") 用于高分辨率激光雷達(dá)的氮化鎵HEMT電路拓?fù)浣Y(jié)構(gòu)
用于高分辨率激光雷達(dá)的氮化鎵HEMT電路拓?fù)浣Y(jié)構(gòu)
來源:EETOP編譯自allaboutcircuits
激光雷達(dá)(LiDAR)基于通過將光束照射到物體上并準(zhǔn)確測量反射的飛行時間來估算距離的原理。通過將發(fā)射光掃過真實世界的場景,可以收集三維信息以供計算機(jī)系統(tǒng)進(jìn)一步處理。LiDAR 的應(yīng)用眾多且還在不斷增長,包括航空測量、用于 3D 建模的對象掃描和自動駕駛車輛控制。
考慮到這一點,本文將首先介紹高性能 LiDAR 系統(tǒng)的一些關(guān)鍵組件,然后展示主要電路并提供 GaN HEMT 的兩種不同設(shè)計拓?fù)涞?a target="_blank">仿真示例:雙邊緣方波和單邊緣諧振電路。
激光雷達(dá)用高功率脈沖激光二極管
LiDAR 系統(tǒng)中最常見的光源是高功率脈沖激光二極管,通常以人眼吸收范圍之外的波長為中心。這些激光器產(chǎn)生的光束質(zhì)量對于 LiDAR 系統(tǒng)的分辨率至關(guān)重要。如圖 1 所示,通過使用高功率、銳利的發(fā)射區(qū)域設(shè)備可以顯著提高分辨率。
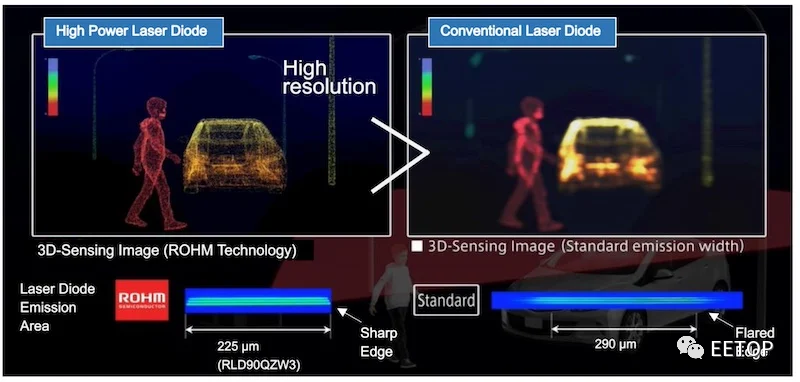
圖 1. 高功率激光二極管提高了 3D LiDAR 傳感的分辨率。
例如,ROHM提供的激光二極管在 905 nm 時的峰值輸出功率高達(dá) 120 W,可與 LiDAR 以及同步定位和映射 (SLAM) 一起使用。
用于 LiDAR 脈沖生成的半導(dǎo)體開關(guān)
要為 LiDAR 產(chǎn)生光脈沖,這些激光器必須由半導(dǎo)體開關(guān)驅(qū)動。同樣,開關(guān)的質(zhì)量直接影響 LiDAR 圖像的分辨率,通常以開啟時間、峰值電流和開關(guān)損耗為特征。
LiDAR 開關(guān)技術(shù)的一個示例是使用氮化鎵(GaN) 構(gòu)建的高電子遷移率晶體管 (HEMT)。與傳統(tǒng)的硅器件相比,這些開關(guān)可以表現(xiàn)出極快的速度和高達(dá) 65%的低功耗,如圖 2 所示。
