我做了一個(gè)用2片IR2104的全橋電路老是有一路的驅(qū)動(dòng)芯片發(fā)燙(只加個(gè)12v電源給IR2104供電就發(fā)燙,還沒(méi)加驅(qū)動(dòng)信號(hào)),加上場(chǎng)管就發(fā)燙,拆了場(chǎng)管就不燙,拆了場(chǎng)管,加上驅(qū)動(dòng)信號(hào)發(fā)現(xiàn)只有低端有輸出波形對(duì),高端波形不對(duì),希望大神講解一下,謝謝原理圖PCB見附件
2017-07-18 22:10:01
IR2104 - HALF-BRIDGE DRIVER - International Rectifier
2022-11-04 17:22:44
請(qǐng)教各位大俠,我想實(shí)現(xiàn)28.5KHz的pwm波經(jīng)半橋到MOS管輸出,后面的負(fù)載為L(zhǎng)C選頻諧振電路,產(chǎn)生一個(gè)峰峰值在400~600V的正玄波。用Multisim仿真是可以達(dá)到目的,但是實(shí)際電路中發(fā)現(xiàn)IR2104的HO腳輸出的波形異常,不知怎么回事。拜托!!
2018-11-27 12:13:15
用ir2104電橋驅(qū)動(dòng)器芯片控制兩個(gè)mos管的導(dǎo)通與關(guān)斷設(shè)計(jì)成為buck開關(guān)電源,將其中一個(gè)開關(guān)電源設(shè)計(jì)工作在恒壓模塊,穩(wěn)壓U0輸出為8V。另一個(gè)開關(guān)電源設(shè)計(jì)工作在恒流模塊。希望諸位大佬不吝賜教!
2017-07-24 14:08:29
這個(gè)驅(qū)動(dòng)電路,10A用7843是沒(méi)有問(wèn)題的啊,PWM低的時(shí)候正常工作,可PWM一調(diào)高,一段時(shí)間IR2104就燙的不行,燙到焊錫都化了,2104也燒的不像樣……
2015-08-15 21:52:48
做的IR2104驅(qū)動(dòng),不知道怎么回事。一上電后,IR2104就開始叫了,而且也不符合正常的輸入輸出波形。我把IR2104取下后測(cè)試電壓,都正常!請(qǐng)教各位高手,指點(diǎn)一下!
2013-08-27 10:00:49
求大佬幫忙:用ir2104搭建的驅(qū)動(dòng)電路,輸入PWM波,引腳HO輸出電壓持續(xù)變大是怎么回事?從幾十毫伏一直增加到幾十伏,而且接上負(fù)載斬波電路后,HO引腳就不再是矩形波,求大神解答,謝謝!
2018-05-01 19:46:04
大神幫幫忙ir2104的外圍電路照著經(jīng)典電路做的自舉電容選的獨(dú)石電容106,二極管選的1n4148,vcc接12v,sd接vcc,in接tl494單端輸出的pwm頻率在33khz左右,mos管用
2017-07-09 17:13:05
基于光電導(dǎo)航的無(wú)人駕駛智能車下個(gè)月學(xué)校舉行這個(gè)智能車比賽,比在相同路段跑的時(shí)間,看到這個(gè)題目,沒(méi)有任何思路。。望高手指教下,原理圖,設(shè)計(jì)思路。。都可以!!謝謝~
2013-04-03 22:53:19
簡(jiǎn)易智能車元件,制作及開源代碼,謝謝!那
2016-04-07 18:00:18
朋友組隊(duì)前言 此篇獻(xiàn)給GDOU的學(xué)子們,或許不是那么政治正確一、智能車是什么智能車總體概要智能車是大學(xué)生團(tuán)體比賽,通常由三個(gè)人組成隊(duì)伍。涉及多個(gè)領(lǐng)域的知識(shí),包括計(jì)算機(jī)編程,涉及電路板,隊(duì)友間的團(tuán)隊(duì)協(xié)作,控制算法等。參加比賽的周期是比較長(zhǎng)的,涉及的領(lǐng)域如此之多,需要跨不同學(xué)科,因此需要投入的時(shí)間是比較多的
2022-01-17 07:48:55
