") 激光雷達(dá)不同類型介紹
激光雷達(dá)不同類型介紹
如今,激光雷達(dá)已被廣泛應(yīng)用于機(jī)器人、無人駕駛、AR/VR、3D打印等多個(gè)領(lǐng)域,根據(jù)應(yīng)用領(lǐng)域的不同,激光雷達(dá)的類型也存在一定差異,機(jī)器人是目前激光雷達(dá)應(yīng)用最為火熱的領(lǐng)域之一,按照不同的技術(shù)路線,可將機(jī)器人激光雷達(dá)分為TOF激光雷達(dá)及三角測(cè)距激光雷達(dá)兩大類型。
TOF激光雷達(dá)
TOF激光雷達(dá)是一種進(jìn)行光飛行的時(shí)間的測(cè)量方法,顧名思義就是發(fā)射出一道激光,然后會(huì)有一種二極管來進(jìn)行激光的回波檢測(cè),再使用一個(gè)很高精度的計(jì)時(shí)器去測(cè)量光波發(fā)射到目標(biāo)物引起反饋再回來的時(shí)間差,而光速具有不變性,再將時(shí)間差乘以光速便可得到目標(biāo)物體的距離。
對(duì)于TOF的測(cè)距原理,如果再加以細(xì)分,還可再分為脈沖式及相位式兩種。
脈沖式比較簡(jiǎn)單直接,就是發(fā)出一道激光的脈沖,然后再檢測(cè)激光的相關(guān)信息。這個(gè)是目前TOF激光雷達(dá)采用的主流方式。
相位式則是連續(xù)的發(fā)射激光。但是接收到的回波信號(hào)會(huì)由于光速傳播的特性,相位上會(huì)有差距。當(dāng)檢查相位時(shí)就可以轉(zhuǎn)過來處理這個(gè)距離。這種方式的優(yōu)勢(shì)在于成本相對(duì)更低,但其主要問題是測(cè)量的速度沒法提高。
現(xiàn)下較熱的VP300激光雷達(dá)便采用了脈沖式TOF測(cè)距原理,其配合深圳不止技術(shù)研發(fā)的高速激光采集芯片,能進(jìn)行每秒10KHZ的測(cè)距動(dòng)作,在測(cè)距過程中,vp300將發(fā)射經(jīng)過調(diào)制的紅外激光信號(hào),該激光信號(hào)在照射到目標(biāo)物體后產(chǎn)生的反光將被 vp300 的激光采集系統(tǒng)接收,然后經(jīng)過嵌入在 VP300 內(nèi)部的DSP處理器實(shí)時(shí)解算,被照射到的目標(biāo)物體與 vp300 的距離值以及當(dāng)前的角度信息將從通訊接口中輸出。