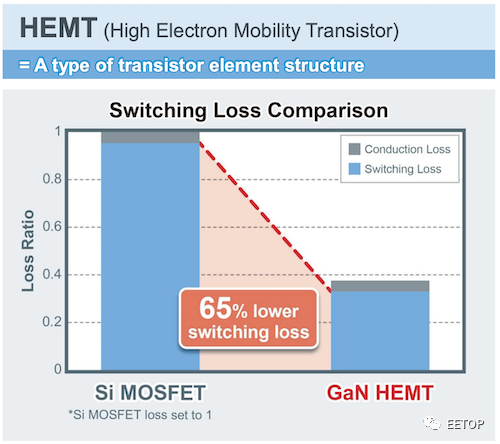
圖 2. 與傳統(tǒng)硅晶體管相比,HEMT 開關(guān)損耗。
對于包括 LiDAR 在內(nèi)的高功率應(yīng)用,GaN HEMT 器件可用于支持各種系統(tǒng)工作電壓和功率水平。例如,ROHM Semiconductor 的 GaN HEMT 產(chǎn)品組合包括 150 V 和 650 V 型號。
HEMT柵極驅(qū)動器
要利用 HEMT 器件的速度優(yōu)勢,必須使用高速信號正確驅(qū)動它們的柵極。在LiDAR 輸出級的最前面是 HEMT 柵極驅(qū)動器,如圖 3 所示。
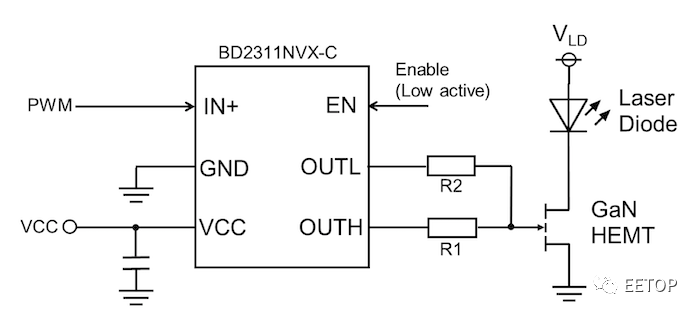
圖 3.為 HEMT 電路使用專門的高速柵極驅(qū)動器 IC。
這些驅(qū)動器專門設(shè)計用于提供適當(dāng)?shù)钠秒妷汉退俣纫赃B接 GaN HEMT 晶體管,同時還提供雙輸出和輸出使能控制等便利功能。
使用所有這些用于控制、驅(qū)動和生成輸出光脈沖的優(yōu)化部件構(gòu)建LiDAR 系統(tǒng)可確保最終輸出圖像具有更高的分辨率。然而,特定應(yīng)用的確切電路拓?fù)渫ǔ囊韵聝煞N類型中選擇一種:雙沿方波或單沿諧振。
雙沿方波 GaN HEMT 電路
為激光二極管提供脈沖的最簡單方法是使用串聯(lián)開關(guān)控制電流,如圖 4 的仿真示意圖所示。
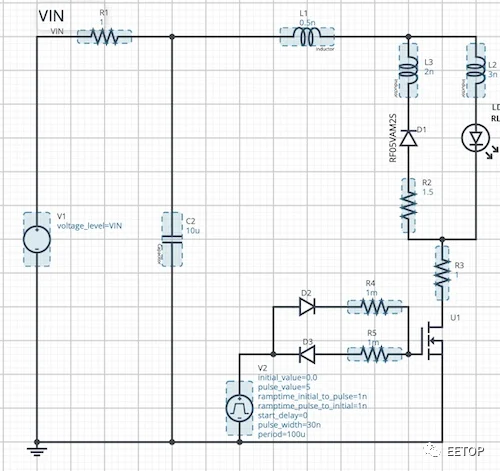
圖 4. 使用方波 HEMT 驅(qū)動器配置的仿真示意圖。
上圖中,U1為GaN HEMT,通過RLD90QZWD 35W激光二極管直接從電源Vin灌電流。當(dāng) U1 的柵極驅(qū)動為高電平時,激光器打開,當(dāng)驅(qū)動為低電平時,激光器關(guān)閉。這兩個邊沿控制光輸出的脈沖寬度,因此稱為“雙邊沿”或方波配置。
該控制方案的仿真波形如圖 5 所示,其中HEMT 上的柵極電壓用紅色表示,通過 HEMT 的電流用綠色表示。
