 什么是陀螺儀 六軸陀螺儀MPU6050介紹
什么是陀螺儀 六軸陀螺儀MPU6050介紹
已經有很多大佬介紹過了MPU6050的協議、數據處理方式、濾波算法,所以這部分就不再復述了,本篇主要是針對看不懂長篇大論的小白的簡易上手的方法。
首先呢還是得簡單介紹下什么是陀螺儀:
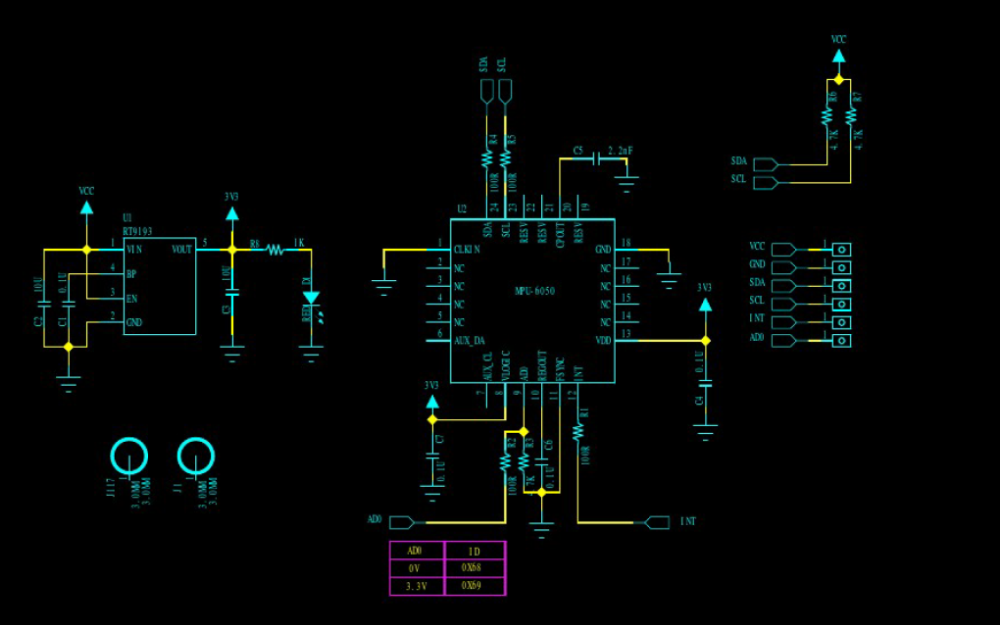
MPU-60X0是世界上第一款集成 6 軸MotionTracking設備。它集成了3軸MEMS陀螺儀,3軸MEMS加速度計,以及一個可擴展的數字運動處理器 DMP( DigitalMotion Processor),可用I2C接口連接一個第三方的數字傳感器,比如磁力計。
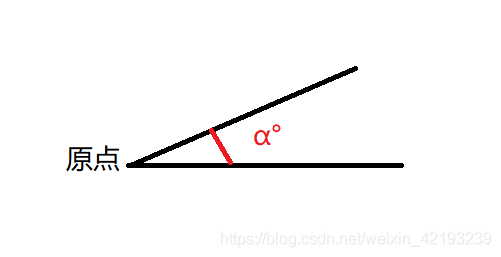
那么本篇文章呢,主要介紹通過復制粘貼的代碼可以實現對當前角度的讀取(軟件IIC),檢測三軸方向上的角度,如上圖,假如該陀螺儀平放在水平面上,從側面看為一個線段,現取一個頂點(圓點),讓另一邊繞該點旋轉,形成一個角度的示意圖,如下圖,這樣便呈現了一個角度,我們的單片機通過協議和處理方法,將這個角度讀取出來(-90-90°),當換一個平面時,相同的繞圓點旋轉便可以出現Y軸,
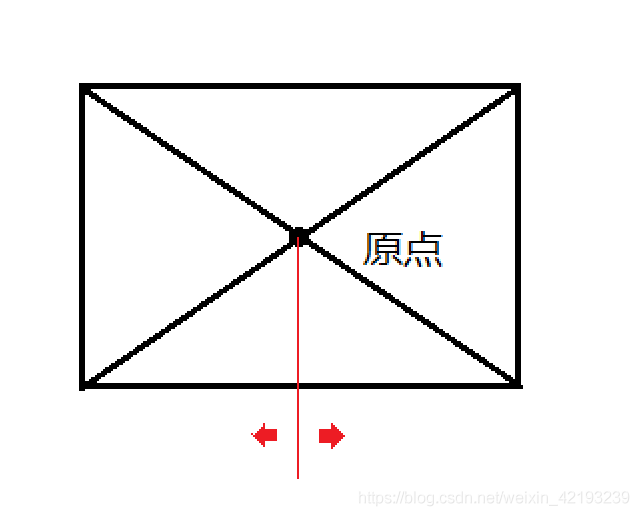
當如果我們想讀取Z軸時(不常用),選擇的方式是以該平面的中心為圓點進行旋轉,可以得到一個角度值,該值通過本篇方法處理后有一定的偏差,常用的為X和Y軸
上面簡單介紹了X、Y、Z軸讀取后的數據分別代碼什么內容,下面來講解針對STM32平臺的代碼移植過程,本篇使用的方式為軟件IIC(通過IO的讀和寫來實現數據讀取,方便移植)
首先我們打開該工程的OLED_I2C.H文件(本文最下面附鏈,以STM32F1為例)
#define OLED_I2C I2C1
#define OLED_I2C_CLK RCC_APB1Periph_I2C1
#define OLED_I2C_CLK_INIT RCC_APB1PeriphClockCmd
#define OLED_I2C_SCL_PIN GPIO_Pin_6
#define OLED_I2C_SCL_GPIO_PORT GPIOB
#define OLED_I2C_SCL_GPIO_CLK RCC_AHB1Periph_GPIOB
#define OLED_I2C_SCL_SOURCE GPIO_PinSource6
#define OLED_I2C_SCL_AF GPIO_AF_I2C1
#define OLED_I2C_SDA_PIN GPIO_Pin_7
#define OLED_I2C_SDA_GPIO_PORT GPIOB
#define OLED_I2C_SDA_GPIO_CLK RCC_AHB1Periph_GPIOB
#define OLED_I2C_SDA_SOURCE GPIO_PinSource7
#define OLED_I2C_SDA_AF GPIO_AF_I2C1
void I2C_Configuration(void);
void I2C_WriteByte(uint8_t addr,uint8_t data);
void WriteCmd(unsigned char I2C_Command);
void WriteDat(unsigned char I2C_Data);
void OLED_Init(void);