基于TOF原理的vp300激光雷達(dá),目前可實(shí)現(xiàn)70米的測(cè)距距離,同時(shí)也是業(yè)內(nèi)功耗較低的激光雷達(dá)之一,即使在遠(yuǎn)距離物體條件下,這款TOF激光雷達(dá)也能保證測(cè)量的精度不發(fā)生改變,同時(shí)在室外及更大場(chǎng)景中,其性能依舊穩(wěn)定。
三角測(cè)距激光雷達(dá)
三角測(cè)距激光雷達(dá)是一種基于圖像處理的方法,就像我們給人拍照,人距離相機(jī)的遠(yuǎn)近會(huì)決定TA在成像里的大小,這就是三角測(cè)距的一種原理應(yīng)用。像connect體感攝像頭,Intel研發(fā)的RealSense都會(huì)使用到三角測(cè)距法,三角測(cè)距法采用了一種特制的攝像頭,能拍攝出激光的光斑的特性,從而能反推出距離。
相比TOF激光雷達(dá),三角測(cè)距激光雷達(dá)的成本會(huì)有很大降低,本質(zhì)上來說就是一個(gè)攝像頭加一個(gè)處理芯片。當(dāng)然三角測(cè)距激光雷達(dá)也有一些缺點(diǎn),它會(huì)有分辨率的限制,如分辨率不高,物體又較遠(yuǎn),可能會(huì)出現(xiàn)看不清的情況,同理,三角測(cè)距法對(duì)于遠(yuǎn)距離的物體來說,便會(huì)看的不是很清楚,所以對(duì)算法具有很高挑戰(zhàn)。如果算法不夠優(yōu)秀,即使測(cè)量四五米開外的物體就會(huì)出現(xiàn)問題。
上表是詳細(xì)對(duì)比,實(shí)際上來說,TOF(Time of Flight)方法在性能上比較占優(yōu),但成本相對(duì)更高。而三角測(cè)距法則相反,在成本上,它是一種非常占優(yōu)的方案。但是其缺點(diǎn)在于如果軟件的復(fù)雜度不夠高,在進(jìn)行遠(yuǎn)距離的測(cè)量的時(shí)候,性能就會(huì)下降得特別快。
下圖可作為具體解釋:
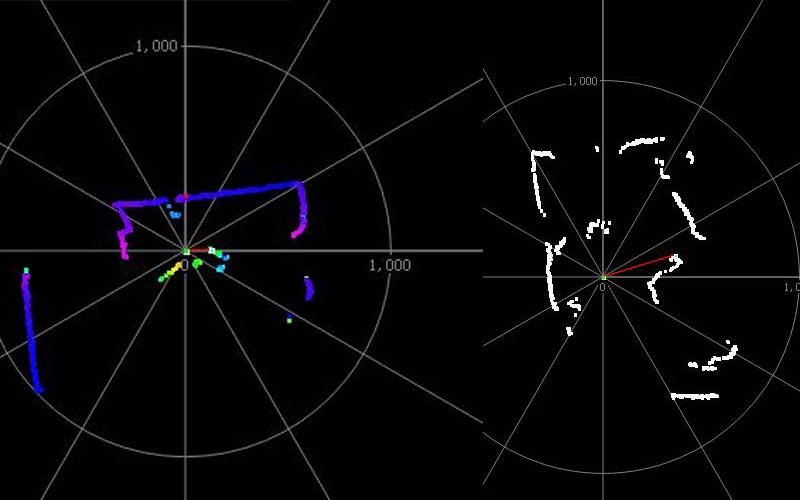
我們看到,在這個(gè)畫面中,右邊這張圖顯示的就是,算法寫的不好或者是說比較傳統(tǒng)的激光雷達(dá),它在測(cè)量遠(yuǎn)距離的物體時(shí),明明應(yīng)該是一個(gè)筆直的墻體,但是它掃描出來的效果就會(huì)有很多類似鋸齒狀的馬賽克的感覺,給后期的算法處理上帶來了很多障礙。
而左圖是深圳不止技術(shù)使用的算法。該算法能使激光在遠(yuǎn)距離情況下依舊做的非常遠(yuǎn),實(shí)際上三角測(cè)距的激光雷達(dá)存在的一個(gè)主要的制約技術(shù)門檻,就在于算法的優(yōu)秀性。經(jīng)過長時(shí)間的迭代優(yōu)化,目前深圳不止技術(shù)的VP300Dtof激光雷達(dá)已能達(dá)到50米的測(cè)距范圍,

-
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
4002瀏覽量
190131 -
激光雷達(dá)原理
+關(guān)注
關(guān)注
2文章
22瀏覽量
3235 -
脈沖激光雷達(dá)
+關(guān)注
關(guān)注
0文章
23瀏覽量
3147 -
激光雷達(dá)芯片
+關(guān)注
關(guān)注
1文章
8瀏覽量
3093 -
激光雷達(dá)系統(tǒng)
+關(guān)注
關(guān)注
0文章
42瀏覽量
2770
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
一則消息引爆激光雷達(dá)行業(yè)!特斯拉竟然在自研激光雷達(dá)?
全場(chǎng)景適用!TS Spectrum高速數(shù)字化儀在激光雷達(dá)系統(tǒng)中的應(yīng)用
激光雷達(dá)會(huì)傷害眼睛嗎?

激光雷達(dá)的維護(hù)與故障排查技巧
激光雷達(dá)技術(shù)的基于深度學(xué)習(xí)的進(jìn)步
激光雷達(dá)技術(shù)的發(fā)展趨勢(shì)
TS高速數(shù)字化儀在激光雷達(dá)系統(tǒng)中的應(yīng)用
光學(xué)雷達(dá)和激光雷達(dá)的區(qū)別是什么
激光雷達(dá)點(diǎn)云數(shù)據(jù)包含哪些信息
一文看懂激光雷達(dá)

基于FPGA的激光雷達(dá)控制板

硅基片上激光雷達(dá)的測(cè)距原理

激光雷達(dá)的探測(cè)技術(shù)介紹 機(jī)載激光雷達(dá)發(fā)展歷程

激光雷達(dá)LIDAR基本工作原理






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論