

1.概述:
電力電子技術(shù)利用功率半導(dǎo)體及其電路實現(xiàn)電能變換與控制的技術(shù),在電能生產(chǎn)、傳輸、存儲、變換、控制的各個環(huán)節(jié)都有很多典型應(yīng)用。例如分布式發(fā)電系統(tǒng)與微電網(wǎng),超級電容器與電化學(xué)儲能系統(tǒng),電力諧波抑制與無功補(bǔ)償裝置,電機(jī)變頻調(diào)速系統(tǒng)等....系統(tǒng)與應(yīng)用繁多,又千差萬別,但它們有一個共同點,就是具有一定的功能。自身各部分互相依賴、互相制約。且系統(tǒng)本身按照人預(yù)定的要求控制設(shè)備,使之具有一定的狀態(tài)和性能。簡單介紹幾個常用系統(tǒng)并用mathcad搭建數(shù)學(xué)模型。
2.系統(tǒng)控制簡介:
根據(jù)自動控制理論,系統(tǒng)控制按其結(jié)構(gòu)可分為開環(huán)控制系統(tǒng)(被控量對系統(tǒng)沒有控制作用)、閉環(huán)控制系統(tǒng)(被控量直接或間接參與控制)。開環(huán)控制系統(tǒng)穩(wěn)定但精度低,閉環(huán)控制精度高但系統(tǒng)不穩(wěn)定可能會振蕩。這個問題最早在瓦特發(fā)明飛球調(diào)節(jié)器就引起人們注意。為了發(fā)揮開環(huán)與閉環(huán)控制的優(yōu)點,克服缺點一般同時使用開環(huán)與閉環(huán)控制。
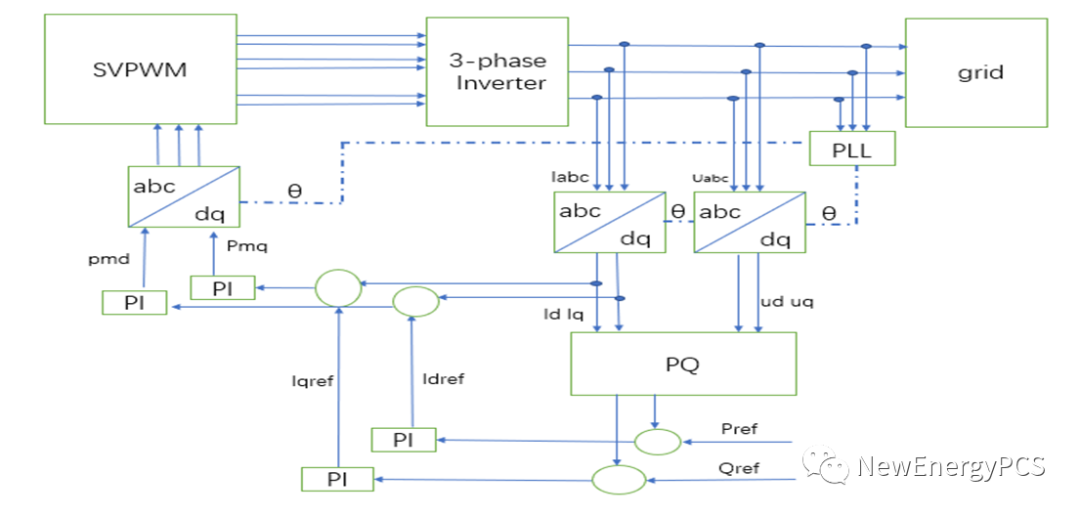
并網(wǎng)逆變器控制框圖
上圖是基于并網(wǎng)逆變器,以功率外環(huán)與電流內(nèi)環(huán)雙閉環(huán)為例的P Q控制典型基本控制框圖。框圖右邊輸入Pref,Qref兩個變量經(jīng)過PI控制器進(jìn)行反饋調(diào)節(jié),PI控制器輸出給反park、clarke模塊,坐標(biāo)變換模塊輸出abc給SVPWM模塊作用到三相逆變器,使逆變器的P有功功率和Q無功功率,均按其設(shè)定值輸出。而PI控制器的反饋量是電網(wǎng)功率與電流。其實現(xiàn)步驟大概如下:
- 采樣電網(wǎng)電壓與電流 Uabc Iabc ,用Uabc進(jìn)行鎖相(PLL)供坐標(biāo)變換用;
- 用Iabc Uabc通過clarke、park變換輸出UαUβIαIβ;
- UαUβ IαIβ給PQ瞬時功率計算模塊,計算輸出有功無功功率;
- 計算輸出功率與設(shè)定Pref,Qref的誤差與內(nèi)環(huán)電流給定值Iqref/Idredf
- Iqref/Idredf經(jīng)過PI控制器輸出與電網(wǎng)電流IαIβ比較計算誤差;
- 誤差再使用解耦和PI控制器實際會加限幅輸出控制系數(shù)Pmd qmd;
- Pmd qmd給SVPWM模塊作用到三相逆變器;
逆變器輸出設(shè)定的P有功功率和Q無功功率;
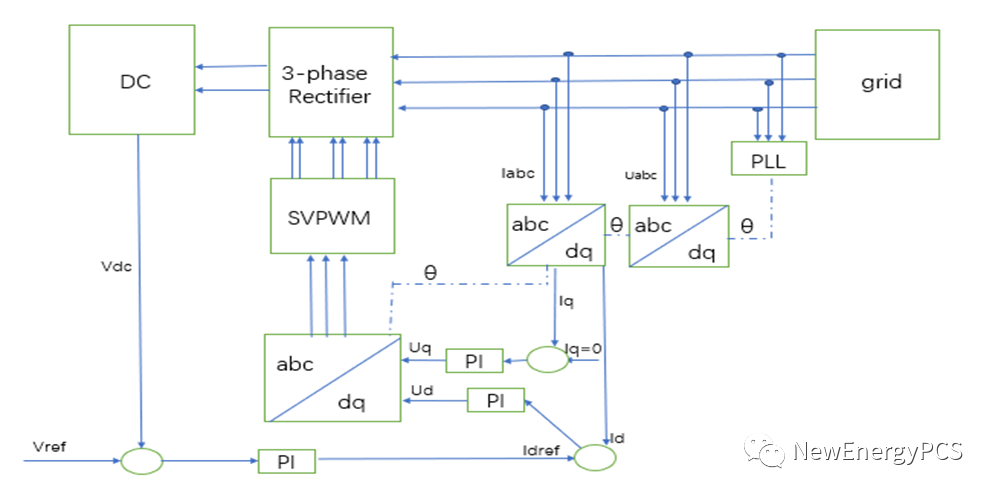
電壓型整流器控制框圖
上圖是基于電壓型PWM整流器。以電壓外環(huán)與電流內(nèi)環(huán)雙閉環(huán)為例的典型基本控制框圖。框圖左邊輸入Vref經(jīng)過PI控制器進(jìn)行反饋調(diào)節(jié),PI控制器輸出給交流電流內(nèi)環(huán)參考。電流內(nèi)環(huán)控制器輸出給反park、clarke模塊,坐標(biāo)變換模塊輸出abc給SVPWM模塊作用到三相整流器,使整流器直流母線電壓恒定,交流電流為給定幅值和相位的電流實現(xiàn)功率因數(shù)控制。而PI控制器的反饋量是直流側(cè)電壓與電網(wǎng)電流。其實現(xiàn)步驟大概如下:
- 采樣電網(wǎng)電壓與電流 UabcIabc 用Uabc進(jìn)行鎖相(PLL)供坐標(biāo)變換使用;
- 用Iabc通過clarke、park變換輸出IαIβ
- 采樣直流側(cè)電壓Vdc,計算與設(shè)定值Vref誤差與電流環(huán)參考值Idref
- Idref經(jīng)過PI控制器輸出與電網(wǎng)電流IαIβ比較計算誤差
- 誤差再使用解耦和PI控制器輸出電壓控制矢量Ud
- Iq設(shè)定值與電網(wǎng)無功電流Iq 計算誤差用PI控制器輸出電壓控制矢量Uq
- Ud Uq給SVPWM模塊作用到三相整流器