等方面。小結(jié)本章重點(diǎn)分析了智能車系統(tǒng)總體方案的選擇,并介紹了系統(tǒng)的總體設(shè)計(jì),以及簡(jiǎn)要地分析了系統(tǒng)各模塊的作用。在今后的章節(jié)中,將對(duì)整個(gè)系統(tǒng)機(jī)械結(jié)構(gòu)、控制模塊和控制算法等三個(gè)方面的實(shí)現(xiàn)進(jìn)行詳細(xì)介紹。第二章
2013-05-07 23:40:08
,可應(yīng)用于對(duì)電機(jī)轉(zhuǎn)速要求非常的場(chǎng)合缺點(diǎn)是該方式通常比較復(fù)雜 , 成本較高 , 尤其是要提高驅(qū)動(dòng) 的功率時(shí) , 相應(yīng)的電路成本將提升很多 。本資料針對(duì)H橋驅(qū)動(dòng)電路在智能車競(jìng)賽中的應(yīng)用加以分析 。在設(shè)計(jì)H橋驅(qū)動(dòng)
2020-06-28 14:27:03
、測(cè)速電路以及其他電路構(gòu)成;智能車系統(tǒng)通過(guò)藍(lán)牙接收到的偏移角調(diào)整控制舵機(jī)的輸出脈沖,以此達(dá)到修正舵機(jī)打角的效果;速度控制由智能車系統(tǒng)通過(guò)驅(qū)動(dòng)電路控制電機(jī)的轉(zhuǎn)速控制來(lái)完成。通過(guò)轉(zhuǎn)向控制與速度控制,車模可以
2018-10-24 19:17:51
各位精英們!請(qǐng)問(wèn)如何寫計(jì)劃方案?要做智能車的計(jì)劃方案?拜托各位熱心幫助一下?
2012-04-08 13:04:40
智能車設(shè)計(jì)基礎(chǔ) 第10章.rar http://filemarkets.com/file/bai2471/9d9e6c95/智能車設(shè)計(jì)基礎(chǔ) 第3章.rar: http://www.t00y.com
2012-10-21 21:11:12
大神們,為啥我用這個(gè)電路驅(qū)動(dòng)電機(jī),老是燒驅(qū)動(dòng)芯片IR2104S?
2018-12-11 19:11:49
H橋式驅(qū)動(dòng)電路導(dǎo)通原理是什么?什么是自舉升壓呢?使用IR2104芯片具有哪些優(yōu)點(diǎn)?
2021-10-15 08:39:15
PID的智能車控制算法研究
2016-07-18 20:07:41
求大神 給個(gè) 關(guān)于智能車仿真的labview程序
2016-05-04 13:04:38
最近在做智能車的材料,想用Labview實(shí)現(xiàn)控制,發(fā)現(xiàn)了例程中的這個(gè)用模糊算法控制倒車的程序文件,感覺(jué)受益很大,特意發(fā)到這里,希望有需要的同學(xué)也能有點(diǎn)收獲。
2016-02-05 14:55:05
目錄第4篇實(shí)戰(zhàn)案例篇第16章 智能車控制系統(tǒng) 該書叫什么名字
2015-04-25 15:15:52
智能車設(shè)計(jì)報(bào)告設(shè)計(jì)目標(biāo): 小車能夠檢測(cè)20khz的信號(hào)源 并以較快的速度沿著信號(hào)線移動(dòng)。總體方案設(shè)計(jì):總體分為硬件軟件兩部分硬件部分:(1):驅(qū)動(dòng)系統(tǒng) (2):轉(zhuǎn)向系統(tǒng) (3):電源 (4):信號(hào)
2021-08-23 07:19:49
本文是根據(jù)第三屆全國(guó)大學(xué)生“飛思卡爾”杯智能汽車大賽要求設(shè)計(jì)自主識(shí)別道路的智能車。整個(gè)系統(tǒng)采用了組委會(huì)提供的16位單片機(jī)mc9s12dg128為核心,模型車本身帶有差速器和后輪驅(qū)動(dòng),需要設(shè)計(jì)完成基于單片機(jī)的自動(dòng)控制系統(tǒng)使得模型車在封閉的跑道上自主循線運(yùn)行。
2020-08-05 06:28:21
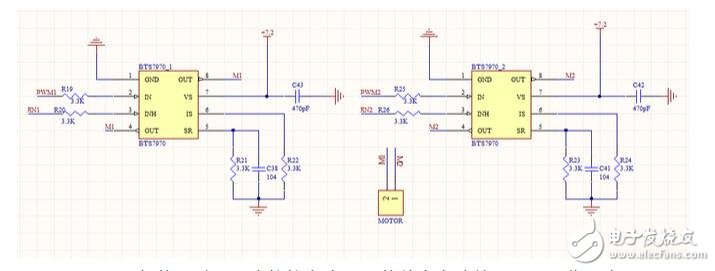
