 LSD中的激光點云/單目3D目標檢測和多目標跟蹤算法
LSD中的激光點云/單目3D目標檢測和多目標跟蹤算法
LSD (LiDAR SLAM & Detection) 是一個開源的面向自動駕駛/機器人的環境感知算法框架,能夠完成數據采集回放、多傳感器標定、SLAM建圖定位和障礙物檢測等多種感知任務。
本文將詳細講解LSD中的激光點云/單目3D目標檢測和多目標跟蹤算法。
LSD(LiDAR SLAM & Detection) github.com/w111liang222/lidar-slam-detection
3D目標檢測跟蹤
3D目標檢測
目標檢測是自動駕駛/機器人環境感知系統中的一項基本任務,常見的目標檢測算法可以分為兩大類:
基于圖像的2D目標檢測,輸出圖像坐標下的2D Box(x, y, l, w, c),由于缺少目標的深度和朝向信息,難以用于機器人的規劃和控制
基于激光點云/相機的3D目標檢測算法,輸出以自車為原點坐標系下的3D Box (x, y, z, l, w, h, yaw, c)
LSD采用了改進的PointPillar和RTM3D算法,能夠實現激光點云/單目相機的3D目標檢測功能,在推理時轉換成TensorRT FP16引擎運算,支持在x86 PC, Xavier NX, Xavier AGX和Orin平臺上實時運行。相關實現代碼位于sensor_inference目錄。整體框架如下圖所示:
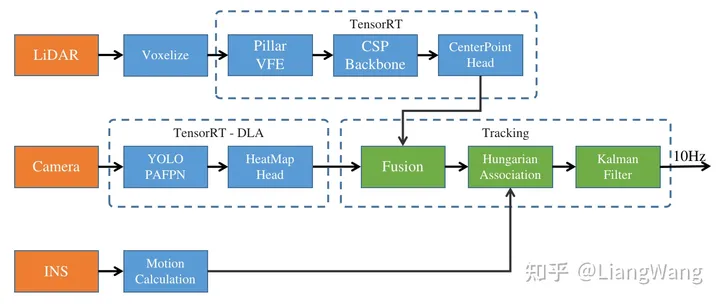 框架流程圖
框架流程圖
點云3D目標檢測
自2017年以來,點云3D目標檢測涌現了很多經典算法,下圖是按時間排序的檢測算法:
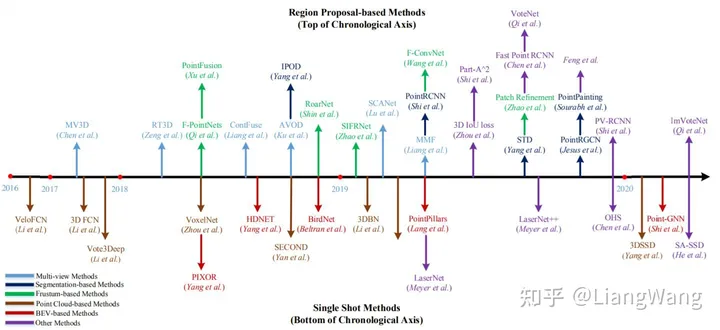 算法一覽
算法一覽
跟圖像2D目標檢測算法類似,3D目標檢測算法也可以分類為"單階段"/"多階段"、"Anchor base"/"Anchor free"、"Point base"/"Voxel base"等,其中APTIV提出的PointPillar由于其部署簡單、計算效率和檢測精度較高等優勢,在實際的工程項目中應用廣泛。
LSD基于原版PointPillar網絡結構,對模型結構進行了優化:
在PillarVFE結構中刪除了xyz的均值特征,保留了每個點的x,y,z,i及其voxel中心offset特征
SSD backbone替換為基于CSPNet結構的backbone
Anchor based檢測頭替換為CenterPoint網絡的Anchor free檢測頭,并添加了IOU aware分支
Voxelize
由于PointPillar網絡的輸入是Voxel(z軸方向只有1維,也叫作Pillar),因此我們需要將原始點云[n, 4]體素化,其中n為點云個數和每個點的特征(x,y,z,intensity)。在LSD中,我們設置每個voxel的尺寸為[0.32, 0.32, 6],單位為米,且每個voxel最多包含32個點,通過將點云投影到其對應的voxel中,可以得到:
voxel特征,維度為[m, 32, 4]
voxel坐標,維度為[m, 3]
每個voxel中點的個數,維度為[1, m]
每個voxel中點的mask,維度為[m, 32]
其中m為計算得到的voxel個數,上述4個變量作為后續神經網絡的輸入。
Pillar VFE
Pillar VFE結構主要是對每個voxel中的點特征進行提取(由7維特征[x, y, z, i, xp, yp, zp]經過卷積得到64維),并根據每個voxel的坐標投影到2D BEV網格得到[64,448,448]大小的特征(最大檢測范圍設置為71.68m)
