

引言:
智能網聯汽車產業在全球范圍內的快速發展對交通環境感知技術提出了越來越高的要求.毫米波雷達憑借其全天時全天候可靠工作的特點和相對較低的成本,成為智能網聯汽車不可或缺的交通環境感知設備.然而,隨著車載雷達滲透率的逐步提升,雷達間的互干擾變得不可忽視,來自其他雷達的干擾會降低本雷達檢測概率或提升虛警概率,對行駛安全或舒適性造成負面影響.為了解決該問題,本文給出了一種主動干擾協同方法,稱為快速干擾偵聽和規避技術(Fast Interference Sensing and Avoidance,FISA),并通過仿真驗證了該方法相比于現有隨機跳頻技術能夠顯著降低互干擾的發生概率.
毫米波雷達憑借其全天時全天候可靠工作的特點和相對較低的成本, 成為 智能網聯汽車不可或缺的交通環境感知設備。然而 , 隨著車載雷達滲透率的逐步提升, 雷達間 的互干擾變得不可忽視, 來自其他雷達的干擾會降低本雷達檢測概率或提升虛警概率, 對行駛安全或舒適性造成負面影響 。 為了解決該問題, 本文給出了一種主動干擾協同方法, 稱為快速干擾偵聽和規避技術( Fast Interference Sensing and Avoidance,FISA ), 并通過仿真驗證了該方法相比于現有隨機跳頻技術能夠顯著降低互干擾的發生概率。 隨著智能網聯汽車及產業在全球范圍內的快速發展,交通環境感知技術的滲透率也逐年上升。交通環境感知技術涵蓋毫米波雷達、激光雷達和攝像頭等信息感知技術 [1] ,是智能網聯汽車的核心技術,其應用充分反映了智能網聯汽車的智能化程度,同時與智能網聯汽車的安全性息息相關。毫米波雷達憑借高分辨率和精度、 全天候可靠工作和較低的成本等優點,已成為智能網聯汽車不可或缺的交通環境感知設備。 隨著自動駕駛不斷向高級別演進, L4/L5 級自動駕駛單輛車需要裝配 10 個以上毫米波雷達, 在十字路口 、道路環線和高架橋等復雜路況下, 毫米波雷達間的互干擾將對行駛安全和舒適性造成負面影響。目前, 車載毫米波雷達均在非合作模式下運行,也沒有行業間的協調方案解決干擾問題。 例如, 在雷達干擾比較大的時候, 采用頻率上隨機跳頻、時間上隨機錯開是當前比較普遍使用的干擾規避的手段 [2] 。隨機使用資源在干擾不算密集的時候是一種比較有效的方法, 但是當干擾源密集的情況下, 隨機使用資源較大概率容易造成資源使用沖突和使用不充分。 一種高效地解決雷達間的干擾問題的方法是雷達之間的主動干擾協同 [3] , 比如通過政府機構或多雷達廠商之間進行頻段資源協調,通過頻段或信道劃分建立通用規范, 使雷達工作在不同的正交時頻范圍內,主動避免干擾的發生,我們稱這種通過協調避免雷達干擾的方案為“協同方案”。在必要的情況下,還需出臺相應的強制性標準或法規進行統一要求與管理。 在此背景下, 雷達快速干擾偵聽和 規避技術( Fast Interference Sensing and Avoidance, FISA ) 應運而生。FISA 技術在統一劃分頻域柵格、規定載波起始頻率的情況下, 規范了雷達進行干擾偵聽和主動規避干擾的技術要求。該技術降低了互干擾情況發生的概率, 保證了頻譜資源使用的公平性, 也使得頻譜資源得以高效利用。 本文首先介紹雷達偵聽原理;其次詳細闡述FISA 技術, 其中包括該技術的概述、起始頻點的定義、 技術機理以及關鍵參數;然后利用仿真驗證了FISA 技術相比于現有隨機跳頻技術能夠顯著降低互干擾的發生概率;最后得出結論, 并對下一步工作進行展望。