新人求問(wèn),最近需要用兩個(gè)IR2104的芯片搭一個(gè)全橋驅(qū)動(dòng)電路使電機(jī)正反轉(zhuǎn),電路原理圖如下,現(xiàn)在驅(qū)動(dòng)時(shí)出現(xiàn)了以下的問(wèn)題1.驅(qū)動(dòng)NMOS管的電壓我用的是13v的但實(shí)際電機(jī)兩端的電壓只有10v,想知道
2018-04-20 15:19:44
最近在用ir2104做mos管的驅(qū)動(dòng),輸入占空比固定大概是85%的樣子的pwm波。但是就是不出波。怎么回事呢。我是這樣接的,下圖
2017-04-05 07:40:46
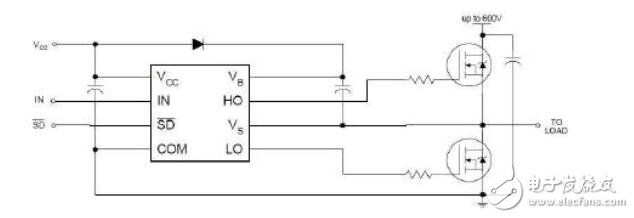
IR2104驅(qū)動(dòng)原理–恩智浦智能車電機(jī)驅(qū)動(dòng)本文是小編在準(zhǔn)備智能車比賽過(guò)程的學(xué)習(xí)筆記,關(guān)于對(duì)IR2104電機(jī)半橋驅(qū)動(dòng)的一些自我見解(歡迎指正)這個(gè)是數(shù)據(jù)手冊(cè)給的應(yīng)用電路,主要的外圍器件有兩個(gè)電容和一個(gè)
2021-09-06 07:45:43
` 本帖最后由 windworld 于 2017-2-25 09:49 編輯
分享之前畫的飛思卡爾主板電路和之前智能車驅(qū)動(dòng)電路,僅供大家學(xué)習(xí)!`
2015-08-26 21:22:13
首先是閱讀IR2104這個(gè)芯片的數(shù)據(jù)手冊(cè),引腳定義我就不說(shuō)了,劃重點(diǎn)部分是輸入側(cè)的電壓范圍。特別注意SD接高電平時(shí)才能發(fā)揮IR2104的作用,可以直接與供電管腳相連。下面就是仿真驗(yàn)證:0和5V
2021-12-02 07:29:16
智能車系統(tǒng)以—個(gè)標(biāo)準(zhǔn)的汽車模型作為載體,要求實(shí)現(xiàn)在白色場(chǎng)地上,通過(guò)轉(zhuǎn)向和車速的控制 ,使其自動(dòng)地沿著一條任意給定的黑色帶狀引導(dǎo)線行駛,在保證穩(wěn)定性的前提下以最短的時(shí)間完成 自動(dòng)尋跡。在該智能車系統(tǒng)中
2023-09-19 08:03:50
這個(gè)是國(guó)外的開源的DIY項(xiàng)目。[size=16.0016px]H-Bridge是圍繞國(guó)際整流器的IR2104 IC設(shè)計(jì)的,該板主要用于直流電機(jī)應(yīng)用,驅(qū)動(dòng)器可以處理高達(dá)8-10安培的負(fù)載,我已經(jīng)用
2018-10-22 13:38:04
求各位大神分享資料軟件實(shí)現(xiàn)智能車的控制系統(tǒng)飛思卡爾
2015-04-26 23:15:19
的舵機(jī)驅(qū)動(dòng)前輪轉(zhuǎn)向,使用符合PI算法的控制器實(shí)現(xiàn)直流電機(jī)的調(diào)速。為了使智能車快速、平穩(wěn)地行駛,系統(tǒng)必須把路徑識(shí)別、相應(yīng)的轉(zhuǎn)向伺服電機(jī)控制以及直流驅(qū)動(dòng)電機(jī)控制準(zhǔn)確地結(jié)合在一起。 1 硬件設(shè)計(jì) 本系統(tǒng)硬件
2018-11-06 15:08:45
我們要設(shè)計(jì)的智能車具有多種功能,可實(shí)現(xiàn)wifi遠(yuǎn)程控制,主人可遠(yuǎn)程監(jiān)控并控制房屋內(nèi)的各種設(shè)置
2013-10-20 11:13:08
``大神們 幫幫忙!誰(shuí)能給我點(diǎn)智能車差速轉(zhuǎn)向的資料! 我畢業(yè)設(shè)計(jì)做的是一個(gè)只能小車 小車的轉(zhuǎn)向機(jī)構(gòu)我想了兩種方案 一種是后輪雙直流電機(jī)驅(qū)動(dòng)差速轉(zhuǎn)向 另一種是后輪驅(qū)動(dòng)+舵機(jī)轉(zhuǎn)向。我想找點(diǎn)差速轉(zhuǎn)向的資料 可是網(wǎng)這這資料真的不好找啊。誰(shuí)有收藏的這方面的資料發(fā)我一點(diǎn)參考參考!``
