 掌握指標使指定編碼器更簡單
掌握指標使指定編碼器更簡單
Richard Anslow and Michael Jackson
本文章介紹了編碼器為閉環控制電機應用帶來的好處,并探討了光學和磁性換能器的相對優缺點。介紹了關鍵的編碼器指標,并展示了如何在機器人拾取和放置應用程序中指定編碼器的性能級別。
從編碼器輸出派生的信息
為應用程序指定編碼器取決于它要提供的信息類型:
在通用伺服驅動器和速度控制系統中,編碼器的輸出信號用于獲取速度信息。速度是通過測量控制回路采樣周期內軸位置的變化來計算的。
在伺服、機器人和離散控制系統中,編碼器信號提供有關反饋回路中軸位置的信息。
編碼器還可以協助電機換向,確保電機繞組中的電流與來自轉子的旋轉磁場(來自磁鐵的旋轉磁場或感應電機中的感應磁場)具有正確的相位關系。
關鍵編碼器性能指標
掌握關鍵性能指標對于正確的編碼器規格至關重要。其中包括:
分辨率:電機軸單次 360 度旋轉中唯一可識別的位置(代碼)的數量。通常,最高分辨率編碼器使用光學換能器,而中分辨率/高分辨率編碼器使用磁換能器。旋轉變壓器(一種旋轉變壓器)或霍爾傳感器適用于需要中低分辨率的應用。 高分辨率應用通常選擇 16-24 位編碼器,13-18 位編碼器提供中等分辨率,而 12 位(或更低)編碼器提供低分辨率。
可重復性:衡量編碼器返回相同命令位置的一致性,是需要精確、重復運動的應用(如機器人或拾取和放置機器)的關鍵性能指標。
絕對精度:單軸旋轉的實際位置與報告位置之間的差異。它類似于數據轉換器的積分非線性(INL)。絕對精度在位置控制應用中至關重要。
差分精度:量化軸旋轉時兩個相鄰代碼之間報告的距離差異,是速度控制應用中的基本指標。
如何為拾取和放置機器人指定編碼器
拾取和放置機器人是食品包裝和半導體制造行業的常規功能。在此應用中,高精度和可重復性對于確保過程效率至關重要,而使用高性能電機編碼器可以幫助實現這一目標。在圖 2 中,電機通過精密減速齒輪箱驅動機械臂中的每個關節。使用精密電機安裝的軸角編碼器 (m) 測量接頭角度,有時也使用額外的臂式編碼器 (j) 測量接頭角度。
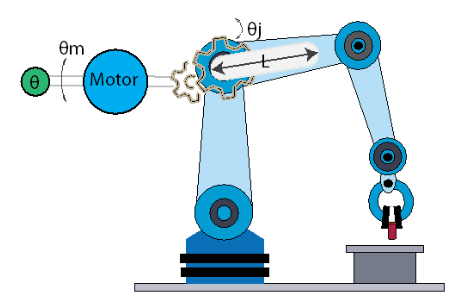
圖1 電機編碼器(m)和關節編碼器(j)與機器人伸展(L)的角度重復性
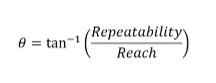
在這里,可重復性是最關鍵的數據表性能指標,通常在亞毫米級指定。了解可重復性和機器人伸展范圍后,可以使用以下公式計算旋轉編碼器規格:
由于多個關節有助于機器人系統的整體范圍,因此所選編碼器必須表現出超過目標角度精度的性能。每個接頭的重復性規格應按 10 倍(典型值)縮放,而齒輪箱比率 (G) 決定了電機編碼器的可重復性。對于表 1 中描述的示例機器人系統,關節編碼器需要 20 到 22 位的重復性規格,而電機編碼器需要 14 到 16 位的分辨率。
| 機器人系統 | 機器人 1 | 機器人 2 | |
| 假設齒輪比, | 100 | ||
| 重復性規格 | ±0.05毫米 | ±0.01毫米 | |
| 伸展,L | 1.30米 | 1.10米 | |
|
編碼器 重復性規格 |
0.0022° | 0.0005° | |
| /101 | 0.00022° (~20 位) | 0.00005° (~22 位) | |
| 0.02° (~14 位) | 0.005° (~16 位) | ||
| 1每個編碼器必須提供 10 倍的精度才能實現整體系統精度,因為多個接頭有助于總范圍。 | |||
表1 指定拾取和放置機器人的編碼器
審核編輯:郭婷
-
編碼器
+關注
關注
45文章
3651瀏覽量
134772 -
電機
+關注
關注
142文章
9044瀏覽量
145793 -
換能器
+關注
關注
8文章
347瀏覽量
29552
發布評論請先 登錄
相關推薦
什么是編碼器 什么叫編碼器 編碼器什么意思
PCM編碼器,PCM編碼器是什么意思
圖文解析拉線編碼器的裝配
絕對值編碼器日常維護與保養方法
拉線盒式編碼器的基本結構和現場安裝注意事項
關于旋轉編碼器在電路中的應用
旋轉編碼器能直接換嗎_旋轉編碼器更換注意事項

磁性編碼器和光電編碼器的比較
編碼器原點設定方法 | 編碼器原點丟失怎樣找回
編碼器好壞怎么判斷,編碼器原理
編碼器零點位置怎么看 | 編碼器零位怎樣確定

絕對式編碼器的工作原理

怎么看編碼器上的參數?

AGV輪轂電機中的編碼器






 工商網監
工商網監
評論