

引言
全球1.17億個湖泊中,有一半以上的湖泊間歇或長期被湖冰所覆蓋。湖冰不僅是冰凍圈的重要組成部分,也是區域乃至全球氣候的指示器。湖冰季節性特征顯著,能夠直觀反映出氣溫的變化。已有研究表明長時間序列的湖冰觀測數據可作為代用氣候記錄。另一方面,隨著湖冰的變化,湖泊表面的反射率等屬性也會發生變化,進而影響湖泊和大氣的物質和能量交換,加劇氣候變化。
通過“WebofScience”核心數據庫,對檢索主題為“lakeice”的2000-2021年間的論文數量、被引頻次(圖1)

圖1 2000-2021年期間以“lake ice”為主題的SCI論文數量及被引頻次
隨著不同遙感傳感器技術的迅速發展及各類遙感數據源的獲取更加便捷,湖冰遙感監測研究已發展了大量不同監測技術和參數反演方法;并且,不同的學者開展湖冰研究所針對的湖泊對象、研究時段等都不一致,有必要匯總現有代表性研究結果,形成湖冰參數及變化特征在更宏觀時空尺度上的科學認識和理解。本文在充分整理已有文獻的基礎上,總結了湖冰遙感監測的數據源發展,再從湖冰范圍、物候、冰厚三個方面闡述遙感監測或參數反演方法,最后通過對文獻的總結,探討當前湖冰研究熱點區域的湖冰變化趨勢及影響因素。
湖冰監測遙感數據源發展狀況
2.1 湖冰監測遙感衛星發展
遙感從20世紀70年代開始應用于湖冰監測,主要方式大致可以分為兩大類:光學遙感和微波遙感。光學遙感是接收地面反射太陽能量的被動式系統,因此受云層的限制較大,在云層較厚和極夜情況下無法使用;微波受天氣狀況的影響較小,對云層具有一定穿透能力,可以全天候地對地表進行監測,是常年多云地區的湖冰監測的重要手段。
2.1.1光學遙感
光學遙感主要通過地物的反射光譜來區分地物,是確定冰蓋存在的重要工具。隨著國產衛星的不斷發展,天宮二號、高分系列衛星等也越來越多的應用于湖冰遙感監測中,GF-1和GF-6衛星的多光譜空間分辨率為16m,二者結合部分地區的重訪周期可達2-4天。
2.1.2微波遙感微波
遙感又分為被動微波遙感和主動微波遙感,前者測量物體熱輻射,用亮溫值來度量地物屬性,后者通過發射電磁波獲取地物后向散射系數來探測地物屬性。與水體相比,冰的亮溫值和后向散射系數值都較高,且均隨著冰厚的增加而增加。因此,利用水體和冰的亮溫與后向散射差異,可以獲取湖冰物候和冰厚信息。
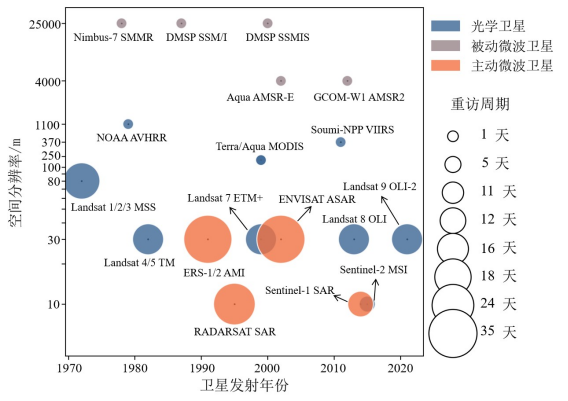
圖3 湖冰監測研究中常見的遙感衛星
常用于湖冰監測的被動微波傳感器包括SMMR、SSM/I、AMSR-E/2和MWRI等。被動微波數據雖然可以達到每日重訪,但空間分辨率都比較低(部分25000m),岸線混合像元對湖冰識別精度影響較大,一般只適用于大型湖泊(比如>500km2)的湖冰監測。主動微波遙感主要傳感器類型包括側視真實孔徑雷達(SLAR)、合成孔徑雷達(SAR)、散射計及雷達高度計(RA)。其中,SAR是最常見的主動微波傳感器,在過去50年里,70%的主動微波湖冰產品都使用了SAR數據。隨著SAR的不斷發展,也有學者使用SAR數據進一步研究湖冰類型、粗糙度、氣泡含量等冰結構。1987年前,利用主動微波遙感進行的湖冰監測研究是基于SAR數據的X波段,隨著歐空局(ESA)ERS-1衛星的發射,C波段SAR數據受到越來越多學者的青睞。利用C波段SAR遙感可以很容易地檢測到湖水凍結,且對提取湖冰物候信息的準確性較高。主動微波遙感數據重訪周期較長,不適合獨立應用于湖冰物候監測研究。