- 整流器輸出設(shè)定的Vdc和單位功率因數(shù)
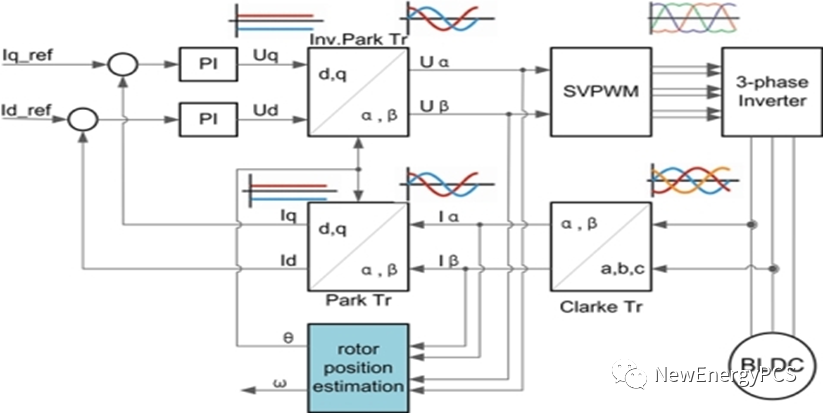
上圖是SVPWM空間矢量基于電機(jī)控制,以電機(jī)位置、速度與電流三閉環(huán)為例的典型基本控制框圖。框圖左邊輸入Iq_ref, Id_ref,兩個變量經(jīng)過PI控制器進(jìn)行反饋調(diào)節(jié) ,PI控制器輸出給反park變換(2r/2s)模塊,2r/2s模塊輸出UαUβ給SVPWM模塊作用到三相逆變器上進(jìn)而控制電機(jī)。而PI控制器的反饋量是電機(jī)電流采樣,其實現(xiàn)步驟大概如下:
電機(jī)三相電流Ia,Ib,Ic,因為Ia+Ib+Ic=0,所以實際采樣Ia,Ib。
- Ia,Ib,Ic經(jīng)過clarke變換為Iα Iβ。
- Iα Iβ經(jīng)過Park變換為Id,Iq。;
- 計算Id,Iq與Id_ref,Iq_ref的誤差。
- 將上述誤差輸入兩個PI控制器。得到輸出控制電壓Ud,Uq。
- Ud,Uq經(jīng)過反park變換輸出UαUβ。
- 將UαUβ與Iα Iβ輸入給電機(jī)位置和角度估算器,估算新的角度計算下個電壓矢量位置。
- 通過使用新的角度, 將PI控制器的輸出值逆變到靜止參考坐標(biāo)系。該計算將產(chǎn)生下一個正交電壓值Uα和Uβ。
- Uα和Uβ輸出給SVPWM模塊作用到三相逆變器上進(jìn)而控制電機(jī)。
-
鎖相環(huán)
+關(guān)注
關(guān)注
35文章
591瀏覽量
88292 -
SVPWM
+關(guān)注
關(guān)注
14文章
615瀏覽量
91243 -
三相整流器
+關(guān)注
關(guān)注
2文章
11瀏覽量
8827 -
并網(wǎng)逆變器
+關(guān)注
關(guān)注
2文章
107瀏覽量
16404 -
控制電機(jī)
+關(guān)注
關(guān)注
0文章
243瀏覽量
18504
發(fā)布評論請先 登錄
相關(guān)推薦






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論