

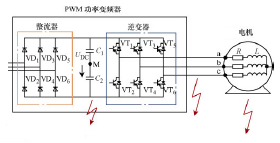
驅動器主電路普遍采用電壓型拓撲結構,主電路如圖1所示,主要包括整流電路、濾波電路、逆變電路等部分,實現交-直-交變換。驅動器輸出給電機的是高頻脈寬調制的電壓波形,輸出電壓是在負母線電壓到正母線電壓之間快速跳變的脈動電壓,虛線是經過電機線圈電感后產生的進似的正弦電壓波形,如圖2所示。
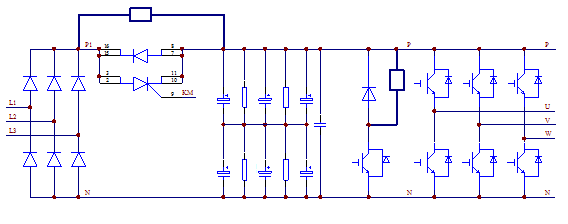
圖1 驅動器主電路電壓型拓撲結構

圖2 高頻脈寬調制的電壓波形,其電壓幅值為+Ud和-Ud
電機的繞組和機殼之間存在分布電容,在工頻拖動的情況下,電源線上只有50Hz的工頻電壓,由于頻率很低,通過分布電容的漏電流很小。但在使用驅動器變頻拖動情況下,由于驅動器輸出的是高頻脈寬調制的電壓波形,輸出電壓是在負母線電壓到正母線電壓之間快速跳變的脈動電壓,對于同樣的電機同樣的分布電容,漏電流會明顯增大,其大小取決于驅動器逆變IGBT的開關頻率,逆變IGBT的開關的速度,直流母線電壓的幅值,電機的繞組對機殼的分布電容(i=C*dU/dt),由于高性能的控制要求較高的開關頻率,其開關速度要求較快,此現象更加明顯,這是由驅動器的工作原理決定的。
圖3是實測的驅動器輸入端的漏電流波形,驅動器逆變IGBT的開關頻率10kHz,可以看出,漏電流主要成分是10kHz的開關頻率的電流。
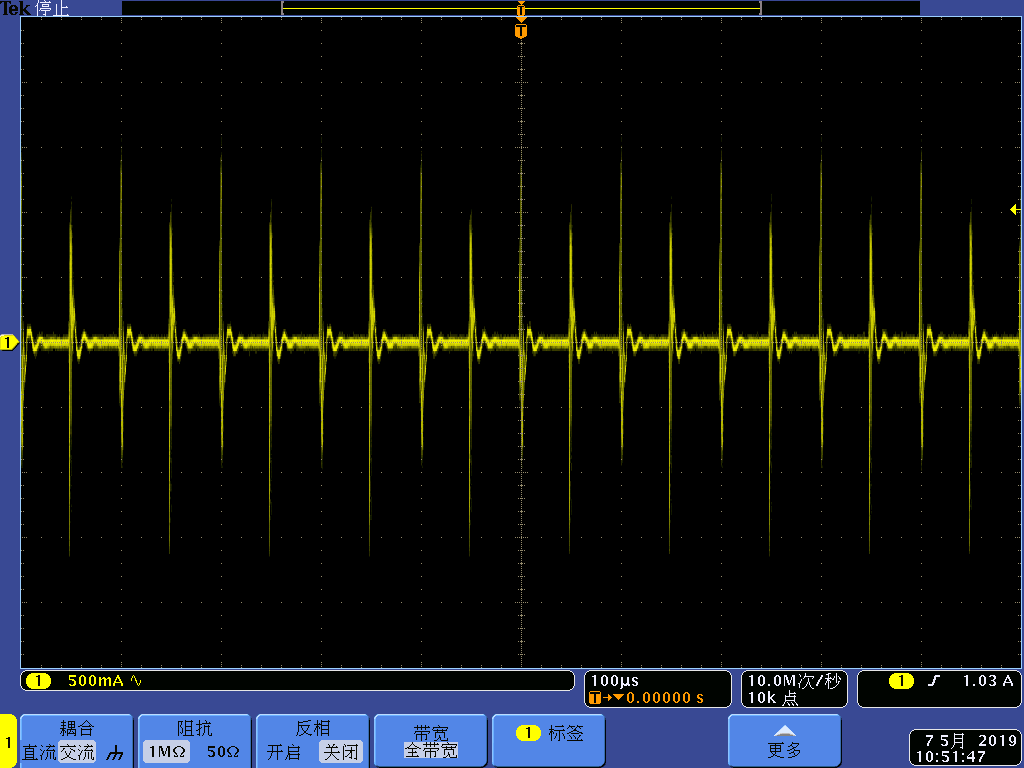
圖3 實測的驅動器輸入端的漏電流波形
審核編輯:湯梓紅
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
驅動器
+關注
關注
54文章
8367瀏覽量
147624 -
濾波電路
+關注
關注
47文章
639瀏覽量
69956 -
逆變電路
+關注
關注
19文章
297瀏覽量
39630 -
漏電流
+關注
關注
0文章
266瀏覽量
17171
發布評論請先 登錄
相關推薦
浪涌電壓/電流產生的原因
浪涌電壓/電流產生的原因主要由電壓突變引起的,浪涌電流是指電網中出現的短時間象“浪”一樣的高電壓引起的大電流。當某些大容量的電氣設備接通或斷開時間,由于電網中存在電感,將在電網
發表于 05-14 17:12
變壓器差動保護工作原理和不平衡電流產生原因
變壓器差動保護工作原理和不平衡電流產生原因
本文簡要闡述變壓器差動保護工作原理,分析差動保護不平衡電流產生的
發表于 12-03 10:15
?1512次閱讀
漏電流是什么_漏電流產生的原因_設備漏電流如何解決
漏電流是PN結在電壓反偏置時通過二極管的電流。發光二極管通常都工作在正向導通狀態下,漏電流指標沒有多大意義。
開關電源諧波電流產生的原因
開關電源諧波電流產生的原因 當我們使用電子設備之后,會發現在開關電源工作時,會產生很多“噪聲”,這些噪聲給人類生活帶來的負面影響非常大,特別是對健康有一定的影響。開關電源諧波電流便是其
漏電流是怎么產生的?如何控制漏電流的危害呢?
的現象。如果未及時加以處理,漏電流可能會對人體和物體帶來極大的危害。因此,控制漏電流的危害是非常重要的。 一、漏電流產生原因 1.絕緣材料老化或破損:電的絕緣材料在經過一段時間后,由于