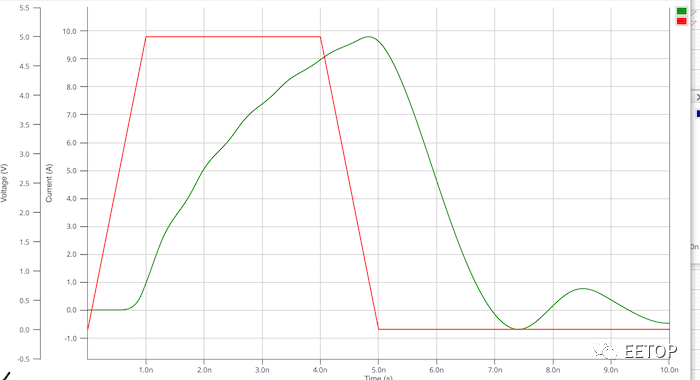
圖 5.使用方波 HEMT 柵極驅(qū)動器的柵極電壓(紅色)和漏極電流(綠色)。
在圖 6 中,激光二極管的光輸出功率以藍(lán)色表示。
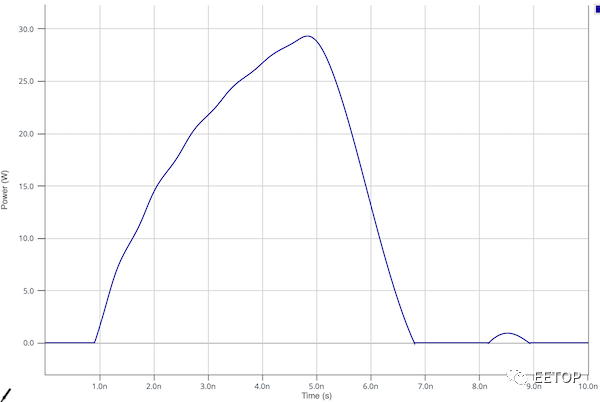
圖 6. 使用方波 HEMT 柵極驅(qū)動器的光輸出功率。
雖然這種類型的驅(qū)動器可以輕松實現(xiàn)并提供輸出脈沖寬度的靈活性,但有幾個缺點使其成為高性能 LiDAR 的一個相當(dāng)不受歡迎的選擇。
1. 激光器的開啟速度直接受限于HEMT的開啟速度和電路中的串聯(lián)電感。
2. 脈沖形狀是不對稱的,開啟和關(guān)閉邊沿都需要仔細(xì)考慮時序。
盡管存在這些缺點,但可以通過使用更流行的諧振配置來改進(jìn)這兩個特性。
單邊諧振 GaN HEMT 電路
如圖 7 的仿真示意圖所示,諧振拓?fù)鋵?HEMT 置于完全不同的角色。
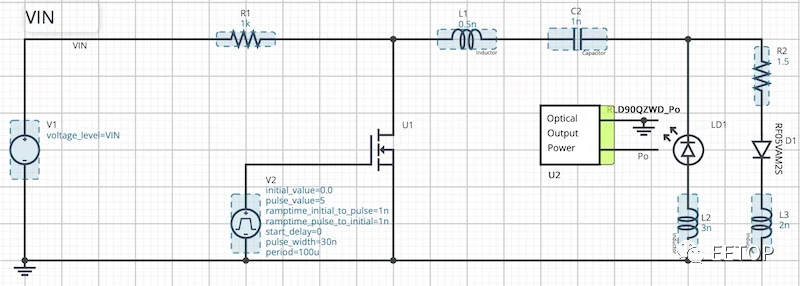
圖 7. 諧振配置 HEMT 柵極驅(qū)動器的仿真示意圖。
HEMT (U1) 不是直接控制通過激光器的電流,而是用于啟動通過電感 L1 和電容器 C2 的諧振放電。這樣,只有控制信號的前沿是重要的,因為脈沖寬度完全由與激光器串聯(lián)的 LC 電路決定。
諧振配置的柵極電壓和漏極電流如圖 8 所示,光輸出功率如圖 9 所示。
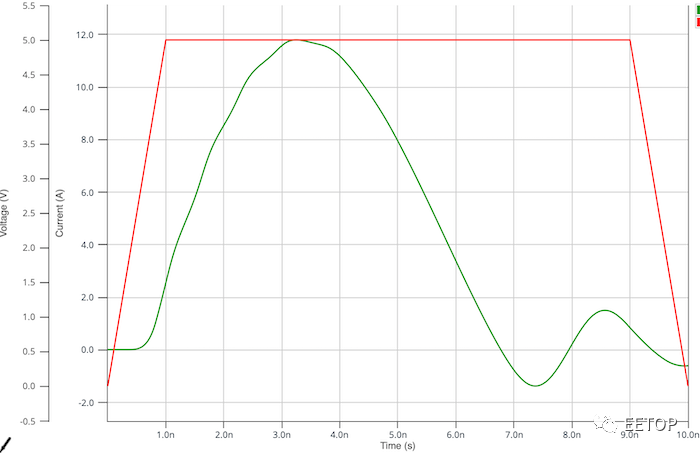
圖 8. 使用諧振配置的柵極電壓(紅色)和漏極電流(綠色)。
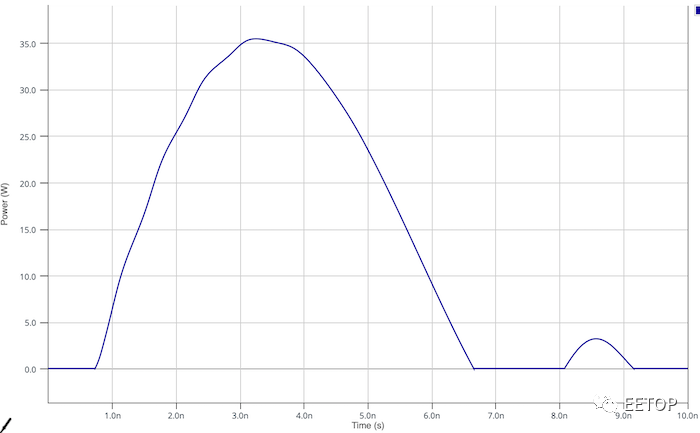
圖 9. 使用諧振配置的光輸出功率
正如這些圖所示,柵極驅(qū)動的上升沿通過激光器啟動 C2 中存儲的能量的放電。值得注意的是,激光信號的脈沖寬度與柵極信號的下降沿?zé)o關(guān)。
與其雙沿方波對應(yīng)相比,諧振設(shè)計具有幾個獨特的優(yōu)勢:
1. LC 諧振允許具有明確定義的對稱性的更窄的脈沖——這對于LiDAR 來說尤其重要。