雷達偵聽原理
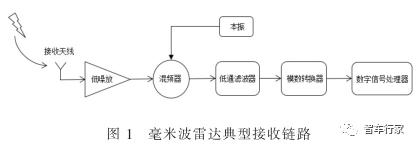
雷達偵聽是通過雷達的接收鏈路實現的, 如圖1 所示為汽車毫米波雷達典型接收鏈路。雷達偵聽過程如下: 首先, 利用雷達接收天線接收空間中的電磁波,得到射頻接收信號;然后, 將射頻接收信號經過低噪聲放大器(簡稱低噪放)后與本地振蕩器(簡稱本振)提供的本地振蕩信號進行混頻處理, 再經過低通濾波器后得到中頻信號;最后, 利用模數轉換器對中頻信號進行采樣得到中頻采樣信號,對中頻采樣信號進行分析得到最后的偵聽結果。
FISA技術

2.1 概述
本節內容主要包含起始頻點的定義、 FISA 技術機理和 FISA 門限及偵聽物理量這幾部分內容。在展開介紹之前, 首先定義幾個術語概念。
1 ) 調頻連續波 (Frequency Modulated ContinuousWave, FMCW) , 指頻率隨時間線性變化的毫米波雷達信號波形。
2 ) 工作時頻資源 ( Operating Frequency/TimeResource, OFTR ), 指用于承載雷達目 標探測所用的雷達波形所占用的時頻資源。
3 )候選 OFTR , 指雷達可支持的工作時頻資源,雷達通過偵聽機制決定未來是否使用該 OFTR 。
4 ) 頻域柵格( Frequency Raster, FR ), 指頻域資源劃分后, 相鄰兩個頻率起點之間的頻率差。
5 )時域柵格( Time Raster, TR ), 指時域資源劃分后, 相鄰兩個時間起點之間的時間差。
6 )幀( Frame ), 指雷達目標探測時, 在時間維度上的周期性工作時段。其時間長度典型值為 50ms 。
7 )發射時段( Transmission Duration, TD ), 指在一次目標探測中, 雷達發送的連續多個雷達探測信號的時間間隔, 探測信號如線性調頻連續波信號或脈
沖信號。其時間長度典型值為 5ms , 10ms , 20ms 等。
8 ) 空閑時段( Idle Duration, ID ), 指兩次連續發射時段之間, 雷達不發射目 標探測信號的時間間隔。其時間長度典型值為 30ms , 40ms 等。
9 )干擾底噪提升比( Interference over Noise, IoN ),毫米波雷達在被干擾之后的干擾功率和噪聲功率之和與被干擾之前的噪聲功率的比值。其數學表達式為:

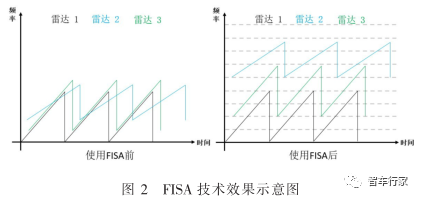
其中 I 為干擾功率值, N 為雷達接收機噪聲功率值。FISA 技術簡單理解就是首先通過干擾偵聽掌握雷達工作時頻資源(即 OFTR )的受干擾情況, 然后基于該情況選擇合適的 OFTR 進行工作, 從而使雷達可以適應復雜電磁環境變化的技術。 如圖 2 所示, 是多部雷達使用 FISA 前后, 其雷達信號的時頻圖。可以看到在使用 FISA 前, 多部雷達的信號有可能會使用非常接近的時頻資源, 使得雷達之間的互干擾較嚴重;而使用了 FISA 技術之后, 多部雷達在劃分好的信道上工作, 并且充分的使用了頻譜資源, 很大程度減少了雷達之間的互干擾問題。
2.2 起始頻點定義
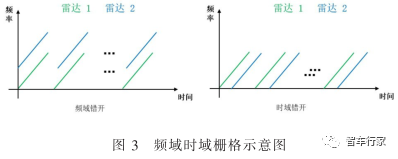