2.2 其他遙感數據源
發展野外實地探測時,在湖泊薄冰區域直接搭建儀器作業會有一定的危險性,利用航空遙感平臺監測是安全有效的方法。航空遙感搭載體積小、成本低、連續性強的探地雷達系統(GPR)在大范圍平坦冰面的冰厚監測中發揮著重要作用。早期的航空遙感采用飛機和直升機載人操作使用側視機載雷達觀測了阿拉斯加北坡湖冰。但直升機飛行前需要經過嚴格的審批,投入大量的時間與成本。無人機(UAV)的發展為航空遙感提供了新的途徑。無人機有機動性強、事故率低、操作靈活、探測區域受限制小等優點,與探地雷達結合可以更好地發揮二者優勢。常用的輕小型無人機測繪遙感飛行平臺包括固定翼、旋翼和無人直升機等。衛星遙感冰厚監測在精度及適應性上還存在局限性,但機載雷達觀測數據可為湖冰厚度遙感反演與模擬提供可靠的驗證數據。
湖冰識別與湖冰物候、冰厚遙感監測研究進展
3.1 湖冰遙感識別方法
3.1.1遙感影像目視解譯
目視解譯時可以通過波段組合的方式來突出顯示水體和冰面的差異。如對Landsat8影像按照波段(Band-5/6/2)進行RGB假彩色合成:由于水體對可見光波段的強吸收作用,在湖泊未結冰之前,水體顏色呈黑色,水陸邊界明顯;而封凍時冰面呈現紫色,紋理特征明顯,隨著冰厚的增加,冰面顏色也由淺紫色向深紫色過渡。正是水體和冰面顏色、紋理等特征的差異,目視解譯才可以很好的將水體和冰面區分開。
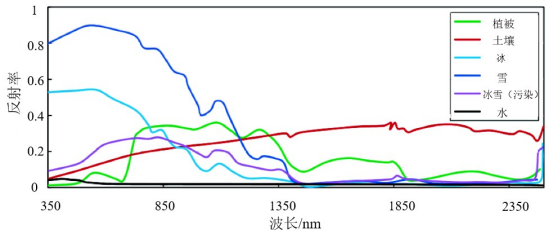
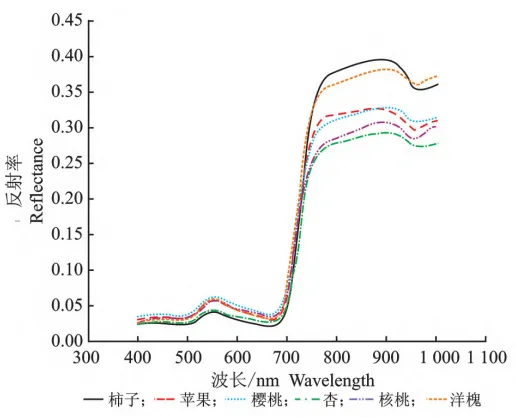
圖4 冰、水以及其他主要地物的光譜反射率曲線圖
3.1.2單波段/遙感參量閾值法
單波段/遙感參量閾值法利用單一波段或遙感參量的反射率、亮溫或后向散射系數的差異來直接區分水和冰。由于水體在近紅外波段的反射率較低,在700nm以后反射率降低至幾乎為0;而冰在350-850nm波段仍有較高的反射率,且隨著波長的增加反射率逐漸降低。利用水和冰在近紅外波段反射率的差異,在晴朗無云的情況下,可以對二者較好的進行區分:設定閾值a,當近紅外波段的反射率大于a時,則認為該像元為冰。除此,由于水和冰的熱力差異,利用亮溫數據也可以區分湖冰和水體。湖冰后向散射系數比水體高,也可以用于較準確的冰水區分。
3.1.3多波段/遙感參量指數閾值法
多波段/遙感參量指數閾值法是利用水和冰在多個波段或遙感參量的特征差異來構建遙感指數間接提取湖冰的方法。歸一化差值積雪指數NDSI是最常用的指數,由綠光波段和短波紅外波段反射率計算得到,可以有效地減少植被、建筑陰影等噪聲對湖冰監測帶來的影響(魏秋方和葉慶華,2010),以MODIS傳感器數據為例,NDSI的計算公式(1)如下:
NDSI=(Band4-Band6)/(Band4+Band6)(1)