2. 元件和電路布線中的寄生串聯(lián)電感可用作 LC 諧振的一部分。不像在方波設(shè)計中那樣阻礙速度,而是可以調(diào)整總電感以獲得最佳性能。
3. 激光脈沖的能量只是輸入電壓的一個因素。在總能量至關(guān)重要的應(yīng)用中,這可以實現(xiàn)精確控制,而無需考慮柵極驅(qū)動的時序。
所有這些優(yōu)勢的代價是設(shè)計諧振條件的復(fù)雜性。必須對雜散電感進(jìn)行建模,其中包含影響整體性能的重要因素的組件和走線的物理定位和布局。一種有助于設(shè)計這些電路的有用工具是ROHM Semiconductor 的在線電路模擬器,其中包括預(yù)填充的驅(qū)動器拓?fù)洹?/p>
作為雜散電感影響的示例,使用增加的 L2 項重復(fù)圖 7 至圖 9 的仿真,以查看光輸出如何受到影響。此外,如圖 10 所示,當(dāng) L2 從 3 nH 增加到 6 nH 時,峰值輸出功率降低了 26%,而脈沖寬度增加了近 50%。
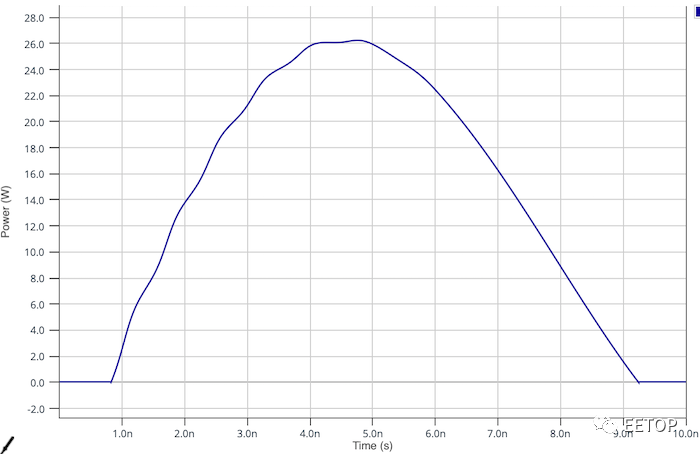
圖 10.增加串聯(lián)電感 (L2) 的諧振配置的光輸出功率
對這些參數(shù)的敏感性通常需要提前對電路進(jìn)行建模,并且很可能要進(jìn)行多次迭代設(shè)計和測試。此外,在不需要短脈沖或首選可變脈沖寬度的應(yīng)用中,無法利用諧振優(yōu)勢。
選擇正確的拓?fù)湟詽M足您的LiDAR 要求
隨著 LiDAR 和類似的測距技術(shù)在當(dāng)今世界變得越來越普遍,底層設(shè)備也必須不斷發(fā)展以滿足不斷增長的性能要求。同時,工程師必須了解可用于在任何特定應(yīng)用中取得成功的不同設(shè)計方法和工具。
正如我們所討論的,單邊諧振電路通常為這些高速 GaN HEMT 開關(guān)應(yīng)用提供改進(jìn)的性能,但代價是增加了設(shè)計復(fù)雜性。如果您的應(yīng)用不需要這種更高級別的復(fù)雜性,則雙沿方波電路拓?fù)涮峁┝艘环N更簡單的解決方案。
審核編輯:湯梓紅
-
拓?fù)浣Y(jié)構(gòu)
+關(guān)注