考慮到頻譜資源的稀缺性,如果放任雷達隨意選擇工作頻率,不同雷達所占時頻資源易出現不可控的資源重疊,引發干擾并會造成總頻譜資源的浪費。因此, 可以引 入一定的時頻資源使用規則, 使不同雷達在預定義好的“正交”信道上工作, 從而互干擾更可控且資源使用更緊湊合理。 “正交”信道并非指兩個信道時頻資源完全不重疊, 而是基于雷達的工作原理, 不同的雷達波形在頻域和時域上錯開一定的間隔(柵格), 使得干擾接收信號與發射信號的差頻在彼此目 標中頻的觀察范圍之外即可, 如圖 3所示。這種方式可以達到在有限時頻資源內支持更多互干擾較小的波形,提升頻域資源使用效率。
由于不同雷達的工作帶寬是多樣化的, 我們可以以上述頻域柵格方式來約束雷達信號的起始頻點。考慮到目 前 77GHz 雷達的中頻帶寬普遍在 5~15MHz 之間, 我們選用 10MHz 作為頻域柵格的步長。 例如, 雷達信號起始頻點在 76-77GHz 的載波起點集合 Ω 中選擇, 其中載波起點集合 Ω 定義為:Ω={76+0.01×N} ( 2 )其中 N=0,1,2, … ,99 , 即集合一共有 100 個元素, 每個元素的單位是 GHz 。 按照如上起始頻點工作的雷達工作頻率范圍是互相重疊的, 如果雷達的中頻帶寬小于 10MHz , 雷達最小移動一個 FR , 就有可能完全避開干擾, 如果雷達的中頻帶寬大于 10MHz , 雷達移動多個 FR , 就有可能完全避開干擾, 這樣可以最大化的利用寶貴的頻譜資源。
2.3 FISA 技術機理
FISA 技術機理是指, 雷達通過偵聽候選 OFTR上的干擾信號, 確定其可用性的過程。例如, 當雷達設備檢測到候選 OFTR 上存在足夠強度的干擾時,判定當前候選 OFTR 不可用;當雷達設備檢測到候選 OFTR 上不存在足夠強度的干擾時, 判定當前候選 OFTR 可用, 則雷達接下來可在相應 OFTR 上發送雷達信號,該檢測過程稱為 OFTR 可用性檢測。 若雷達經過干擾偵聽判定候選 OFTR 不可用, 可以采用一系列規避措施, 例如通過更換頻率、更換時間、更換波形參數等規避干擾, 在其他候選 OFTR 上發送雷達信號。FISA 按執行步驟分為干擾偵聽和干擾規避。
2.3.1 干擾偵聽
考慮到功能安全要求, 雷達需要向總線輸出告警信號, 并且在必要的時候退出服務, 避免在干擾嚴重的情況下仍然向車身輸出不正確的結果, 造成不必要的事故。 雷達設備在正常工作期間應至少對當前工作的OFTR 執行干擾偵聽, 并通過雷達輸出接口 上報干擾程度, 可以將干擾程度劃分為“無干擾”、“有干擾”。雷達設備偵聽參數為被測 OFTR 上的雷達接收機處理后的接收機中頻處的 IoN 的值, 如公式 (1) 所示, 其中 N 為常溫無干擾時, 接收機處理后的噪聲底。 接收機干擾處理后的 IoN 計算是雷達接收機處理算法的一部分, 為雷達廠商實現, 與雷達芯片無關, 因此不涉及雷達芯片的修改, 輸出 具有可行性和必要性。偵聽可以在 ID 執行, 也可以在 TD 執行。偵聽周期為一幀 (典型值為 50ms ), IoN 的值為偵聽周期內的統計結果,
a ) 當 IoN< 門 限 T0 時, 雷達通過輸出接口上報“無干擾”信息;
b )當門限 IoN≥ 門限 T0 時, 雷達通過輸出接口上報“有干擾”信息, 并采取