式中:Band4為MODIS數據第4波段(綠光)反射率值;Band6為MODIS數據第6波段(短波紅外)反射率值。魏秋方提出了改進的歸一化差值積雪指數MNDSI,由近紅外波段和短波紅外波段反射率計算得到。這樣改進的MNDSI在計算水體和冰面時結果反差比NDSI要明顯,更有利于區分水體和冰面。MNDSI的計算公式(2)如下:
MNDSI=(Band2-Band6)/(Band2+Band6(2)
式中:Band2為MODIS數據第2波段(近紅外)反射率值;Band6為MODIS數據第6波段(短波紅外)反射率值。閾值法還有一種基于被動微波遙感亮溫數據的指數,由海冰密集度計算方法演變而來,是用極化比PR和頻率梯度GR之比來區分水體和冰面,計算公式(3),(4)如下:
PR=(TB19V-TB19H)/(TB19V+TB19H)(3)
GR=(TB37V-TB19H)/(TB37V+TB19H)(4)
式中:TB19V、TB19H、TB37V分別表示19GHz垂直、水平和37GHz垂直極化亮溫值。依據遙感數據源與湖泊所在區域的不同,分類閾值不一定相同,通常是設定一個初始閾值,并以0.0001遞增/遞減試錯,最終得到最佳閾值。初步閾值的設定可以參考閾值法識別湖冰的相關文獻:紅光波段反射率>0.1,近紅外波段反射率>0.05,紅光波段反射率-近紅外波段反射率>0.01,亮溫數值<3.8,NDSI>0.15。
3.1.4機器學習方法
傳統的機器學習法識別湖冰的方法是通過對遙感影像進行目視解譯,選取典型的湖冰和水體像元建立訓練樣本集,再選擇合適的分類器對影像進行分類和湖冰像元的提取。王瓊等基于支持向量機(SVM)分類對色林錯湖區的湖冰進行提取,發現支持向量機對于湖冰提取相對傳統方法具有更顯著的優勢,總體分類精度在88.58%以上;隨機森林(RF)分類也常用于區分水和冰,相較于單波段閾值法和多波段指數閾值法提取精度更高,分類精度為0.9965,驗證精度為0.8072。Wu等評價了多個機器學習分類器的湖冰分類精度,包括MLR(多項邏輯回歸分析)、SVM、RF、GTB(梯度提升樹),其中RF和GTB的分類總體精度都達到了98%及以上,且RF對超參數的選擇相對不敏感,有較大潛力用于提取大尺度湖冰分布范圍。
隨著人工智能技術的發展與突破,基于深度學習的湖冰遙感識別受到廣泛關注。這種方法將湖冰檢測視為二分類語義分割問題,通過卷積操作提取影像特征,進行湖冰分類,利用深度卷積網絡的湖冰識別模型的平均交并比MIoU指標在90%以上。Ma等結合卷積神經網絡和條件隨機場,通過遙感影像探測湖水的凍結狀態,平均總體精度達到93.10%,且對于小型湖泊有很好的應用效果。
3.1.5湖冰遙感識別方法
比較遙感影像目視解譯法識別湖冰雖然有較高的精度,但需要依靠人為主觀的經驗進行判斷,且湖泊眾多,遙感數據量巨大,難以實現批量化、定量表達。因此現代的湖冰遙感監測以計算機自動化解譯方式為主,目視解譯主要應用于檢驗階段。相對而言,機器學習方法具有高度智能化和分類自動化的優勢,但機器學習模型用于冰面識別方法目前大多應用于海冰識別。現有湖冰遙感識別研究主要以單波段/遙感參量閾值法和多波段/遙感參量指數閾值法為主。
