

本文為使用OpticStudio工具設計優化HUD抬頭顯示器系統的第二部分,主要包含演示了如何使用OpticStudio工具設計分析抬頭顯示器(HUD)性能,即全視場像差(FFA)和NSC矢高圖。
上篇文章中,我們主要介紹了如何以逆向方式對于HUD系統進行建模,下一步我們將根據分析系統的初始性能,并結合具體設計指標了解如何對系統進行控制與優化。
初始性能
增加系統像差的因素是風擋玻璃,我們可以對于像差進行分析。
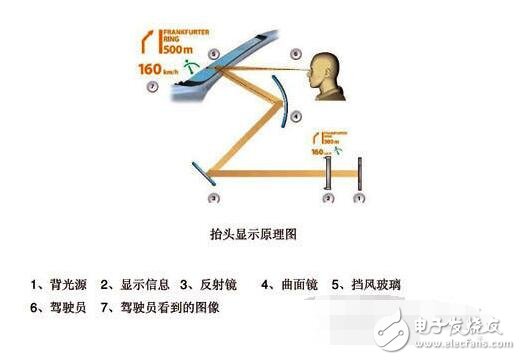
該系統可以簡化為來自無窮遠處(眼睛)的光,并被風擋玻璃反射; 反射后,點列圖可以告訴我們在“真實”風擋玻璃和理想風擋玻璃(平面鏡)的情況下的光線角度。
以下是定義文件的不同步驟:
忽略表面6至11;
將視場類型轉換為角度;
將“物面厚度”值設置為“無限”;
在風擋玻璃后面添加一個標準表面,作為理想平面風擋玻璃的模型。 將材質設置為“MIRROR”。 在“Surface 4 Properties”的“Aperture”下,從“Surface 3”中拾取“Aperture”;
