 CAN總線在在物聯網和自動化領域廣受歡迎
CAN總線在在物聯網和自動化領域廣受歡迎
控制器局域網(CAN)總線起源于Robert Bosch GmbH,協議規范于1986年在汽車工程師協會(SAE)會議上正式發布。由英特爾和飛利浦生產的第一批CAN控制器芯片于1987年上市。1991年,梅賽德斯 - 奔馳發布了第一款基于CAN的多路復用布線系統的量產車。它是標準的汽車網絡,允許汽車大大減小線束的尺寸和重量。
CAN連接的替代品已被提出,但CAN還活著并且還在增長。事實上,它的用途正在遠遠超出汽車領域,進入工廠自動化和物聯網(IoT)等各種領域。CAN收發器是可以增強設計的眾多模擬構建模塊之一。你甚至可以稱他們為模擬英雄。
CAN總線類型
CAN 2.0A設備協議使用11位標識符,使用29位標識符的設備協議通常稱為CAN 2.0B。羅伯特·波什(Robert Bosh)仍然是領先的規格。根據維基百科,國際標準化組織于11898年發布了CAN標準ISO 1993,后來將其重組為兩部分。ISO 11898-1涵蓋數據鏈路層,而ISO 11898-2涵蓋高速CAN的物理層。ISO 11898-3 稍后發布,涵蓋了低速、容錯 CAN 的物理層。
SAE J1939標準是卡車和公共汽車廣泛使用的CAN協議標準。CAN總線是車載診斷(OBD)-II車輛診斷標準中使用的五種協議之一,該標準自1996年以來一直是在美國銷售的所有汽車和輕型卡車的強制性要求,自2001年以來在歐洲銷售。
CAN的替代品
CAN的替代方案包括本地互連網絡(LIN)總線和Flexray。LIN總線甚至比CAN便宜。LIN不是CAN總線的完全替代品,但在低成本至關重要且速度/帶寬不重要的情況下,LIN是一個很好的選擇。在汽車應用中,它通常用于對車輛性能或安全性不重要的子系統。Flexray自2000年以來一直在開發中,用于2006年生產的寶馬,現在用于大多數德國汽車和SUV。它支持更快的 10Mbps 數據速率和確定性的時間響應,并且設計為冗余。但是,它比CAN昂貴且復雜得多,并且只有24米的范圍。還有用于信息娛樂系統的MOST網絡。非常快速的以太網連接正在被提議用于汽車中的信息娛樂和顯示應用,甚至更多。
將CAN擴展到工業世界
豪華車有多達150個汽車ECU來控制和調節各種功能,現在每輛新車至少有70個ECU。這些ECU必須相互通信,同時控制動力傳動系,車身和底盤的幾乎所有方面。CAN將每個功能連接到各種ECU(從門鎖到制動器、油門踏板和尾燈)。它的受歡迎程度源于非常高的可靠性和簡單性——低成本和低功耗。
CAN總線使用簡單的25Kbps至1Mbps雙絞線連接。現在可以使用芯片來實現2Mbps數據。總線將以1000Kbps的速度達到50m,在40Mbps時達到1m。 CAN的車輛普及源于開發人員發現的優雅方式,以保證在具有安全意識的汽車環境中進行可預測的無差錯通信。這些特性也可以在工廠車間得到很好的利用。
CAN在一對電線上以差分方式傳輸。這種差分特性意味著CAN能夠抑制共模噪聲。該結構還減少了排放,因為差分通信的電場往往會相互抵消。
使用需要大電流來啟動、停止和運行的電機的工業系統就是一個很好的例子,說明CAN的亮點。電機的電磁輻射會導致RS-485或類似通信中的大量錯誤,而CAN能夠通過。除了物理可靠性之外,CAN還包括其他功能以確保魯棒性,包括循環冗余校驗(CRC)和支持錯誤檢測的確認。
作為總線拓撲運行需要設備了解何時可以傳輸。CAN使用載波檢測多址和碰撞檢測(CSMA/CD),也用于以太網。當設備想要傳輸其消息時,它必須感知總線是否空閑且未被使用。碰撞檢測允許它檢測總線上的另一個設備何時嘗試同時傳輸。CAN使用優先級機制進行總線管理。
隨著CAN總線變得非常流行,競爭供應商進行了不同的實現。每個實現都有不同的網絡層,即使物理層是通用的。CANopen旨在實現兼容性,以便設計人員可以選擇支持CAN的設備,并知道它們會相互作用。它在用于自動化應用的嵌入式系統中最受歡迎。在OSI模型方面,CANopen實現了上述層,包括網絡層。
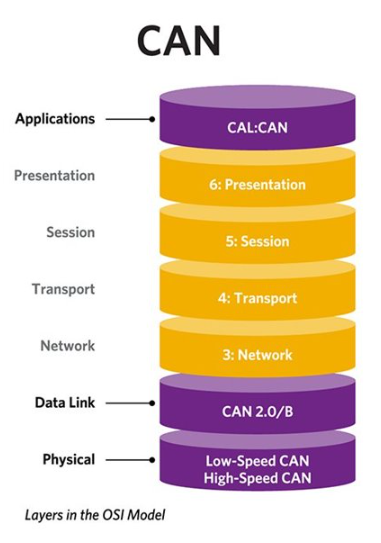
