

傳統褲子傾斜變焦 (PTZ) 安全攝像機有節奏的掃蕩運動意味著它們并非萬無一失——入侵者在首先觀察其指向的方向后很容易溜過一個。此外,負責同時監控多個攝像機流的過度勞累的安保人員很容易錯過單個饋送中的場景變化。現代 PTZ 攝像機(圖 1)配備了傳感器和智能圖像處理器,能夠實時自主跟蹤物體,并可以自動提醒安保人員場景變化。但是,舊相機中使用的運動控制系統不再適合用途,并且無法支持此功能。本博客系列著眼于當今自主跟蹤PTZ攝像機的一些關鍵設計挑戰,并介紹了Trinamic電機控制解決方案可以解決這些問題的方法,從平穩和準確的運動要求開始。
PTZ 攝像機必須能夠水平(平移)和垂直(傾斜)移動,并改變其視野(縮放)。與固定攝像機相比,這些運動平面允許它們測量更廣泛的區域,但需要三個獨立的電機,每個電機必須提供:
平滑運動:如果電機沒有平穩地移動到其目標位置,則相機饋送將顯得生澀,使觀看者在電機的加速和減速階段難以觀察視頻流。
高精度快速跟蹤:電機必須快速精確地移動以跟蹤移動物體。否則,它可能會從視野中消失。
低振動和噪音:必須盡量減少振動,以防止整個攝像機晃動,從而難以查看觀察到的場景。噪音會干擾音頻信號,也可能提醒入侵者注意攝像機的存在。
傳統上,使用“恒定關斷時間”算法驅動的步進電機使相機能夠移動。然而,這種類型的算法會導致電流波形中出現明顯的轉矩紋波,并產生可聞的電機噪聲。現代步進電機使用微步進,每整步最多 256 微步,這意味著每轉一圈就有 51,200 微步。這使得相機移動更加平滑、安靜和精確,但對于MCU來說,以這種分辨率運行步進電機是很困難的。例如,要以每秒10轉的速度旋轉電機,所需的PWM輸出步進頻率為512000赫茲,并且很難找到一個微控制器來為多個電機執行此操作。
ADI Trinamic的展訊算法提供平滑、精確的運動
ADI公司的Trinamic團隊專注于運動控制解決方案,并開發了廣泛的先進技術來控制步進電機(和其他)的運動,包括基于硬件的電機驅動器和運動控制器。它們提供專用的硬件斜坡發生器,可用于產生高達 4 MHz 的步進頻率。這種方法減輕了主攝像頭微控制器的階梯配置文件生成,使其能夠專注于其他任務,如管理視頻饋送。
過去,使用梯形輪廓生成運動是很常見的。電機將不斷加速到定義的速度并保持它,直到達到恒定的減速階段。由這種突然的加速和減速引起的啟動和停止運動可以在攝像機的視頻饋送中看到。為了克服梯形算法引起的抖動問題,Trinamic 基于硬件的運動控制器使用了一種稱為 SixPoint 斜坡的更高級算法。這會在輪廓中引入兩個加速段和兩個減速段。添加輔助加速 (A1) 和減速 (D1) 段(圖1)可在攝像機行程的開始和結束時降低加速和減速,通過允許攝像機的電機更平穩地啟動和停止移動來提高視頻饋送的質量。
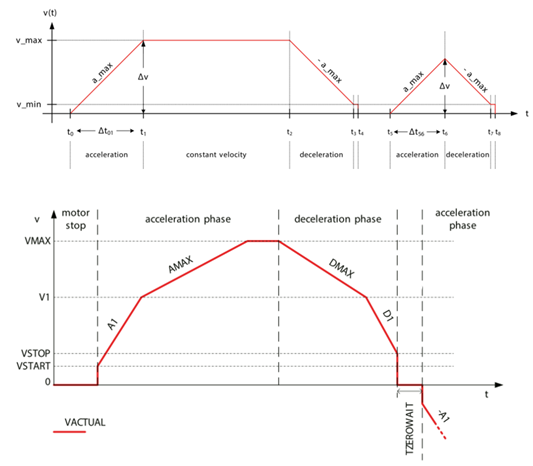
圖1 梯形與六點斜坡
電機驅動器的主要功能是產生使其旋轉所需的電流。驅動MOSFET必須以足夠的精度打開和關閉,以確保驅動器的電氣位置與電機的機械位置對齊。這種精確的切換可確保攝像機沿指令方向和速度移動。如果切換執行不正確,則電氣和機械位置之間的不匹配會導致能量浪費、不必要的噪音和抖動。極端不匹配(90度或更大)甚至會導致電機失速。
ADI Trinamic的SpreadCycle步進電機控制算法使用目標值周圍的遲滯來提供精確的驅動電流,確保電流正弦波在全步躍轉換時平滑過零。這很重要,因為整個步驟比微步驟具有更高的扭矩,如果執行不正確,可能會導致生澀運動。SpreadCycle消除了全步轉換時的抖動,是需要捕捉高速入侵者運動的攝像機的理想選擇!
審核編輯:郭婷
-
微控制器
+關注
關注
48文章
7840瀏覽量
153305 -
控制器
+關注
關注
114文章
16830瀏覽量
182172 -
攝像頭
+關注
關注
60文章
4926瀏覽量
97366 -
步進電機
+關注
關注
152文章
3145瀏覽量
148773
發布評論請先 登錄
相關推薦





 工商網監
工商網監

評論