創建兩種多重結構:一種帶有“真正”風擋玻璃,另一種帶有理想的平面反射風擋玻璃(表面3和4);
勾選System Explorer… Aperture下的Afocal Image Space,設置單位為角度。
這些修改可以在“ HUD_Step1_windshield_aberration.zar ” 文件中找到:
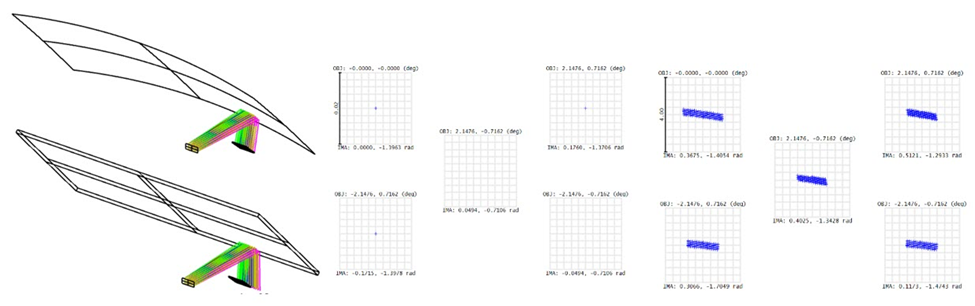
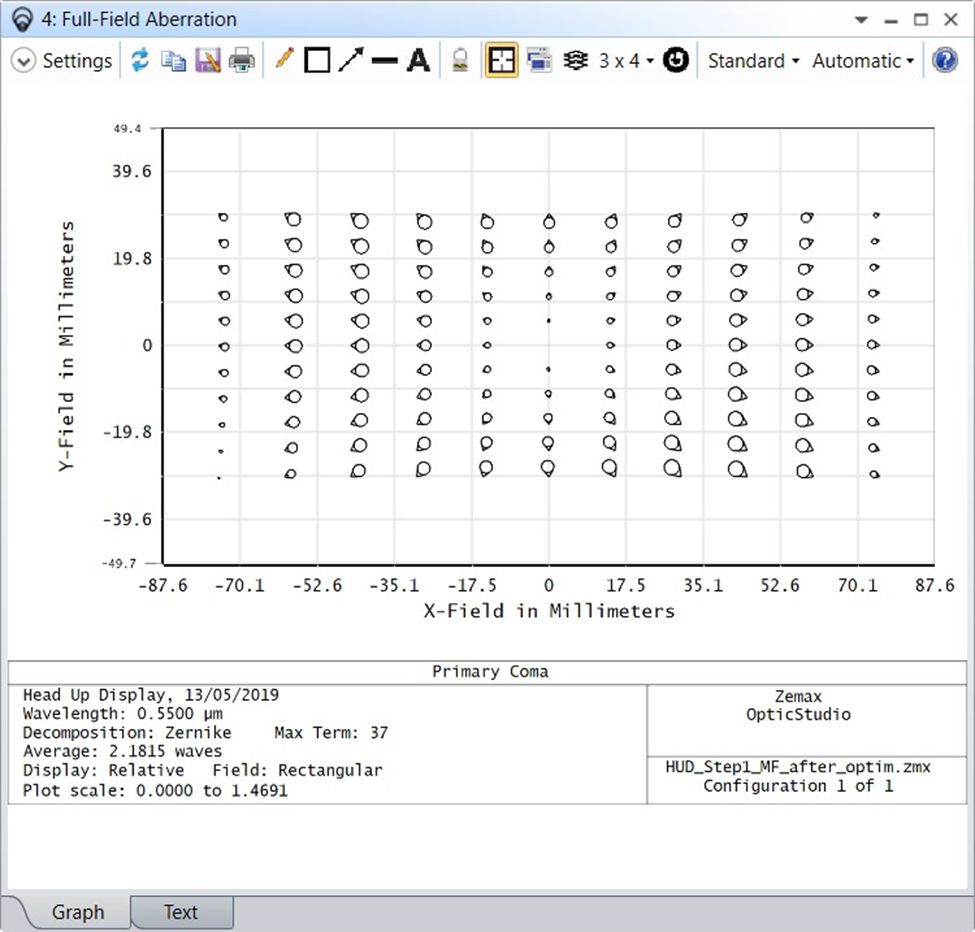
要分析風擋玻璃引入的像差,請單擊 Analyze... Aberrations... Full Field Aberration 。 塞德爾像差工具在此不適用,因為它只描述旋轉對稱系統中的三階像差。
全視場像差分析計算波前的Zernike分解項,并顯示整個視場的Zernike系數。
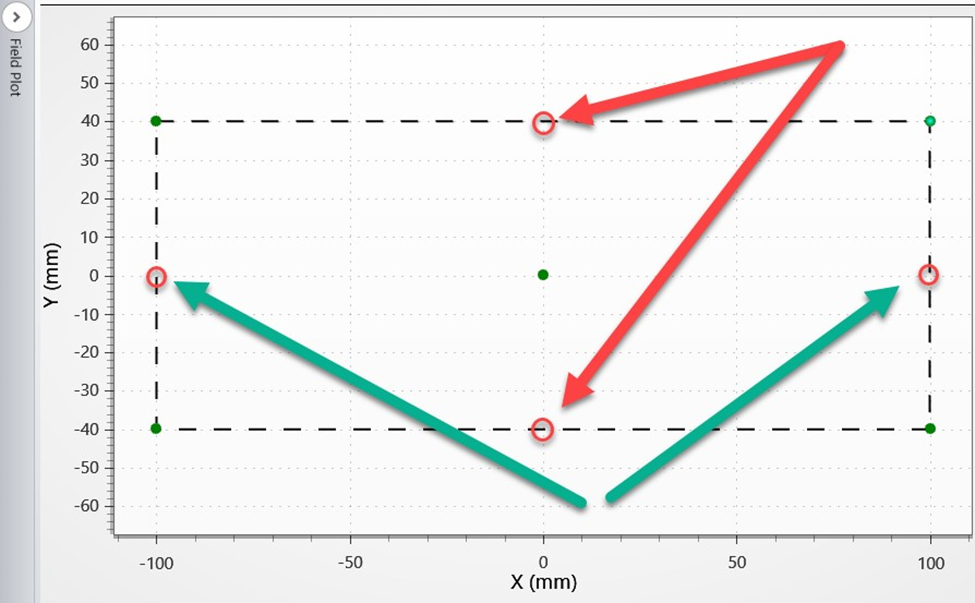
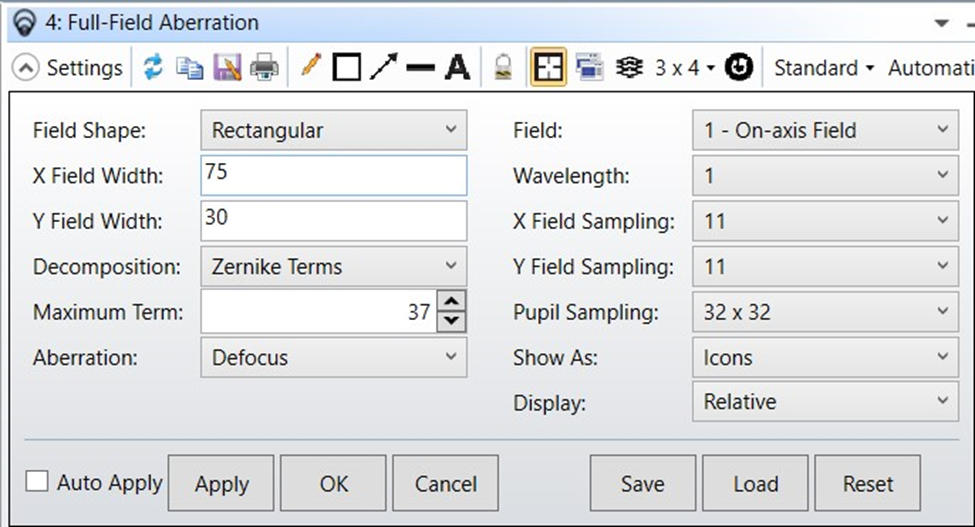
整個視場由紅色方框的設置定義:
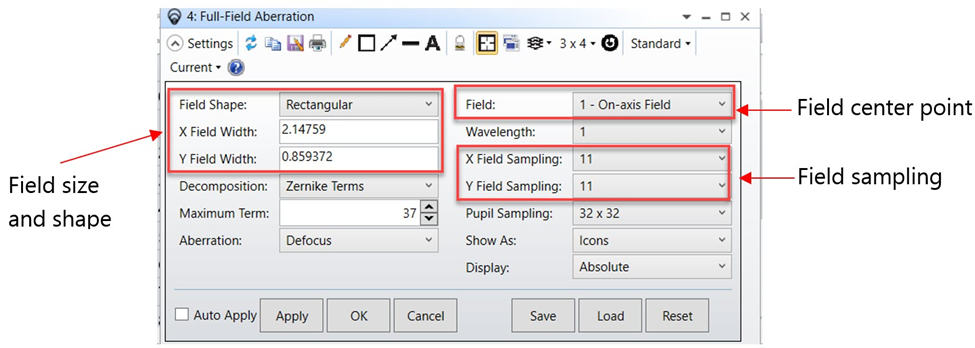