2012-10-26 15:25:27
labview程序控制NI智能車,怎么控制該智能車轉(zhuǎn)彎時(shí)的角度沒(méi)有大的偏差??老師給的程序看不懂?程序如圖
2016-12-15 23:09:00
,且優(yōu)勢(shì)十分明顯。目前每車平均28個(gè)電機(jī),預(yù)計(jì)兩年之后會(huì)上升至30個(gè)。電機(jī)離不開驅(qū)動(dòng)和 控制裝置。英飛凌智能車用電機(jī)之驅(qū)動(dòng)芯片已經(jīng)發(fā)展到第三代TLE986x、TLE987x,可以覆蓋直流電機(jī)和直流
2018-12-12 09:48:42
智能車系統(tǒng)是由哪些模塊組成的?如何利用MCU核心板去實(shí)現(xiàn)智能車系統(tǒng)設(shè)計(jì)?
2021-10-26 08:06:54
巡線智能車控制中的CNN網(wǎng)絡(luò)有何應(yīng)用?嵌入式單片機(jī)中的神經(jīng)網(wǎng)絡(luò)該怎樣去使用?如何利用卷積神經(jīng)網(wǎng)絡(luò)去更好地控制巡線智能車呢?
2021-12-21 07:47:24
如何制作一輛智能車?
2022-02-15 07:39:21
IR2104芯片輸入側(cè)的電壓范圍是多少?如何對(duì)IR2104芯片的PWM波形進(jìn)行仿真呢?
2021-12-21 07:30:49
如何快速入門智能車呢?有哪些方法呢?
2021-11-01 07:52:06
的功能吧:基于51單片機(jī),利用火焰感應(yīng)、溫度傳感、GSM、尋跡和驅(qū)動(dòng)等多個(gè)模塊,實(shí)現(xiàn)對(duì)倉(cāng)庫(kù)或有毒易燃物品的無(wú)人化二十四小時(shí)監(jiān)控,更靈敏更經(jīng)濟(jì)。可以實(shí)現(xiàn)智能車在閉環(huán)控制以及接受智能車對(duì)于倉(cāng)庫(kù)的監(jiān)控信息反饋
2014-04-29 00:11:42
”的庫(kù)中即有TL494。“International Rectifier”文件夾中,名為“IR Interface Bridge Driver”的庫(kù)中即有IR2104。上述芯片所在庫(kù)鏈接:鏈接
2020-04-16 17:52:19
怎么實(shí)現(xiàn)智能車磁導(dǎo)航中的信號(hào)調(diào)理電路設(shè)計(jì)?智能車控制電路對(duì)檢測(cè)信號(hào)的要求是什么?
2021-05-12 06:04:02
本文介紹了一種智能車控制系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)方法。通過(guò)大量實(shí)驗(yàn)測(cè)試證明,該智能車能快速平穩(wěn)地在制作的賽道上跟蹤黑色引導(dǎo)線并行駛,而且尋跡效果良好,控制響應(yīng)速度快,動(dòng)態(tài)性能良好,穩(wěn)態(tài)誤差小,系統(tǒng)的穩(wěn)定性和抗干擾能力強(qiáng)。
2021-05-18 06:46:48
本人用了三款ir2104,但是產(chǎn)品的成品率太低,不知道怎么區(qū)分ir2104是否為原裝,并且想知道原裝去哪里買
2017-07-15 01:05:39
智能車競(jìng)賽背景全國(guó)大學(xué)生智能車競(jìng)賽是一項(xiàng)舉辦了十四屆的大學(xué)生自動(dòng)控制類科技競(jìng)賽,它要求指定的車模能夠在規(guī)定的賽道上實(shí)現(xiàn)路徑識(shí)別、自主尋跡,并快速行駛。麻雀雖小,五臟俱全,雖然競(jìng)賽智能車沒(méi)有現(xiàn)實(shí)生活中
2021-07-29 06:00:40
怎樣去設(shè)計(jì)一種基于CH32V103芯片的智能車呢?有哪些設(shè)計(jì)步驟?