2.3.2 節的干擾規避措施中的至少一種。
除了上述這種簡單的有無干擾程度劃分方式,也可以有其它更豐富的劃分方式。例如,可以將干擾程度劃分為三種狀態, 分別為“無干擾”、“干擾程度一”和“干擾程度二”。此時,
a ) 當 IoN< 門 限 T1 時, 雷達通過輸出接口上報“無干擾”信息;
b ) 當 門 限 T1≤IoN< 門 限 T2 時, 雷達通過輸出接口 上報“干擾程度一”信息, 并采取 2.3.2 節的干擾規避措施中的至少一種;
c )當 IoN≥ 門 限 T2 時, 雷達通過輸出接口上報“干擾程度二”信息, 并采取
2.3.2 節的干擾規避措施中的至少一種。本文給出的門限取值見 2.4 節。
2.3.2 干擾規避
雷達設備在偵聽到干擾后采用的干擾規避措施包括以下至少一種:
a )上報“有干擾”或者“干擾程度一或二”繼續使用原波形在當前工作的 OFTR 內發送雷達信號;
b )更換頻率在其他 OFTR 內 發送雷達信號, 更換后的雷達信號的起始頻點參照公式 (2);
c )更換時間在其他 OFTR 內發送雷達信號;
d ) 更換波形參數在當 前工作的 OFTR 或其他OFTR 內發送雷達信號;
e )暫停服務。
2.4 FISA 門限
本節從汽車相關標準定義的 雷達探測需求出發,討論了雷達應用的必要場景, 以得出 FISA 門限。 少量雷達的互干擾會造成距離 - 多普勒平面上某些特定位置的底噪大幅抬升, 造成某些具有特定特征的目標(一定距離, 一定速度)無法檢測, 也就是說, 少量雷達互干擾是有色的。假定在現實情況下,由于汽車的移動等原因, 雷達不會總被一種特定的干擾波形所干擾, 并且雷達通過現有的被動式干擾消除技術可以 解決這種少量的特定位置的有色干擾。 但是在雷達密度非常大的情況下,雷達的干擾體現為距離 - 多普勒平面大面積的底噪抬升, 這種情況下, 被動式干擾消除技術就會受限, 需要通過主動式協調,即干擾偵聽來規避干擾。 如 2.3.1 節所述, 雷達設備干擾偵聽的物理量是接收機處理后的接收機中頻處的 IoN 的值。由雷達方程, 假設只有干擾 I 和探測距離 R 是變量, 其它量固定, 得到 IoN 與探測距離變化之間的關系, 有,

其中 SNR 為雷達方程中雷達目 標檢測信噪比, S 為有用信號功率值, R 為雷達探測距離, 對應雷達最大探測距離, 即為沒有干擾時的探測距離,
對應雷達最大探測距離, 即為沒有干擾時的探測距離, 為雷達最大探測距離的最低需求, 即為考慮最大可容忍干擾時的探測距離。 依據參考文獻 [4] 的研究, 以及當前的高級駕駛輔助系統 ADAS ( Advanced Driving?Assistance System ) 標準 [5-7] , 基于目前業界典型雷達應用場景和雷達配置, 得到無干擾情況下的雷達最大探測距離, 并結合標準中規定的探測最大距離的最低需求和公式( 4 ), 推導出為了滿足該最低需求允許的雷達 IoN 的最大容忍值, 表 1 示出了典型場景下的結果。
為雷達最大探測距離的最低需求, 即為考慮最大可容忍干擾時的探測距離。 依據參考文獻 [4] 的研究, 以及當前的高級駕駛輔助系統 ADAS ( Advanced Driving?Assistance System ) 標準 [5-7] , 基于目前業界典型雷達應用場景和雷達配置, 得到無干擾情況下的雷達最大探測距離, 并結合標準中規定的探測最大距離的最低需求和公式( 4 ), 推導出為了滿足該最低需求允許的雷達 IoN 的最大容忍值, 表 1 示出了典型場景下的結果。