以下是這些視場點的表示:以下是這些視場點的表示:
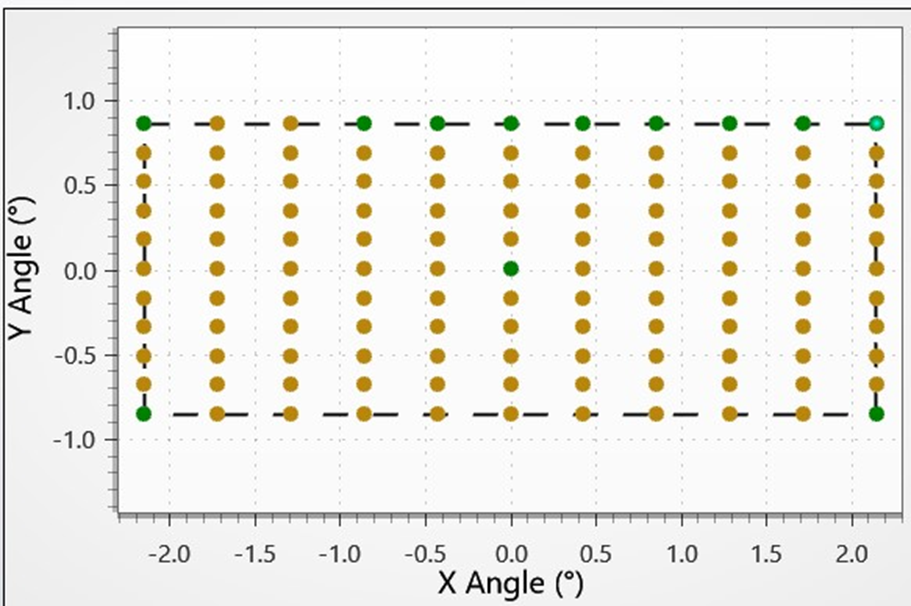
對于每個視場點,軟件將波前擬合為一系列Zernike標準多項式,就像在Analyze…Wavefront…Zernike Standard Coefficients下所做的那樣。以下設置定義了需要顯示的Zernike像差項:
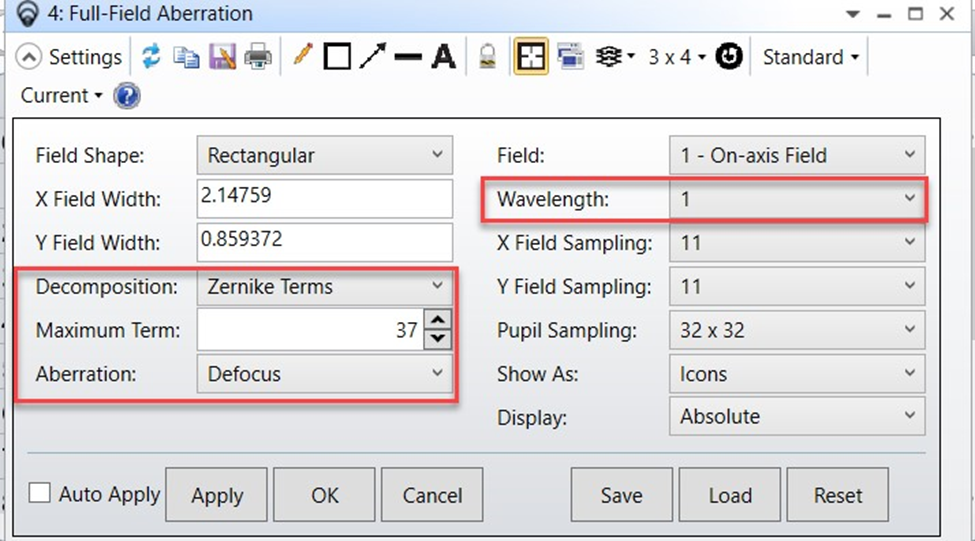
在像差下,根據Zernike標準項5(Z5)和Zernike標準項6(Z6)計算初級像散:

初級像散定義為:
幅度 = sqrt (Z5^2 + Z6^2)
角度 = (1/2)*atan2(y = -Z5 , x = -Z6)
這里,atan2是C語言函數,它給出了(y/x)的反正切。
如果“顯示”設置為“圖標”,則線的長度將給出大小,方向將給出角度。
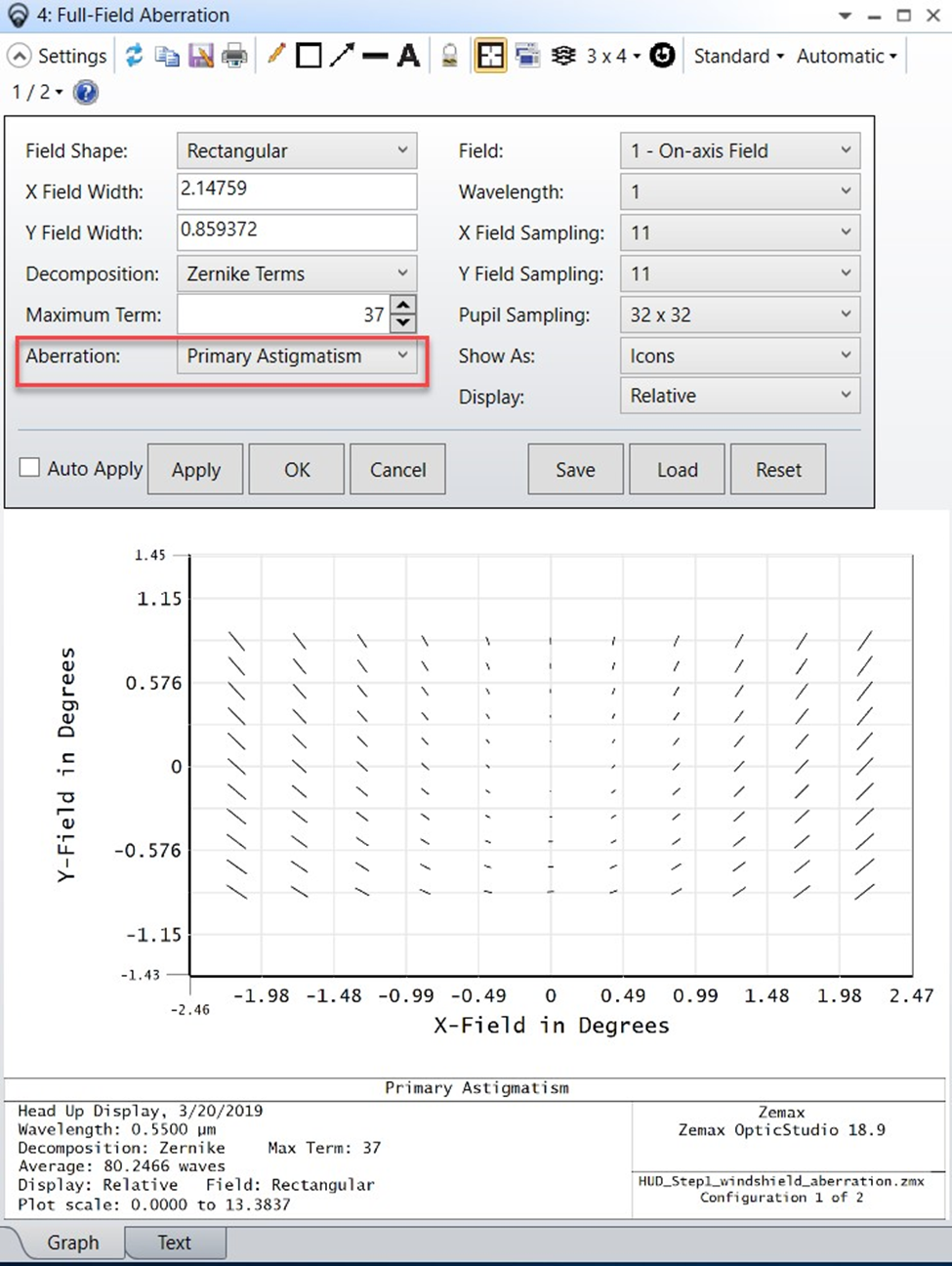
在框架的下方是所選像差的顯示范圍,這里則為全視場的初級像散。
這個系統的結果為:
1.離焦:174.4 waves
2.初級像散:平均為80.2 waves
可以看出,該系統最初受到風擋玻璃帶來的像散限制,光束也會被風擋玻璃稍微聚焦。但是離焦值不是問題,因為設計會將光束聚焦到LCD顯示器上。HUD的設計將從校正像散開始。
建立評價函數
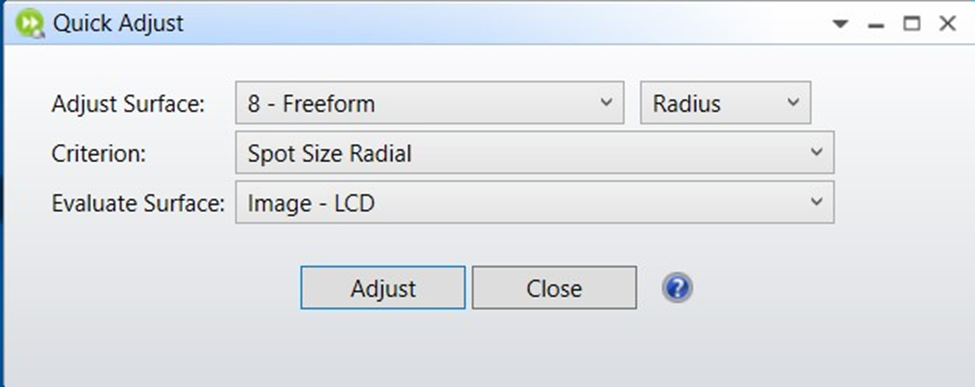
回到我們的原始文件“HUD_Step1_StartingPoint.zar”,自由曲面反射鏡現在可以進行優化,以校正風擋玻璃引入的像差。首先,“優化”下的“快速調整”工具可以用來使我們的自由曲面鏡成為球面鏡。這是一個很好的起點。
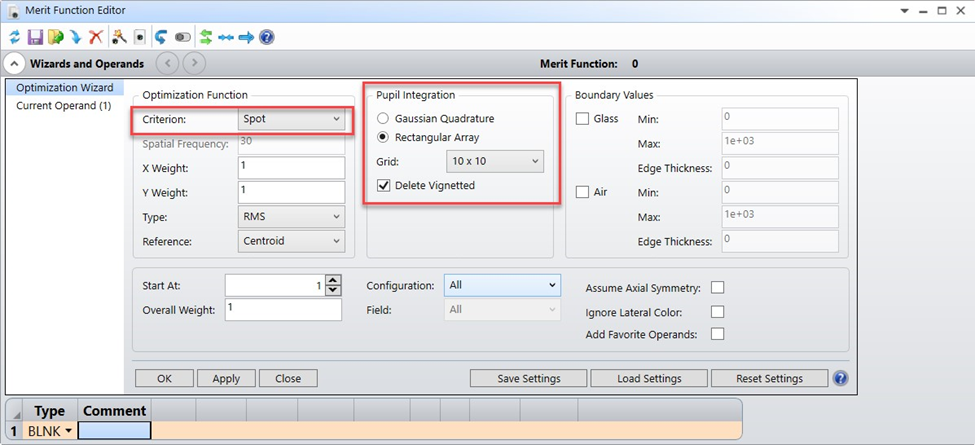
建立一個默認的評價函數:
可以構建默認的評價函數來優化最小的光斑尺寸(RMS點)。該系統包含孔徑,因此將使用矩形陣列方式對光瞳進行采樣。
這里可以使用全視場像差來檢查視場采樣。視場上像差的快速變化可能意味著需要更多的視場點。
然后,可以手動添加其他指標,其中手動添加的操作數位于評價函數的頂部:
放大率:一個規格是關于放大率。可以添加REA*(真實光線坐標)操作數,以檢查LCD顯示器上光線X和Y的位置。DIVI操作數可用于計算放大率(像面上的主光線高度與物面上的比率)。將在這些DIVI操作數上放置10的權重因子。
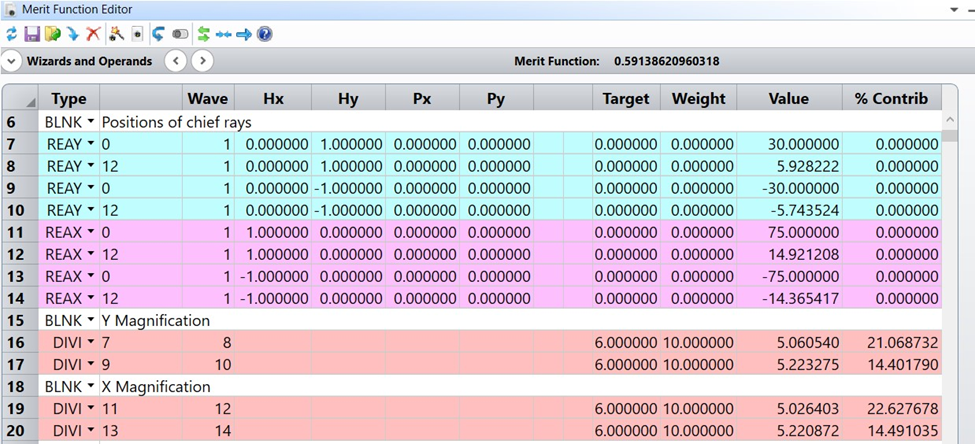
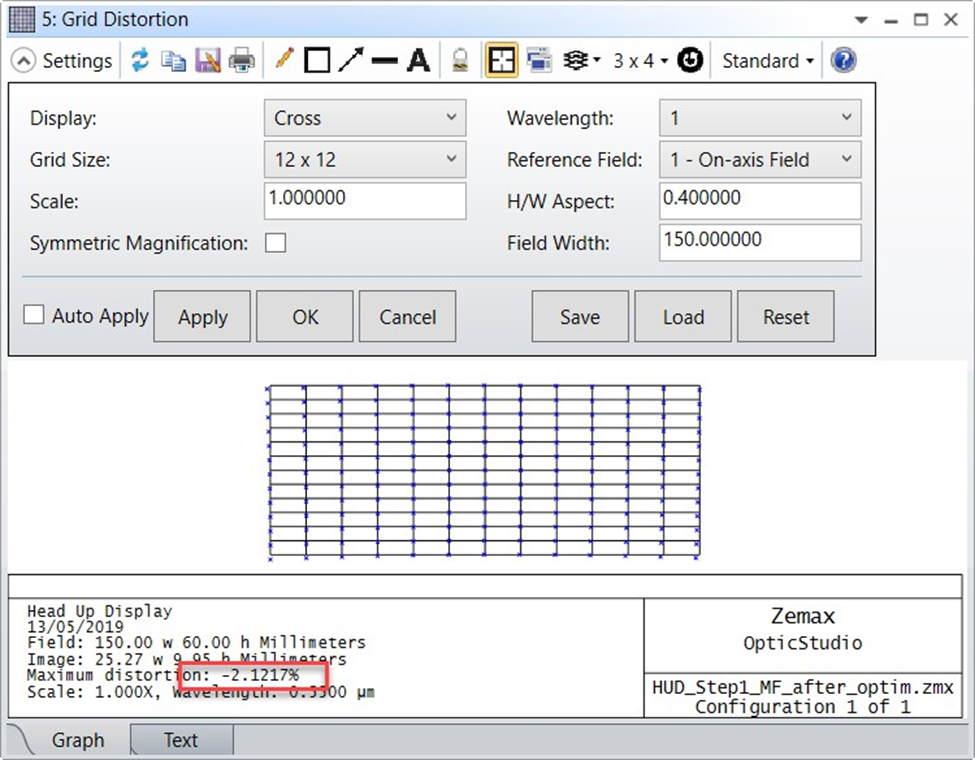
畸變:最后一個規格是關于畸變。它必須低于2%。
像畸變這樣的近軸計算并不總是能很好地處理具有坐標間斷的非對稱系統。使用畸變操作數時,請始終驗證結果是否合理。可以使用CENX和CENY對視場的四個視場角(視場2至5)手動檢查和/或計算質心的位置。

評價函數現已準備就緒。在優化之前,可以將自由曲面反射鏡從標準面更改為自由曲面;這里是一個Zernike標準矢高曲面,有11項。
Zernike多項式非常適合優化,但它們可能需要轉換回標準多項式,如用于制造的擴展多項式。
Zernike曲面的歸一化半徑設置為大于半直徑的固定值。在優化過程中,如果該半徑不是固定的,則每次更新時,都會在優化期間在評價函數上產生一些變動。

