 埃夫特工業機器人ER-Factory基本操作流程
埃夫特工業機器人ER-Factory基本操作流程
1.鼠標操作和鍵盤操作
1.1、鼠標中鍵點擊后移動鼠標,視角旋轉;
1.2、滾動鼠標中鍵,進行視角的縮放;
1.3、左鍵點擊三維環境中的物體,表示選中該物體進行下一步操作;
1.4、左鍵選中物體,再右鍵,顯示“移動操作坐標系”,在此時的狀態下,才可以對三維環境中的物體進行移動布局;
1.5、在三維環境的空白處雙擊鼠標左鍵,可將坐標系轉換成 World,雙擊對象自身,坐標系會轉換為其點擊部分的自身坐標系;
1.6、選中對象后,按下鍵盤上的“Space/空格鍵”,會隱藏當前選中對象,再按一次,又可顯示出來;
1.7、快捷鍵:“Critl+M”打開“示教 Machine”對話框;“Critl+N”打開“手動示教”對話框;“Critl+F”放大。
注意:
(1)鼠標的選擇方式有四種:None、By Pick、By Pick Box、By PickDynamic,在三維環境中的空白處右鍵,彈出對話框,在“Selected By Mouse”中可進行幾種鼠標選擇方式的切換;
(2)“By Pick”鼠標在三維環境中會顯示為一個“白色的正方形”,在這個鼠標選擇方式下,才可以選中物體,從而進行移動。
2.移動操作
簡單移動
2.1、選中要移動的對象,右鍵,出現“移動操作坐標系”,可通過手動拖動“移動操作坐標系”或者在“移動操作”面板中直接輸入坐標值來到達目標位置;
2.2、“移動操作坐標系”紅色為 X 軸,綠色為 Y 軸,藍色為 Z 軸,當選中哪個軸拖動時,相應選中的軸會變成黃色;
注意:
(1)選中移動對象后右鍵打開的“移動操作坐標系”出現的位置是其自身的 BasePoint 的位置;
(2)在移動對象時,要保證參考坐標系為 World,否則,在自身參考坐標下進行移動只會移動自身模型的位置。
3.使用輔助坐標移動
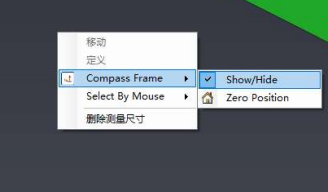
3.1、在三維環境的空白處右鍵,在彈出對話框“Compass Frame”中點擊“Show/Hide”,使其為勾選狀態;
3.2、使用智能捕捉點工具,在目標點處選取點,出現“指南針”坐標,在“World”坐標系下右鍵,使“移動操作坐標系”顯現出來,點擊“移動操作”面板上的“獲取指南針 X”,勾選后面的“Show”,在目的點會出現
3.3、同樣操作取消“Compass”坐標的顯示,選中要移動的物體,右鍵,使 之出現“移動操作坐標系”;
3.4、在“移動操作”面板上“參照世界”里將“參考坐標系”選為“Compass1”,點擊設置即可。
注意:
(1)“指南針 X”是可重復獲取的;
(2)若是重復使用“Compass1”的,在“參考坐標系”處要先選擇其他任意的參考坐標,再選擇“Compass1”,此操作的目的是對“Compass1”的坐標值進行刷新;
(3)在獲取玩點之后要牢記隱藏“Compass”,因為在“Compass”為顯示的狀態下,參考坐標系就自動參照“Compass”,因此所有對象的“移動操作坐標系”都會直接顯示在“指南針”坐標處,這可用于“移動操作坐標系”離移動對象很遠的情況下。
4.位置標定
下面以激光切割案例,來演示下如何標定工件的位置。
4.1、鼠標右鍵空白處,彈出菜單,將 Compass 打到顯示狀態
4.2、捕捉圓心,定位 Compass1、Compass2、Compass3。

4.3、重復第 2 步操作,將 Compass2、Compass3 顯示在其他圓心上。

4.4、打開 Calibrate Position 對話框

4.5、從左邊樹中,將 Piece1,IRB4600 分別拖放到 Calibrate Object 和ReferenceObject 中。

4.6、依次點擊對話框上三個 Compass 按鈕,獲取三個 Compass 相對于 Piece1的相對坐標值,然后輸入三個點在機器人坐標系下的位置坐標,點擊標定按鈕,完成 Piece1 的位置標定。

—THE END—
-
鼠標
+關注
關注
6文章
591瀏覽量
39815 -
三維
+關注
關注
1文章
510瀏覽量
29003 -
工業機器人
+關注
關注
91文章
3370瀏覽量
92736
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論