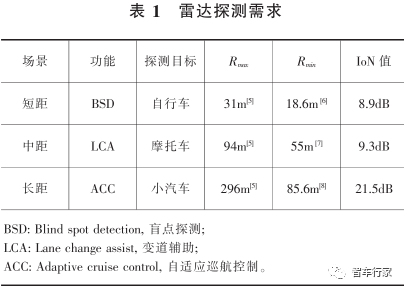
依據上表的分析, 雷達設備在接收機處理后的干擾偵聽的 IoN 應不大于上表最后一列計算出來的IoN 值, 否則, 雷達無法滿足探測的最低要求, 需要退出服務。綜合考慮上述各個典型場景下, 存在干擾時保證最大探測距離最低要求的 IoN 值, 選擇 8.9dB作為接收機處理后的干擾偵聽門限, 對應 2.3.1 節中的門限 T0 。 需要說明的是, 干擾程度如何劃分往往是雷達設備廠商與主機廠之間溝通協商確定的, 例如, 對于 2.3.1 節中三種狀態的干擾程度描述方式,同樣可以參照上述基于雷達探測需求來分析干擾偵聽門限的方法。
仿真測試
3.1 場景假設
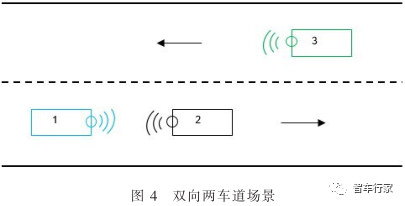
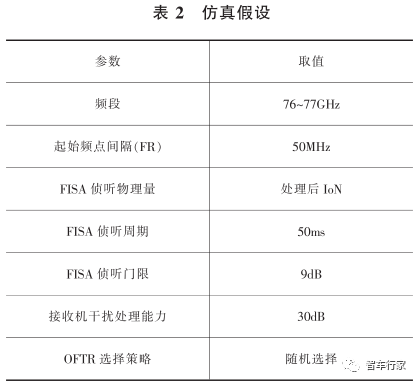
干擾仿真的場景為雙向兩車道場景, 如圖 4 所示, 箭頭為行車方向 , 場景中一共存在三輛車, 車 1和車 2 縱向距離 10 米, 車 1 和車 3 縱向距離 50 米,車道寬度 3.5 米。其中 1 號車和 3 號車在車頭位置各安裝了 一個前向 雷達, 2 號車在車尾位置安裝了一個后向雷達。 假設三部雷達都工作在 76-77GHz , 總帶寬為1GHz 的頻段上, 假設整個頻段按照 2.2 節所述的方式進行劃分( 50MHz FR ), 雷達采用的 FISA 偵聽周期為 50ms , FISA 偵聽物理量為接收機干擾處理后的IoN , FISA 偵聽門限為9dB , 接收機干擾處理能力為30dB , OFTR 選擇策略為隨機選擇, 即隨機從除了干擾超過偵聽門限的 OFTR 以外的其它候選 OFTR 中選擇工作時頻資源。
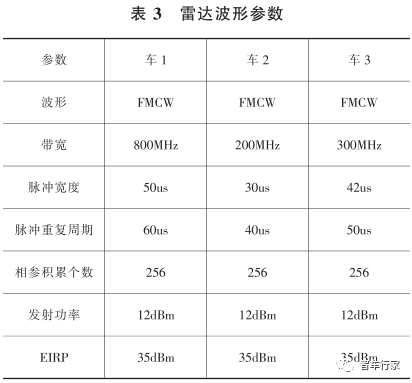
上述仿真假設總結見表 2 。另外, 三部雷達的波形參數配置如表 3 所示。仿真評價指標為無干擾幀比例, 即如圖 4 所示場景中所有雷達中頻的 IoN 都小于干擾偵聽門限的幀數與仿真中所有幀數的比值。另外, 仿真以多快照的形式進行, 每一個快照包含多個(例如, 20 幀) 雷達幀周期。所以無干擾幀比例的統計是將所有快照所包含的總幀數一起考慮的。
為了模擬干擾較密集場景,假設不同雷達同步發射探測信號,并且雷達只能跳頻,不能改變發射定時。
3.2 仿真結果及分析
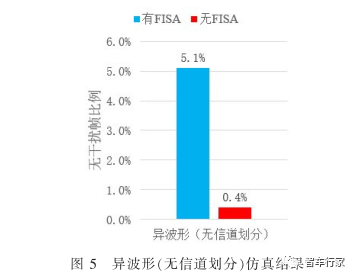
異波形(各雷達采用表 3 配置)情況下, 如果不對頻段進行信道劃分, 雷達可以在 76-77GHz 內隨意選擇起始頻點。采用 FISA 技術與不采用 FISA 技術時,無干擾幀比例仿真結果如圖 5 所示。整個仿真場景的無干擾幀比例在 采 用 FISA 技術前后 , 由0.4% 提升到 5.1% 。可見 FISA 技術在這種密集干擾場景下對整個場景的干擾緩解有較大益處。
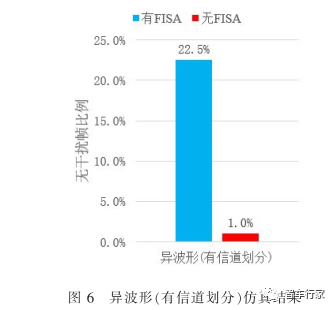
