數分析儀并不具備將連續曲線轉化為圖像點的功能,因此,同時對頻域的傳遞函數(振幅響應和相位響應)和時域的脈沖響應進行觀察是十分重要的。而當使用自動延時查找功能時會出現什么情況?通過觀察圖15發現:

- 在對脈沖響應做周期性移動時,頻率響應不會有任何變化;
- 脈沖響應峰值被移動至0 ms;
- 相位響應變得更加平坦,但請注意其數值在10000 Hz之前為正值。相位數值為正,尤其在已知中頻段頻率響應平坦,高頻段(8 000 Hz以上)頻率響應下降的情況下,不難判斷出脈沖響應略微地被過度移動了。
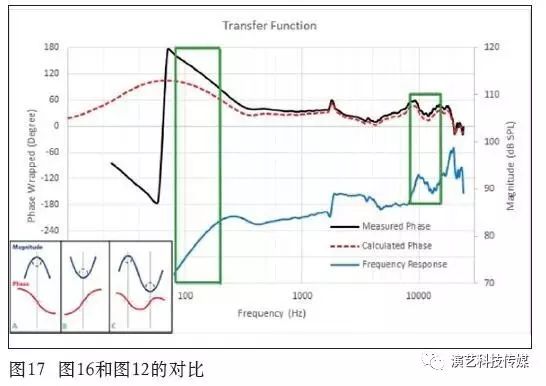
圖16中給出一個數值為正的相位響應的例子,一個2 in揚聲器單元被安裝在封閉的小箱體中,測試傳聲器其距離1 m。該測量在沒有任何電子濾波器介入的情況下進行,是一個最小相位系統。通過圖16可以得到以下結果:

- 紅色虛線是在ARTA中根據振幅響應計算出的最小相位曲線,其結果和實際測量的相位曲線(黑色實線)基本重合,意味著從測量數據中移除的傳輸延時量是正確的;
- 相位的數值一直到20000 Hz都為正數,這是由于振幅響應一直在上升所導致。
圖17為圖16和圖12的對比,請注意兩個綠色矩形區域:在200 Hz以下,頻率響應是上升的,因此如圖12A所示,相位響應開始呈現正值;在高頻區間,10000 Hz附近,測量值及計算值與圖12C是如何相匹配的。
通過對脈沖響應的周期性移動,可以很容易地改變相位響應,或是找到相位響應最為平坦的位置。但是,在實際工作中還必須思考一個問題:得到的相位響應是否有意義?
2.3相位響應的正確解讀
在本文中,“正確解讀”是指找到對于工程應用來說有價值的相位響應。請看圖18中的兩組來自于相同的測量文件的相位響應曲線:

- 紅色曲線看上去是更好看(更平坦)的相位響應曲線;
- 黑色曲線有很多彎折,尤其在1 000 Hz以上;
- 黑色曲線對于傳輸延時進行了正確的去除,紅色曲線是將脈沖峰值放置在0 ms所得到的結果(使用自動延時查找功能),輸入信號的極性被反轉了。
有很多方法能夠讓相位響應看上去更加平坦,但這并不意味著平坦的曲線對于工程應用來說是有效的。所以,將會更多地針對黑色曲線進行討論。
再討論另一個相位響應的例子以進行對照。圖19是一只12 in的兩分頻號筒式揚聲器的兩套測量數據,黑色曲線的測量方式是:使用揚聲器內部的模擬分頻電路(無源分頻器),沒有DSP介入,只需要一個功率放大器進行驅動;紅色曲線的測量方法是:通過DSP對高音單元和低音單元做分頻處理(有源分頻器),每個單元各需要一個功放進行驅動。