void OLED_SetPos(unsigned char x, unsigned char y);
void OLED_Fill(unsigned char fill_Data);
void OLED_CLS(void);
void OLED_ON(void);
void OLED_OFF(void);
void OLED_ShowStr(unsigned char x, unsigned char y, unsigned char ch[], unsigned char TextSize);
void OLED_ShowCN(unsigned char x, unsigned char y, unsigned char N);
void OLED_DrawBMP(unsigned char x0,unsigned char y0,unsigned char x1,unsigned char y1,unsigned char BMP[]);
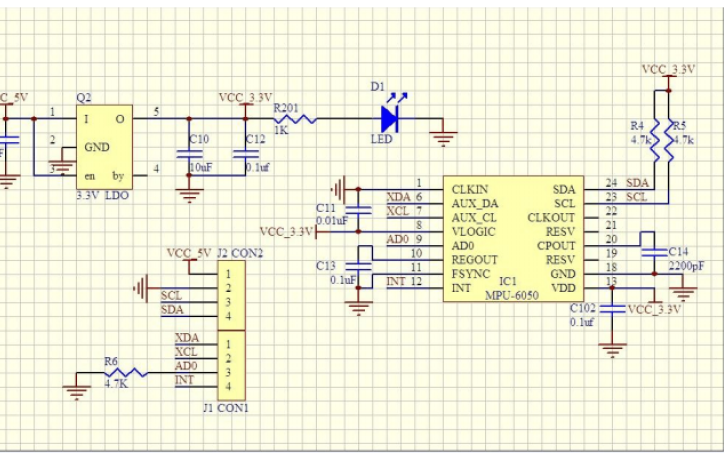
該頭文件部分對使用到的引腳進行了聲明,例如該工程中使用到的SCL引腳為PB6,SDA引腳為PB7,同時我們看一下OLED_I2C.C中是如何使用這些內容的
void I2C_Configuration(void)
{
I2C_InitTypeDef I2C_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
OLED_I2C_CLK_INIT(OLED_I2C_CLK,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitStructure.GPIO_Pin = OLED_I2C_SCL_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD; // 開漏輸出
GPIO_Init(OLED_I2C_SCL_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = OLED_I2C_SDA_PIN;
GPIO_Init(OLED_I2C_SDA_GPIO_PORT, &GPIO_InitStructure);
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;/* 高電平數據穩定,低電平數據變化 SCL 時鐘線的占空比 */
I2C_InitStructure.I2C_OwnAddress1 = OLED_ADDRESS;//OLED的I2C地址
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;/* I2C的尋址模式 */
I2C_InitStructure.I2C_ClockSpeed = I2C_Speed;
I2C_Init(I2C1, &I2C_InitStructure); /* I2C1 初始化 */
I2C_Cmd(I2C1, ENABLE); /* 使能 I2C1 */
}
發現在該C文件中使用到初始化的部分都是通過#define的值進行調用的,所以!! 在本工程中只需要改動OLED_I2C.H種的內容就可以完全實現移植,兼容任何STM32的標準庫
說完了移植代碼,下面看一下如何獲取數據:
首先在main()函數里面需要有兩個初始化,