在上述配置情況下, 進一步對頻段進行信道劃分, 即雷達在 76-77GHz 內從劃分好的信道處選擇其工作的起始頻點。如圖 6 所示, 整個仿真場景的無干擾幀比例在采用 FISA 技術前后, 由 1% 提升到22.5% 。相比于無信道劃分時的 5.1% , FISA 技術在有信道劃分的情況下, 能夠進一步改善整個系統的干擾情況。
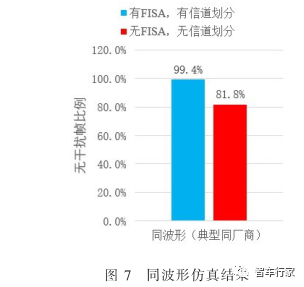
另外, 對比圖 5 和圖 6 可以發現, 信道劃分對無FISA 系統也能有性能改善。對于同廠商同型號雷達,即其波形參數相同。由于同斜率雷達之間的起始頻率只要略有間隔即可實現無干擾工作, 所以該情況可以看作是非密集干擾場景。 仿真結果如圖 7 所示, 采用了 FISA 技術并劃分信道時, 場景內車輛幾乎都可以工作在無干擾環境下, 其無干擾幀比例達到 99.4% , 而不采用 FISA技術并沒有劃分信道時, 無干擾幀比例為 81.8% , 即在這種非密集干擾場景, 也有將近 18% 的幀存在較嚴重干擾, 其原因就是雷達發射起始頻點隨意, 并且沒有采用 FISA 技術。
由上述仿真結果可以看出, 對頻段進行信道劃分并且采用 FISA 技術對保證雷達處在良好環境下工作, 從而提高其檢測概率, 降低虛警概率, 最終保障自動駕駛車輛的安全行駛意義重大。
結束語
毫米波雷達的互干擾問題是無人駕駛技術發展中亟待解決的問題。本文詳細介紹了雷達偵聽原理和 FISA 技術細節以及多種實現方式。通過多雷達廠商之間的協作, 建立一定的通用規范, 執行 FISA 機制, 可以主動避免干擾的發生, 保證對頻譜資源的公平使用。 FISA 機制一方面要求雷達設備在發送前主動偵聽頻率資源占用情況, 并調整發射頻率范圍至互干擾相對較小的資源上。另一方面,定義統一的頻域柵格, 合理規劃頻率資源的使用, 在降低多雷達資源沖突的同時提升頻域資源利用率。這種協作式抗干擾手段便于管理, 同時可以和已有的被動式干擾手段相結合, 提升雷達性能, 保障輔助駕駛和自動駕駛的安全性和舒適性。 在下一階段的研究工作中, 將結合產品實測結果進一步驗證 FISA 技術的可行性和可靠性。另 外,為了能夠發揮出 FISA 技術的優勢, 需要全行業的共同努力, 出臺相應的標準或法規進行統一要求與管理。 作者:宋思達, 馬莎, 吳茜
編輯:黃飛
-
無人駕駛
+關注
關注
98文章
4115瀏覽量
121966 -
汽車雷達
+關注
關注
15文章
102瀏覽量
33061 -
毫米波雷達
+關注
關注
107文章
1067瀏覽量
64913
原文標題:汽車雷達干擾偵聽和規避技術
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
ARM公司公開下一代ARM架構技術細節
低功耗藍牙的技術細節
應用Bluetooth Smart技術的全套智能騎行設備的技術細節和應用場景,不看肯定后悔
NGN網絡合法偵聽技術的研究與分析
英特爾Sandy Bridge處理器技術細節
MIT公布“盲動”機器人技術細節
意法半導體公布ST54J系統芯片(SoC)的技術細節
ETCD集群的工作原理和高可用技術細節介紹
一文解析鴻蒙系統誕生背景、技術細節生態圈
聊聊50G PON的技術細節

LED顯示屏的換幀頻率與刷新頻率:技術細節與市場發展

深入解析Zephyr RTOS的技術細節






 工商網監
工商網監

評論