當正確地移除了脈沖響應的傳輸延時后,就能夠對曲線進行正確的解讀。以下觀察和討論僅集中在與相位相關的話題上。
(1)計算得到的最小相位響應與實際測量得到的相位響應不同
這個情況是正常的。因為這只兩分頻揚聲器無論是使用無源分頻還是有源分頻,它都不是一個最小相位系統。單個的揚聲器單元有可能是最小相位系統,但高音單元和低音單元放在一起作為一個揚聲器系統,分頻器的引入就破壞了它是最小相位系統的可能性,自然也無法通過頻率響應來計算相位響應。
(2)黑色曲線在高頻區間明顯的相位跌落/翻折,尤其在1000 Hz以上
黑色曲線是揚聲器使用無源分頻器時測得的。如果觀察脈沖響應,可以發現在脈沖峰值之前有一個小的起伏,應該是低音單元的脈沖,它弱于較高的脈沖峰尖,這是因為脈沖響應中的高頻能量占了主導;當對低音單元施加一個低通濾波器時(截止頻率低于2 000 Hz),脈沖的高度將會被顯著地減弱。較高的脈沖峰值應該是高音單元,它到達測試傳聲器的時間較晚(大約晚到0.7 ms)。
由于揚聲器使用了無源分頻器,能夠推測:高音單元的音圈相比低音單元的音圈在位置上較為靠后,這通常是由于高頻號筒的深度所導致的;來自低音單元的直達聲首先到達傳聲器,高音單元的聲音在0.7 ms之后到達。正如之前針對圖5的討論,相比低音單元最先到達,高音單元滯后所帶來的額外的傳輸延時導致了高頻相位的跌落/翻折以及較高的群延時數值(隨后即將討論)。
(1)黑色曲線中高頻段(1 000 Hz以上)具有較高的群延時數值
接著之前的討論,由于高音單元和低音單元之間的到達時間存在差異,可以在1000 Hz以上的頻率觀察到約為0.7 ms的正數群延時。這清楚地說明了高頻單元比低頻單元晚到0.7 ms。
紅色的群延時曲線在1 000 Hz以上的數值為0 ms。通過將紅色和黑色的群延時曲線以及脈沖響應圖進行對比,可以推測:在紅色曲線的測量過程中,DSP不僅做了有源分頻,還特意給低音單元額外加了一點延時,調整了高低音單元直達聲到達時間差的問題。
(2)紅色群延時曲線在低頻(低于100 Hz)的群延時數值更高
如果留意頻率響應,紅色曲線的振幅要比黑色曲線更高。這意味著DSP除了做分頻,調整揚聲器單元的時間差,還在低音單元的65 Hz左右進行了少量增益提升。
這個參量均衡的介入會增加群延時。再看圖18的紅色曲線,在將這只無源揚聲器的脈沖響應峰值移動至0 ms后,看到的相位響應變得更加平坦,然而這條平坦的相位曲線對于工程應用來說并無意義,它甚至將輸入信號的極性都反轉了。也許它在營銷領域能發揮些作用吧。
3 結語
本文討論的結論可以歸為一句話:通過正確的判斷和移除傳輸延時,才能獲得對工程應用有價值的相位響應。
-
功率放大器
+關注
關注
102文章
3602瀏覽量
132055 -
分頻器
+關注
關注
43文章
447瀏覽量
49997 -
IIR濾波器
+關注
關注
0文章
31瀏覽量
11559 -
傅里葉變換
+關注
關注
6文章
442瀏覽量
42645 -
TDS
+關注
關注
0文章
14瀏覽量
14402
發布評論請先 登錄
相關推薦
開環響應、環路響應、閉環響應與相位裕度關系淺析
什么是液晶電視可視角度
如何得到與觀察PID響應曲線
有源濾波器相位響應
請問一下運放單位增益響應曲線是否正常?能用不?
什么是可視角度
運放相位裕度的認識與理解
針對幅度響應設計的有源濾波器的相位響應介紹

頻率響應曲線增益案例摘要
理解脫扣曲線
有源濾波器中的相位響應

相位響應信號在系統中傳輸過程中的相位變化





 工商網監
工商網監
評論