電機軸電流產生的原因及對策
電機軸電流產生的原因及對策 電機是現代工業和生活中的重要設備之一,廣泛應用于機械傳動系統中。在電機運行過程中,會產生一定的軸電流。軸電流是指
MOS管中漏電流產生的主要六大原因
MOS管中漏電流產生的主要六大原因? MOS管(金屬-氧化物-半導體場效應晶體管)是一種重要的半導體器件,廣泛應用于各種電子設備中。然而,MOS管中漏電流的產生是一個常見的問題,需要仔
電容器漏電流的產生原因和降低方法
。因此,對電容器漏電流的研究和控制具有重要意義。本文將對電容器漏電流進行詳細介紹,包括其定義、產生原因以及降低漏電流的方法,以期為相關研究和
電容器漏電流產生原因有哪些
電容器漏電流是指在電容器內部或外部由于各種原因導致的電流泄漏現象。這種現象可能會影響電容器的性能和使用壽命,甚至可能導致安全問題。 電容器漏電流產生
MOS管泄漏電流的類型和產生原因
MOS管(金屬氧化物半導體場效應晶體管)的泄漏電流是指在MOS管關斷狀態下,從源極或漏極到襯底之間仍然存在的微弱電流。這些泄漏電流可能對電路的性能和穩定性產生不利影響,因此需要深入了解
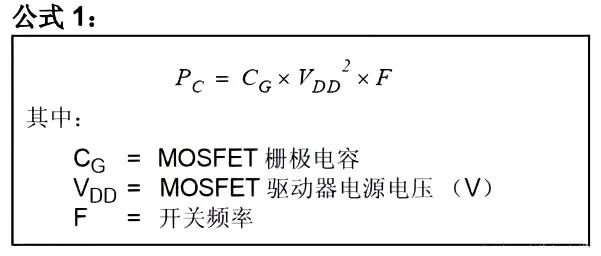
MOSFET驅動器的功耗計算
MOSFET驅動器功耗 MOSFET驅動器的功耗包含三部分: 由于MOSFET柵極電容充電和放電產生的功耗。 由于 MOSFET 驅動器吸收靜態電流





 工商網監
工商網監

評論