優化之前的文件稱為“HUD_Step1_MF_before_optim.zar”。
變量:
Z1是Piston項;它不會被使用。
Z2和Z3是傾斜項。LCD顯示器等元件的不同位置是固定的,因此不會使用傾斜項。
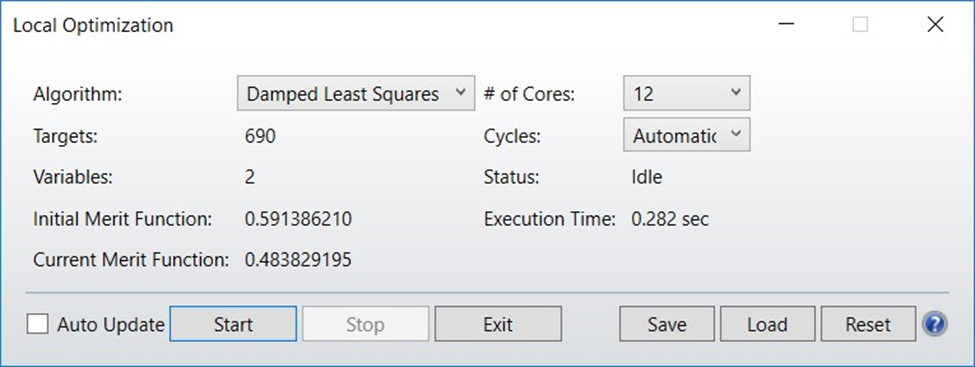
系統包含兩個變量:后焦距的長度,自由曲面反射鏡的曲率半徑。
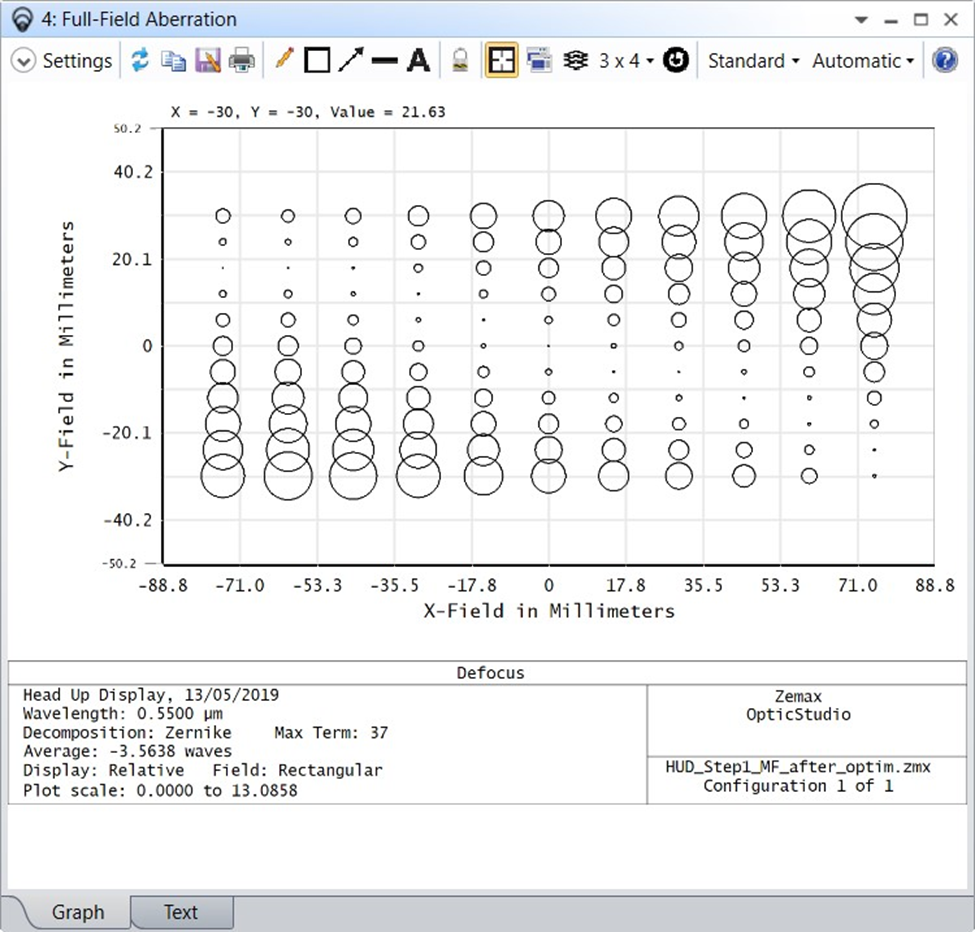
在進行第一次局部優化后,可以檢查全視場像差:
整個視場的平均值:
Z4是離焦/場曲,并設置為變量。
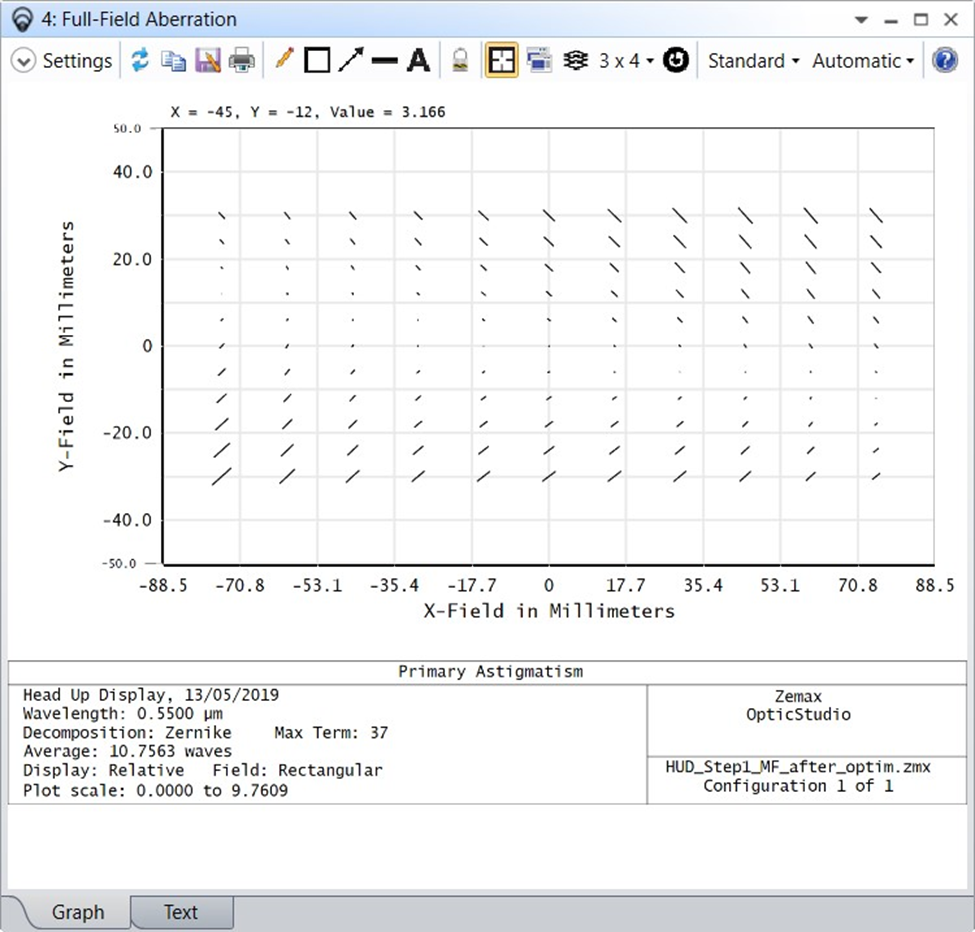
Z5和Z6是主初級像散,并且設置為變量。
優化后,整個視場的平均值為:

Z7和Z8是初級彗差,并且設置為變量。
Z9和Z10是彗差,并且被設置為變量。
Z11是平衡的初級球差,并且被設置為變量。
然后是一分鐘的Hammer優化:
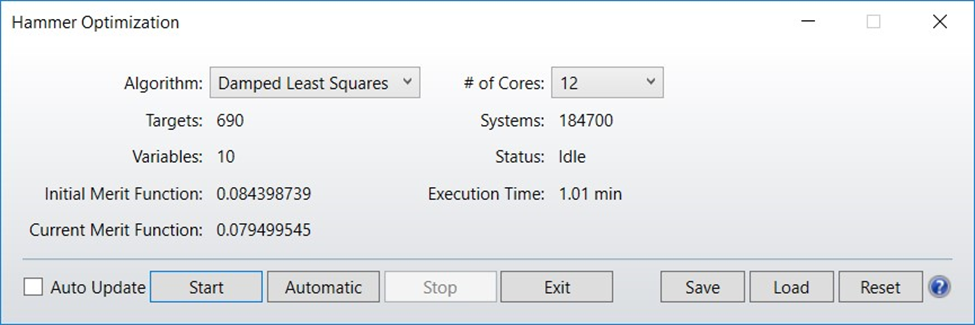
優化后的文件稱為“HUD_Step1_MF_after_opti.zar”。
優化結果