關(guān)注
6文章
324瀏覽量
39237 -
氮化鎵
+關(guān)注
關(guān)注
59文章
1640瀏覽量
116447 -
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
3991瀏覽量
190094 -
HEMT
+關(guān)注
關(guān)注
2文章
58瀏覽量
12393 -
LIDAR
+關(guān)注
關(guān)注
10文章
327瀏覽量
29456
原文標(biāo)題:用于高分辨率激光雷達(dá)的氮化鎵 HEMT電路拓?fù)浣Y(jié)構(gòu)
文章出處:【微信號:wc_ysj,微信公眾號:旺材芯片】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
Ouster發(fā)布兩款新型高分辨率激光雷達(dá)傳感器,為自動駕駛提供更安全的技術(shù)
Ouster發(fā)布超寬視場角激光雷達(dá),提供更豐富的分辨率選擇
ZoomFFT算法基本原理及其應(yīng)用介紹(雷達(dá)頻譜局部細(xì)化,提高分辨率)
常見激光雷達(dá)種類
ADC信噪比要怎么分析?高速高分辨率ADC電路要怎么實現(xiàn)?
如何設(shè)計高速高分辨率ADC電路?
高分辨率ADC的板布線分析
Intel發(fā)布一款高分辨率激光雷達(dá)攝像頭 號稱全球體積最小能效最高
Ouster推出了兩款新型的高分辨率數(shù)字激光雷達(dá)傳感器
美國開發(fā)新技術(shù):可幫助激光雷達(dá)高分辨率地檢測附近快速移動的物體
嶺緯科技打造的高分辨率固態(tài)激光雷達(dá)分辨率高達(dá)480~720線
新款激光雷達(dá)實現(xiàn)最低成本、高分辨率的遠(yuǎn)程探測
用于Raspberry Pi的高分辨率流媒體

Ouster全新激光雷達(dá)傳感器問市,可使用128通道分辨率

機(jī)載單光子激光雷達(dá)系統(tǒng)用于實現(xiàn)高分辨率3D成像






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論