單波段/遙感參量閾值法操作簡單,根據需求選定適合的判別因子即可,重點和難點在于閾值的確定,其大小將直接影響湖冰提取結果的精度。多波段/遙感參量指數閾值法的閾值較易確定,但會有少量云被誤分的情況。一般而言,只用單個波段或數據進行湖冰監測,可能無法消除大氣影響和系統誤差,提取結果精度較差,單閾值法只是湖冰監測方法的一部分,結合多個閾值方法的效果更好。
在利用光學遙感數據監測湖冰方面,孫皓等選定紅光波段和近紅外波段之差和紅光波段值閾值,對喜馬拉雅山北坡四個典型湖泊的湖冰進行提取;基于長期地表溫度,Nonaka等利用溫度閾值來監測湖冰消融日期;NSIDC基于MODIS傳感器數據利用NDSI指數閾值法創建的MOD10A1/MYD10A1冰雪產品。對于微波遙感數據,監測湖冰常用閾值法通常是基于后向散射系數和亮溫值數據,或利用PR和GR之比來區分水體和冰面。
3.2 湖冰物候遙感監測
湖冰物候主要包括四個關鍵時間節點:湖面開始結冰的時間點——開始凍結時間FO;湖面首次出現全部凍結的時間點——完全凍結時間FU;湖冰開始融化的時間點——開始消融時間BO;湖冰完全融化的時間點——完全消融時間BU。由這四個時間節點可以進一步推算湖冰冰期DI(開始凍結和完全消融時間之間的長度)和湖冰完全封凍期DCI(完全凍結和開始消融時間之間的長度)。
湖冰物候遙感監測一般是按照湖冰覆蓋占湖泊總面積的比值來確認湖冰物候特征參數。隨著湖面溫度的下降,湖水由淺水岸邊結冰,在新生湖冰形成的過程中,可能會被強風或突然的升溫打斷。為了避免這種偶然情況和湖岸邊混合像元的影響,一些學者將湖冰面積占湖泊面積比例超過5%時刻定義為開始凍結時間,湖冰面積占湖泊面積95%時刻定義為完全凍結時間。還有一些學者將該閾值分別調整至10%和90%。提取湖冰物候信息首先是確定遙感數據源,結冰時湖冰范圍每天都在變化,同時云層遮擋也會對湖冰物候監測產生一定的影響,因此研究要求高時間分辨率的遙感數據源,影像去云及填充是數據預處理的關鍵步驟。
可以結合同一天的其他遙感數據源或上下期影像對被云層覆蓋的范圍進行判斷:對于像素A,如果在同期的其他遙感數據中是水體(或其他類型如冰,下同),則該影像中像素A可確定為被水覆蓋;如果日期t的一個像素A被云覆蓋,則通過上一期及下一期影像判斷,若上下兩期都被水覆蓋,則確定日期t的A像素被水覆蓋。再利用上文介紹的湖冰識別方法提取湖冰信息,確定湖冰面積,計算湖冰占湖泊總面積的比值K,繪制該年份K值曲線,閾值線與K值曲線的交點即為物候信息的時間節點。
湖冰物候監測方法可基于不同的數據源:光學遙感數據中MODIS傳感器數據因其每日的重訪問周期而最為常用,輔以高空間分辨率的影像數據來驗證提取的準確性;微波遙感數據如微波亮溫數據通常生成時間序列,通過閾值法在時間序列上提取湖冰物候,如滑動t檢驗MTT閾值法可以有效的提取湖冰物候信息,檢查時間序列上的每個點前后一段時間內的亮溫數據是否有顯著差異,獲取突變點作為判斷湖冰變化情況的依據;已有的冰雪產品可以直接計算湖冰面積變化;有學者基于AMSRE和AMSR2建立了2002-2015年北半球湖冰物候數據集,利用此數據集也可獲得湖冰物候信息。
推薦:
便攜式地物光譜儀iSpecField-NIR/WNIR
專門用于野外遙感測量、土壤環境、礦物地質勘探等領域的最新明星產品,由于其操作靈活、便攜方便、光譜測試速度快、光譜數據準確是一款真正意義上便攜式地物光譜儀。