優化的結果可以看出,該系統尚未翻轉,因此性能不是“真實”性能,而是“翻轉”性能。
光斑大小(RMS):光斑的RMS半徑低于200微米。它沒有提供太多信息;當系統翻轉時,檢查角度大小將更令人感興趣。
像散與彗差:可以再次檢查全視場像差,以查看優化是否降低了初級像散。除了像散之外,最有可能影響HUD成像質量的Zernike項是彗差和球差。用于以下結果的視場是總視場,它表示駕駛員看到的最大角度范圍,允許頭部在HUD眼盒內垂直和水平移動。它還顯示了兩只眼睛所看到的視差。
整個視場的平均值為:
像散的范圍從80減少到11 waves。下圖使用的是相對比例(顯示設置),從絕對值中減去平均值。它可以更好地了解整個視場的像差變化:
畸變:略高于2%
審核編輯:湯梓紅
-
顯示器
+關注
關注
21文章
5050瀏覽量
141127 -
C語言
+關注
關注
180文章
7626瀏覽量
139571 -
函數
+關注
關注
3文章
4363瀏覽量
63775 -
抬頭顯示器
+關注
關注
0文章
22瀏覽量
13982 -
HUD
+關注
關注
15文章
167瀏覽量
47145
原文標題:設計抬頭顯示器時要使用哪些 OpticStudio 工具 – 第二部分
文章出處:【微信號:光電資訊,微信公眾號:光電資訊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
永銘固液混合電容器—HUD抬頭顯示器中的應用

汽車抬頭顯示器HUD 分享與請教

基于STM8的車載抬頭顯示器設計

WayRay攜帶汽車抬頭顯示器登場CES2018 設計全息AR擋風玻璃產品
hud汽車抬頭顯示器詳解_汽車hud抬頭顯示缺點及優點_汽車hud抬頭顯示哪款好(品牌)
寶馬hud抬頭顯示好用嗎_寶馬hud抬頭數字顯示多少錢_寶馬hud抬頭顯示效果
業界首款基于波導技術的汽車專用抬頭顯示器
上海丹諾西誠HUDVision抬頭顯示器評測 可謂是抬頭顯示器中的一股清流
如何將OpticStudio中的HUD設計轉換進入Speos中
車載HUD(抬頭顯示器)的起源和發展
愛普生開發的S2D13V40用于汽車平視顯示器/抬頭顯示控制器IC
DLP3030-Q1抬頭顯示器(HUD)Piccolo SPI用戶手冊






 工商網監
工商網監

評論