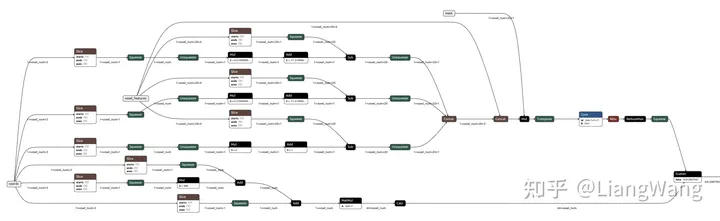 ONNX格式的Pillar VFE
ONNX格式的Pillar VFE
CSP Backbone
PointPillar原版采用的是SSD backbone,其結構較為簡單、參數量小,在實際測試時發現當訓練數據量增大后檢測精度提升幅度較小,因此,我們參考了YOLO V4的backbone,其主要由CSP Net基礎block組成,通過權衡檢測精度和實時性,我們構建了4個下采樣block和3個上采樣block網絡來對多尺度特征進行提取和融合,最后輸出[48,224,224]和[192, 56, 56]兩種尺度特征,詳細的網絡結構可以參見CSPDarknet53Small.py。
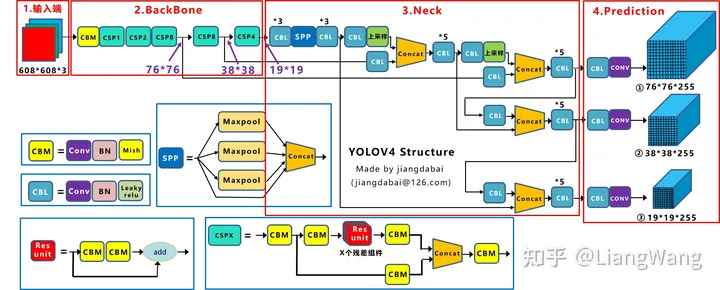 參考的YOLOV4網絡結構
參考的YOLOV4網絡結構
CenterPoint Head
LSD采用了多檢測頭結構,針對backbone輸出的2個尺度特征,分別連接了兩個CenterPoint檢測頭,相比于原版的Anchor based檢測頭,Anchor free在檢測小目標時精度更高。另外,我們還參考了CIA-SSD網絡模型,添加了IOU-Aware預測分支,進一步提高了檢測精度。
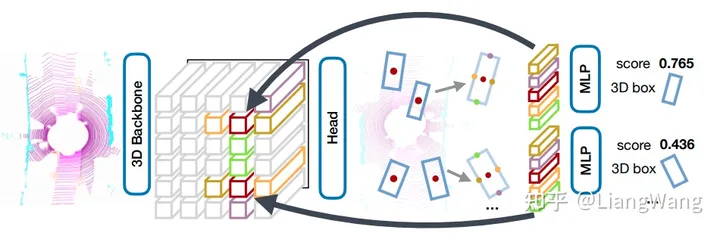 CenterPoint網絡
CenterPoint網絡
單目3D目標檢測
大多數激光雷達由于發射結構的原因,其點云具有近處密集,遠處稀疏的特點,從而導致激光雷達在檢測距離較遠的目標時精度較低,而圖像在距離較遠時相比激光雷達更容易分辨目標,因此LSD采用了單目3D目標檢測算法來提高遠距離目標的檢測精度以適應高速場景。
RTM3D
RTM3D (Real-time Monocular 3D Detection from Object Keypoints for Autonomous Driving)是一個單目3D目標檢測網絡,其主要思想是通過網絡預測目標框的8個頂點、質心、深度和朝向信息,并求解偽逆方程得到目標的3DBox。
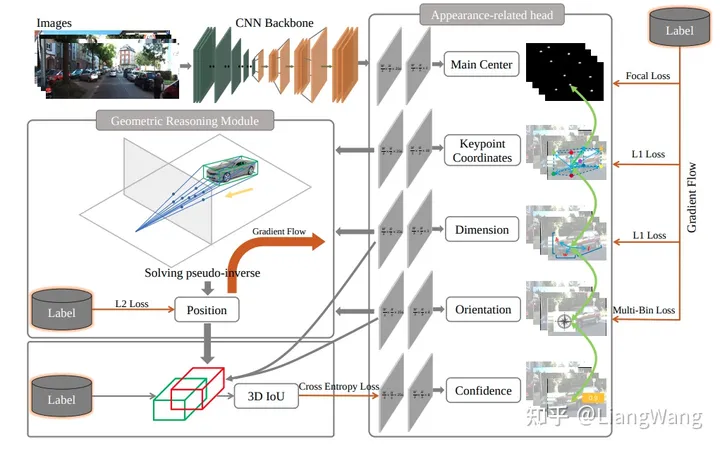 RTM3D
RTM3D
在LSD中,我們對RTM3D的結構做了部分微調:
由ImageNet預訓練的Resnet18 backbone替換為Darknet53
檢測頭增加heatmap輸出,用于后續的目標融合。
模型訓練和推理
模型訓練基于OpenPCDet框架實現,將公開的WOD、Nuscences、Lyft、Panda Set和DeepRoute等數據集進行了合并,并且將不同數據集的各個類別重新分類為“車輛”、“行人”、“騎行車”和“三角錐”4種類別。服務器采用4張2080Ti顯卡訓練50個epoch。
在模型推理階段,我們將Pytorch模型導出成ONNX文件,并分別在Jetpack5.0.2 Xavier NX、 AGX、 Orin平臺上生成了TensorRT FP16引擎進行推理(單目3D模型則運行在DLA上),在Xavier NX平臺上運行耗時約80ms,能夠滿足實時性要求。
ONNX模型文件可以從這里獲取。
后融合
數據融合用于融合多傳感器數據來提高檢測精度,按實施階段可以分為前融合和后融合,前融合通常處理傳感器的原始數據,而后融合則處理各傳感器分別計算后的目標數據。在LSD中,我們采用了后融合的方式,將激光點云輸出的3D目標列表和單目視覺輸出的3D目標列表融合為一個目標列表并輸出給目標跟蹤模塊。我們實現了一個相對簡單的基于規則的融合算法:
將激光點云輸出的3DBox根據激光-相機外參投影到圖像坐標系下得到2DBox,計算與視覺目標的2D IOU
利用匈牙利算法進行匹配,得到matched、unmatch_camera和unmatch_lidar三個目標列表
針對matched列表,我們將激光點云輸出的3DBox直接作為輸出,對于confidence屬性求激光和相機目標的均值加上0.2 * IOU
針對unmatch_lidar列表,利用RTM3D輸出的heat map對confidence屬性求均值
合并matched, unmatch_camera和unmatch_lidar得到最終的目標列表輸出
多目標跟蹤
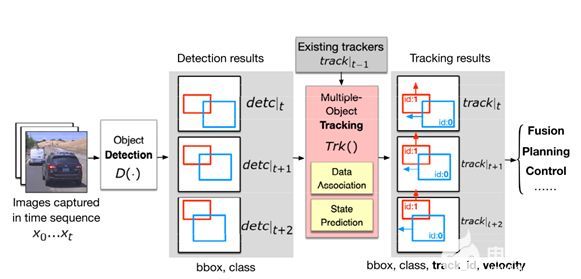
3D目標檢測和融合算法處理的是傳感器的單幀數據,單幀檢測難以獲取目標的運動信息,并且容易出現檢測結果跳變等問題,在時間序列上對目標進行跟蹤,可以估算出目標的運動速度、角速度,同時能夠輸出較為穩定的目標列表給下游規劃控制模塊。目標跟蹤算法通常可以分解成兩個步驟:
根據相似度對相鄰幀目標進行關聯匹配
對目標進行觀測并估計最優狀態
LSD采用了傳統的基于規則的目標匹配和狀態估計算法,算法基于AB3DMOT(A Baseline for 3D Multi-Object Tracking and New Evaluation Metrics)實現,并在其基礎上進行了優化,能夠輸出更穩定的目標列表。
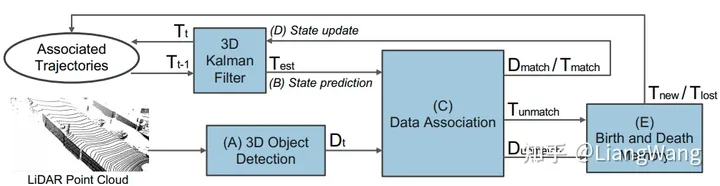 AB3DMOT
AB3DMOT
目標匹配
匈牙利算法是一種求解二分圖最小權值匹配問題的方法
相似度計算
針對不同類別,我們采用了不同的方法來計算前后幀目標相似度(權值):
針對車輛目標,計算兩兩之間的BEV IOU
針對行人、騎行者和三角錐,由于目標較小,前后幀的IOU大部分為0,因此計算兩兩中心點的歐式距離
最優匹配求解
得到相似度矩陣后,我們利用scipy.optimize.linear_sum_assignment函數求解得到三個輸出:
matched: 前后幀匹配上的目標
unmatch_old: 在前一幀跟蹤列表中未匹配上的目標
unmatch_new: 當前幀檢測輸出但未匹配上的目標
卡爾曼濾波跟蹤
卡爾曼濾波是一種狀態估計算法,在LSD中,我們使用卡爾曼濾波算法對目標進行建模和狀態估計:
針對unmatch_new目標,作為當前幀新出現的目標,添加進跟蹤列表
針對unmatch_old目標,表示當前幀該目標未檢測到,通過運動學模型對其進行預測
針對matched目標,將當前幀作為觀測值,利用卡爾曼濾波器對其狀態更新
實車測試
我們只使用了公開數據集進行訓練,在未訓練過的城市道路環境中實車測試,檢驗模型和跟蹤算法的魯棒性。
-
機器人
+關注
關注
211文章
28502瀏覽量
207485 -
激光
+關注
關注
19文章
3218瀏覽量
64587 -
3D
+關注
關注
9文章
2894瀏覽量
107648
原文標題:LSD框架大揭秘 | 3D目標檢測與跟蹤講解
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
新技術可有效地使用目標檢測的對抗示例欺騙多目標跟蹤



使用STT全面提升自動駕駛中的多目標跟蹤






 工商網監
工商網監
評論