圖1.CAN總線的OSI層方案。
將CAN與RS-485進行比較
與RS-485等通信協議相比,CAN不僅為通信提供了物理介質,還提供了處理數據包(消息)所需的所有其他機制,避免數據沖突,檢測傳輸數據中的故障,自動重復受干擾的消息,并確保網絡中所有節點的數據一致性。此外,CAN指定數據幀的結構,包括消息標識符、數據和控制字節。RS-485連接僅尋址第1層(物理層),CAN還在OSI模型中添加第2層(數據鏈路層)。因此,CAN是一種實時兼容的解決方案。根據消息的ID優先級,可以預測每個CAN消息的最大延遲時間,而與總線負載或其他節點的性能無關。使用RS-485必須保證使用應用軟件避免碰撞。
CAN具有先進的錯誤管理功能。如果節點未正確接收消息(CRC 或格式錯誤),則收件人將通過錯誤幀銷毀該消息,并標記為對所有節點無效。此操作在CAN控制器中啟動自動重復。
CAN實施
這些措施共同采取(簡短消息、差分傳輸、錯誤檢測和故障排除、缺陷節點的撤出)使CAN成為一個非常強大、安全、可靠的網絡。這就是為什么CAN被用于車輛、船舶、電梯、醫療設備、飛機和工業工廠的許多關鍵或安全相關應用的原因。
由于CAN協議在硬件中的完全實現,微控制器系統的負載減少了(每條消息只有一個中斷)。許多供應商和幾乎所有可用的MCU都提供了各種第7層協議,如CANopen、DeviceNet和J1939,從而降低了風險并縮短了上市時間。
汽車應用顯然需要符合汽車級標準的IC。對于該領域以外的應用,例如前面提到的工業自動化和物聯網示例,這里有幾個很好的CAN收發器IC可以滿足這些應用需求。MAX3051為3.3V、1Mbps、低電源電流CAN收發器IC,主要用于不需要汽車行業規定的嚴格故障保護的應用。它具有四種操作模式:高速、斜率控制、待機和停機。在斜率控制模式下,發射器的壓擺率可以調節到高達500Kbps的數據速率。這減少了由端接不當的電纜引起的EMI和反射,并可能允許使用非屏蔽雙絞線。
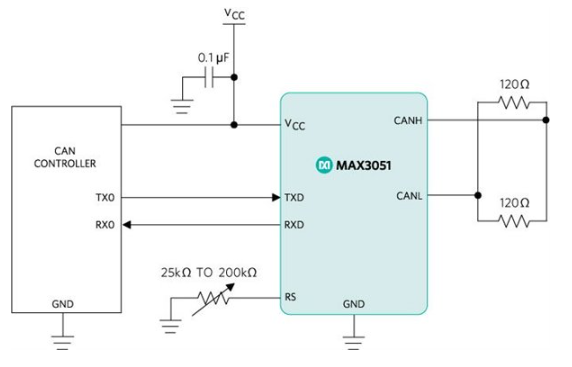
圖2.基本的MAX3051收發器電路。
MAX3051輸入共模范圍為-7V至+12V,超過ISO 11898規范。該器件采用 8 引腳 SO 和 SOT23 封裝,工作溫度范圍為 -40°C 至 +85°C。該芯片提供 ±12kV HBM ESD 保護、熱關斷和電流限制。
另一個值得注意的CAN收發器IC是MAX13054A。這款 2Mbps CAN 收發器具有高保護級別和 8 引腳 SO 封裝。它具有 ±65V 過壓故障保護,并集成了高 ±25kV ESD HBM 保護,以及 ±25V 的輸入共模范圍、短路保護和熱關斷。一個非常堅固的設備。
該芯片提供非常寬的1.62至5.5V邏輯電源范圍,以緩解接口困難。在待機模式下,發射器關閉,接收器切換到低電流/低速狀態。監視總線以檢測喚醒事件。待機模式僅需要 11μA 的電源電流。收發器包括一個顯性超時,以防止由控制器錯誤或TXD輸入故障引起的總線鎖定。大型網絡上的最大速度可能受到節點數量、布線類型或短截線長度的限制。芯片的溫度范圍為-40°至125°C,采用8引腳SOIC封裝(MAX13054AEASA+)。
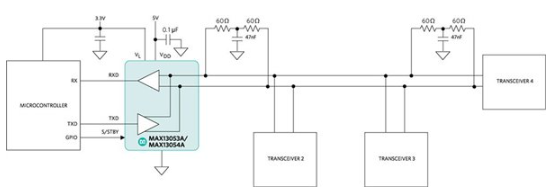
圖3.使用MAX13054A收發器的多點CAN總線。
MAX13054(無A后綴)有點不同。此版本完全兼容 ISO11898 標準,根據 IEC 8-61000-4 具有 ±2kV ESD 和 ±80V 故障保護。其他規格,包括封裝,與MAX13054A相似。它可用于汽車或擴展溫度范圍。
強大的CAN接口
仍然受到設計工程師的歡迎,這是有充分理由的。人氣還在增長。在可預見的未來,CAN總線將成為一股重要的力量,也是滿足各種應用領域許多通信需求的絕佳解決方案。
審核編輯:郭婷
-
控制器
+關注
關注
112文章
16398瀏覽量
178534 -
CAN
+關注
關注
57文章
2757瀏覽量
463914
發布評論請先 登錄
相關推薦







 工商網監
工商網監
評論