2022-02-28 07:31:41
大神們 幫幫忙!誰(shuí)能給我點(diǎn)智能車差速轉(zhuǎn)向的資料! 我畢業(yè)設(shè)計(jì)做的是一個(gè)智能小車 小車的轉(zhuǎn)向機(jī)構(gòu)我想了兩種方案 一種是后輪雙直流電機(jī)驅(qū)動(dòng)差速轉(zhuǎn)向 另一種是后輪驅(qū)動(dòng)+舵機(jī)轉(zhuǎn)向。我想找點(diǎn)差速轉(zhuǎn)向的資料 可是網(wǎng)這這資料真的不好找啊。誰(shuí)有收藏的這方面的資料發(fā)我一點(diǎn)參考參考!
2012-10-26 15:27:33
求教ir2104各個(gè)管腳功能及電阻電容大小
2014-09-03 10:55:23
新人請(qǐng)教下,目前正在用一款ir2104的芯片做全橋驅(qū)動(dòng)電路,但其高端輸出部分的電壓始終只有三伏(測(cè)得HO和VS),想請(qǐng)教下是哪邊出了問(wèn)題,是芯片本身的升壓極限就是那么多還是我電路搭的不對(duì)附上原理圖和典型電路
2018-04-22 08:27:56
方案分析74 芯片的介紹73.2.1 主控芯片及其各部分性能83.2.2 SPCE061A用于語(yǔ)音遙控智能小車中的功能103.3 無(wú)線語(yǔ)音遙控智能車電機(jī)驅(qū)動(dòng)控制方案155 系統(tǒng)設(shè)計(jì)方案154.1系統(tǒng)整體
2012-07-31 22:12:51
;catid=57樹莓派智能車AlphaBot教程1:人生若只如初見 ...樹莓派智能車AlphaBot教程2:直流電機(jī)控制 ... 樹莓派智能車AlphaBot教程3:避障樹莓派智能車AlphaBot
2017-05-15 15:39:34
做一個(gè)攝像頭的智能車
2014-10-14 11:31:45
求一套智能車設(shè)計(jì),本人想要做智能車方面的,借鑒一下。
2015-11-10 00:37:42
就是一個(gè)buck-boost升降壓電路,驅(qū)動(dòng)選的ir2104,MOSFET用的是IRF540,,,芯片電壓12V,單片機(jī)頻率40kHz,調(diào)了好幾天,一直沒(méi)調(diào)出來(lái),而且還老燒單片機(jī)的IO口,輸出端只有電容上的電壓,各位幫看一下哪有錯(cuò)誤?
2014-08-04 19:37:25
最近在用ir2104做mos管的驅(qū)動(dòng),輸入占空比固定大概是85%的樣子的pwm波。但是就是不出波。怎么回事呢。我是這樣接的,下圖
2017-04-05 07:39:12
IGBT驅(qū)動(dòng)芯片IR2104的使用。 通過(guò)用arduino來(lái)控制IR2104芯片驅(qū)動(dòng)半橋IGBT功率管,通過(guò)上位機(jī)串口控制實(shí)現(xiàn)輸出不同占空比的偽模擬電壓信號(hào)。主要知識(shí)點(diǎn)是電路板設(shè)計(jì)和上位機(jī)編程實(shí)現(xiàn)
2023-03-27 14:57:37
6V、驅(qū)動(dòng)電路12V、CCD/編碼器5V。下面就轉(zhuǎn)壓電路做一些相關(guān)介紹。 一.電源轉(zhuǎn)壓模塊 所謂電源轉(zhuǎn)壓是將輸入電壓通過(guò)轉(zhuǎn)壓電路實(shí)現(xiàn)升/降壓功能以供其他模塊使用,智能車制作中,輸入電池電壓為7.2V
2019-10-14 07:00:00
想要做一個(gè)智能車,但是不知道怎么動(dòng)手,特別是不知道在哪里可以買到芯片。而且我是一個(gè)小白,沒(méi)有做過(guò)單片。求組隊(duì)?