//I2C初始化
i2c_GPIO_Config();
//MPU6050初始化
MPU6050_Init();
while(MPU6050ReadID() == 0);
通過這兩個初始化和再次校驗,MPU6050的初始化就成功了,現在我們進入數據讀取環節
/**
* @brief 讀取MPU6050的加速度數據
* @param
* @retval
*/
void MPU6050ReadAcc(short *accData)
{
u8 buf[6];
MPU6050_ReadData(MPU6050_ACC_OUT, buf, 6);
accData[0] = (buf[0] << 8) | buf[1];
accData[1] = (buf[2] << 8) | buf[3];
accData[2] = (buf[4] << 8) | buf[5];
}
/**
* @brief 讀取MPU6050的角加速度數據
* @param
* @retval
*/
void MPU6050ReadGyro(short *gyroData)
{
u8 buf[6];
MPU6050_ReadData(MPU6050_GYRO_OUT,buf,6);
gyroData[0] = (buf[0] << 8) | buf[1];
gyroData[1] = (buf[2] << 8) | buf[3];
gyroData[2] = (buf[4] << 8) | buf[5];
}
/**
* @brief 讀取MPU6050的原始溫度數據
* @param
* @retval
*/
void MPU6050ReadTemp(short *tempData)
{
u8 buf[2];
MPU6050_ReadData(MPU6050_RA_TEMP_OUT_H,buf,2); //讀取溫度值
*tempData = (buf[0] << 8) | buf[1];
}
所有的讀取數據都是通過這三個函數實現的,經過上面的初始化后可以直接在主函數中進行使用,我們這里用到的主要是MPU6050ReadGyro()函數,函數內封裝有數據轉換,可以直接得到角度值,此時我們先新建一個變量
新建一個成員為3的數組,方便一次性獲取X、Y、Z軸的數據,使用方式為:
MPU6050ReadGyro(Gyro);
JD1[0]=abs(Gyro[0])/100+'0';
JD1[1]=abs(Gyro[0])/10%10+'0';
JD1[2]=abs(Gyro[0])%10+'0';
該語句是將X軸的角度數據轉換為字符串數據,方便新手下面通過串口輸出數值進行轉換
編輯:黃飛
-
陀螺儀
+關注
關注
44文章
787瀏覽量
98776 -
ST
+關注
關注
32文章
1134瀏覽量
129014 -
STM32
+關注
關注
2270文章
10906瀏覽量
356566 -
濾波算法
+關注
關注
2文章
89瀏覽量
13753 -
MPU6050
+關注
關注
39文章
307瀏覽量
71490
發布評論請先 登錄
相關推薦
我為什么要用陀螺儀MPU6050的理由,你有嗎?
什么是陀螺儀
陀螺儀MPU6050的相關資料推薦
三軸陀螺儀MPU6050的測試程序免費下載

模塊介紹之六軸陀螺儀MPU6050篇(STM32基本使用)

【平衡小車制作】(四)陀螺儀MPU6050(超詳解)





 工商網監
工商網監
評論