無人機機載高光譜成像系統iSpecHyper-VM100
一款基于小型多旋翼無人機機載高光譜成像系統,該系統由高光譜成像相機、穩定云臺、機載控制與數據采集模塊、機載供電模塊等部分組成。無人機機載高光譜成像系統通過獨特的內置式或外部掃描和穩定控制,有效地解決了在微型無人機搭載推掃式高光譜照相機時,由于振動引起的圖像質量較差的問題,并具備較高的光譜分辨率和良好的成像性能。

便攜式高光譜成像系統iSpecHyper-VS1000
專門用于公安刑偵、物證鑒定、醫學醫療、精準農業、礦物地質勘探等領域的最新產品,主要優勢具有體積小、幀率高、高光譜分辨率高、高像質等性價比特點采用了透射光柵內推掃原理高光譜成像,系統集成高性能數據采集與分析處理系統,高速USB3.0接口傳輸,全靶面高成像質量光學設計,物鏡接口為標準C-Mount,可根據用戶需求更換物鏡。

審核編輯黃宇
-
傳感器
+關注
關注
2558文章
52008瀏覽量
760581 -
監測
+關注
關注
2文章
3785瀏覽量
45149 -
遙感
+關注
關注
0文章
250瀏覽量
17023 -
機器學習
+關注
關注
66文章
8472瀏覽量
133731
發布評論請先 登錄
相關推薦
石墨烯鉛蓄電池研究進展、優勢、挑戰及未來方向
中山大學:在柔性觸覺傳感電子皮膚研究進展
高能點焊電源技術在現代工業制造中的應用與研究進展

表皮可穿戴光學傳感器在汗液監測領域的研究進展綜述

上海光機所在多路超短脈沖時空同步測量方面取得研究進展
AI大模型的最新研究進展
中國科學院西安光機所智能光學顯微成像研究取得新進展
從哪些角度選擇高光譜遙感成像光譜儀?這些廠家比較有實力!
基于無人機遙感的作物長勢監測研究進展

導熱紙(膜)的研究進展 | 晟鵬技術突破導熱芳綸紙

基于無人機高光譜遙感的荒漠化草原地物分類研究1.0
iSpecField-HH手持式地物光譜儀:野外遙感環境監測的利器

iSpecField-NIR便攜式地物光譜儀:多領域應用的高效工具

基于無人機高光譜遙感的太行山經濟林樹種識別研究1.0
哈爾濱工業大學在微納光學領域取得重要進展





 工商網監
工商網監

評論