2015-06-17 13:40:12
7815也不能正常輸出電壓,ir2104一上電特別燙,實(shí)在不懂什么原因,求指點(diǎn)...
2016-03-27 21:57:28
設(shè)計(jì)目標(biāo):①軟件設(shè)計(jì)基于單片機(jī)的智能車系統(tǒng);②實(shí)現(xiàn)操作界面登錄功能;③實(shí)現(xiàn)管理員操作系統(tǒng)界面功能;④實(shí)現(xiàn)用戶操作系統(tǒng)界面功能;⑤實(shí)現(xiàn)智能車控制系統(tǒng)界面功能。求各位大神指點(diǎn)迷津,先實(shí)現(xiàn)無(wú)線遙控模塊
2015-04-26 20:55:15
設(shè)計(jì)目標(biāo):軟件設(shè)計(jì)基于單片機(jī)的智能車系統(tǒng)(飛思卡爾)如何實(shí)現(xiàn)上位機(jī)與下位機(jī)之間的通信
2015-04-21 23:13:14
坐標(biāo)給受控端(基于“安芯一號(hào)”的智能車)受控端主要實(shí)現(xiàn)用戶路徑的識(shí)別、機(jī)器人行進(jìn)速度和方向的確定等,并將最終的速度、方向計(jì)算結(jié)果通過(guò)無(wú)線方式發(fā)送到小車控制板,以實(shí)現(xiàn)智能車行進(jìn)的控制,智能車行進(jìn)的速度
2013-10-15 12:46:58
網(wǎng)上的資料,舵機(jī)好像只能實(shí)現(xiàn)一個(gè)方向轉(zhuǎn),可是某些智能車怎么怎么依靠舵機(jī)實(shí)現(xiàn)左右轉(zhuǎn)向呢???
2019-06-24 00:23:41
飛思卡爾智能車控制PWM的引腳在哪
2017-02-28 19:49:16
誰(shuí)有智能車的芯片K60的資料啊?麻煩發(fā)一份,謝謝。
2013-01-12 17:10:40
驪微電子是芯朋微一級(jí)代理商,提供ID7U603單相無(wú)刷電機(jī)專用驅(qū)動(dòng)芯片,可兼容替換IR2104,更多驅(qū)動(dòng)產(chǎn)品手冊(cè) 、應(yīng)用料資請(qǐng)向驪微電子申請(qǐng)。>>
2021-12-22 14:33:00
供應(yīng)ID7U603SEC-R1 600V高速功率MOSFET和IGBT半橋驅(qū)動(dòng)芯片可代換IR2104,提供ID7U603SEC-R1關(guān)鍵參數(shù) ,更多產(chǎn)品手冊(cè)、應(yīng)用料資請(qǐng)向芯朋微代理商深圳市驪微電子申請(qǐng)。>>
2023-07-20 14:10:05
本文開始介紹了ir2104特點(diǎn)與ir2104技術(shù)參數(shù),其次介紹了ir2104引腳圖及功能說(shuō)明,介紹了ir2104絕對(duì)最大額定值、推薦工作條件及電氣特性,最后介紹了ir2104功能框圖及ir2104半橋驅(qū)動(dòng)器應(yīng)用電路圖。
2018-03-04 13:56:19 236687
236687 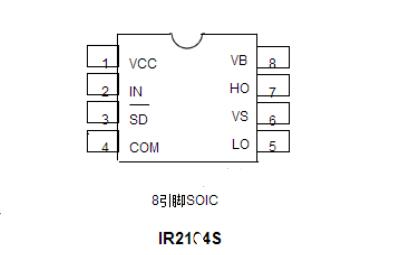
該Ir2104(S)是高電壓,高速功率MOSFET和IGBT驅(qū)動(dòng)器與依賴高和低側(cè)參考輸出通道。專有的HVIC和閂鎖免疫CMOS技術(shù)使堅(jiān)固的單片結(jié)構(gòu)。邏輯輸入與標(biāo)準(zhǔn)CMOS或LSTTL輸出兼容,降低
2018-07-17 08:00:00 175
175 IR2104(S)是高壓、高速功率MOSFET和IGBT驅(qū)動(dòng)器,具有獨(dú)立的高、低壓側(cè)參考輸出通道。專有的HVIC和鎖存免疫CMOS技術(shù)使加固單片結(jié)構(gòu)成為可能。邏輯輸入與標(biāo)準(zhǔn)CMOS或LSTTL輸出
2020-04-28 08:00:0049 H橋是圍繞國(guó)際整流器公司的IR2104集成電路設(shè)計(jì)的,該電路板主要用于直流電機(jī)應(yīng)用,驅(qū)動(dòng)器可以處理高達(dá)8-10安培的負(fù)載,我用36V直流電源測(cè)試了該電路板,電路使用國(guó)際整流器的N通道IR
2020-07-21 08:00:0046 首先,本人參考了 《大功率直流馬達(dá)的驅(qū)動(dòng)ABU ROBOCON 2005比賽之動(dòng)力方案》 按照這個(gè)原理圖,我熱轉(zhuǎn)印制作了單個(gè)全橋的實(shí)驗(yàn)電路。個(gè)別的電阻電容值有所變動(dòng)。 實(shí)物截圖: 上電并給予有效
2020-12-07 10:30:214778 首先是閱讀IR2104這個(gè)芯片的數(shù)據(jù)手冊(cè),引腳定義我就不說(shuō)了,劃重點(diǎn)部分是輸入側(cè)的電壓范圍。特別注意SD接高電平時(shí)才能發(fā)揮IR2104的作用,可以直接與供電管腳相連。下面就是仿真驗(yàn)證:0和5V
2021-11-23 17:06:2342 本周復(fù)習(xí)了BUCK電路降壓原理,用TL494控制輸出的PWM波,用IR2104將PWM波放大,從IR2104兩個(gè)輸出端口的輸出的兩個(gè)相反相位的PWM控制MOS管開關(guān),同時(shí),在輸出端,接一個(gè)測(cè)量電阻
2022-01-11 12:56:5082 半橋驅(qū)動(dòng)器ir2104中文數(shù)據(jù)手冊(cè)免費(fèi)下載。
2022-05-16 16:00:4835 電子發(fā)燒友網(wǎng)站提供《DGD2103和DGD2104在IR2103和IR2104中的應(yīng)用.pdf》資料免費(fèi)下載
2023-07-24 16:11:121 ID7U603是一款基于P襯底、P外延的高壓、高速功率MOSFET和IGBT半橋驅(qū)動(dòng)芯片,可兼容代換IR2104,應(yīng)用領(lǐng)域于中小型功率電機(jī)驅(qū)動(dòng)、功率MOSFET或IGBT驅(qū)動(dòng)、照明鎮(zhèn)流器、半橋驅(qū)動(dòng)
2023-03-29 09:24:35935 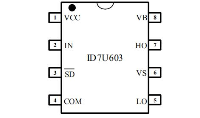
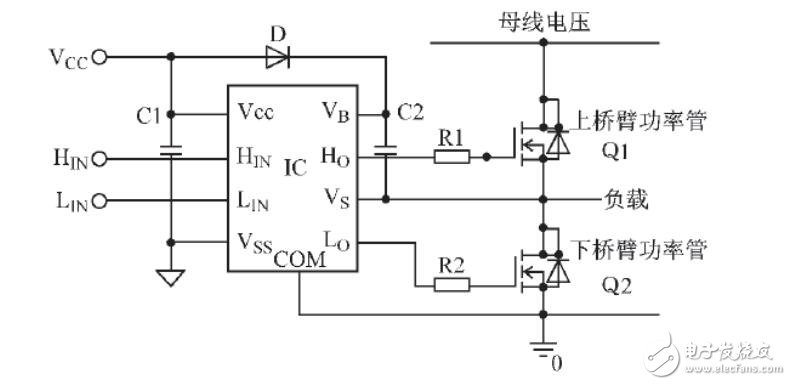
全橋驅(qū)動(dòng)電路原理 IR2104是一種高速、低成本的高和低電平電荷泵驅(qū)動(dòng)器。它可通過(guò)邏輯輸入信號(hào)控制兩個(gè)N溝MOSFET或IGBT的驅(qū)動(dòng)信號(hào),實(shí)現(xiàn)全橋輸出。IR2104內(nèi)部集成了一個(gè)高壓引發(fā)電荷泵、邏輯電平和電流檢測(cè)電路。其主要包括低側(cè)和高側(cè)驅(qū)動(dòng)器。 低側(cè)驅(qū)動(dòng)器:
2024-01-05 16:11:041122
 電子發(fā)燒友App
電子發(fā)燒友App













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論