 基于imu定位的方法,如何解決累積誤差?
基于imu定位的方法,如何解決累積誤差?
觀點一
沒人帶就是容易跳這種坑,我之前就傻不拉吉地花了一周時間做純imu定位。
做狀態估計,首先要明確一點:任何算法都不能突破傳感器本身的精度帶來的限制。以下這張圖片源自一篇關于imu的綜述(侵刪),
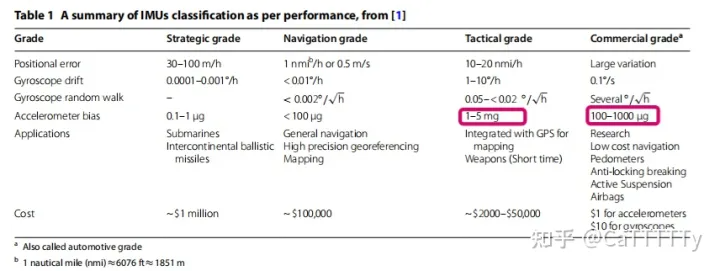
我標紅的部分是文章錯誤,兩個加速度bias位置放反了。
現在精度最好的imu一個小時會累積幾十米的誤差,價格上百萬美元,用在洲際彈道導彈上的(你老板買得起?)。幾萬美元價位的imu,一分鐘的位置誤差計算下來大概是5米,注意是一分鐘,由于加速度二次積分后,得到的位置與時間是二次關系,即位置誤差隨時間呈拋物線增長。
所以單純用imu加速度計做定位是很不現實的,希望新入門的同學別再跳這種坑了。
觀點二
基于IMU的定位(也就是我們通常稱為的慣性導航)本質上屬于航位推算定位,定位解算是基于運動積分的,之前定位結果中的定位誤差會累積到當前定位結果中,同時由于IMU本身的零偏,最終表現就是定位誤差會隨時間累積。
因此在實際應用中,需要同時結合其他定位誤差無累積的定位手段,如無線電導航(GPS、UWB等)或特征匹配定位(地形匹配、激光點云地圖匹配等),來實時輔助進行慣導誤差修正,才能一定程度上抑制誤差積累,滿足使用需求。
當然,如果確實沒有其他傳感器或定位手段可用,單獨使用IMU定位的話,為避免誤差過快累積,一方面,要對IMU做內參(零偏、刻度系數誤差等)標定;另一方面,要結合具體應用平臺和場景,考慮加入零速校正、零角度校正或運動約束等。
另外,僅僅用于航姿估計時,可以采用無人機領域常用的基于加速度和角速度輸出的互補濾波方法,給出精確的俯仰角和橫滾角。
觀點三
我自己沒有純IMU的經驗,但是可以分享下我知道的和我看到的看是否對題主有幫助。
1.買個非常貴的IMU: 最直接簡單暴力的方法,航天工程和軍用無人機里應該就是用了精度很高的IMU。而且據老板所說,有次SIGGRAPH還是什么會上有人演示過純IMU的SLAM系統,效果杠杠的,不過很貴很貴就是了。
2.結合具體應用場景的約束: 可以參考下 https://drive.google.com/file/d/1tQyz5DGklJvOyFqdr9z3fKDWOti6A8sZ/view 系列工作。
根據后續改進這個工作的同學的反饋,他能夠用IMU+LSTM的方式取得很好的結果,而且有意思的是用了LSTM的結果也只比step counting好一些。這說明在手持設備這種場景下勻速運動是個很強的先驗約束,如果題主的應用場景存在這種強先驗的話可以從這方面入手,而不是僅僅著眼IMU數據本身。
審核編輯 :李倩
-
傳感器
+關注
關注
2552文章
51217瀏覽量
754611 -
算法
+關注
關注
23文章
4620瀏覽量
93047 -
定位
+關注
關注
5文章
1336瀏覽量
35413
原文標題:基于imu定位的方法,如何解決累積誤差?
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
IMU中的misaligment誤差是如何區分Axis to axis與Axis to frame誤差的?
分析信號鏈中累積直流誤差最詳盡的方法
MSP430FR2311 中 UART 通訊的累積誤差分析計算和時鐘頻率優選
基于MSP430F149單片機設計的室外移動機器人組合導航定位系統
IMU誤差來源/表達式/標定
如何用不同的方法在信號中添加或累積誤差?
IMU的工作原理是什么?怎樣去搭建一種IMU誤差模型?精選資料分享
如何利用工業級IMU減少正交誤差的影響
全景圖像鑲嵌中累積誤差的分析與減少方法研究

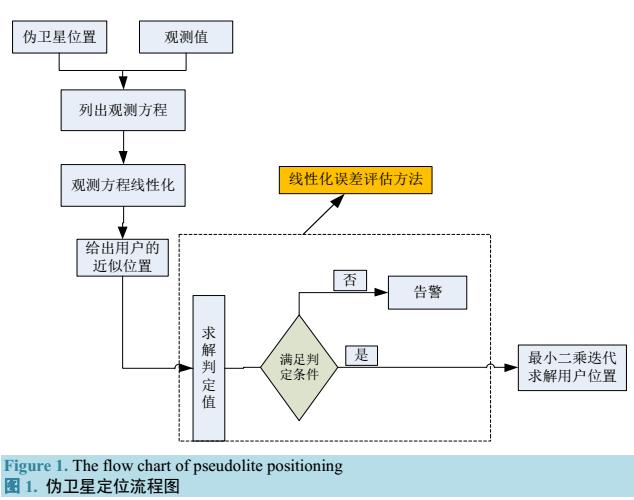
偽衛星定位線性化誤差評估方法
一種基于單目視覺的誤差檢測方法
自動駕駛高精組合導航設備拆解-導遠570D







 工商網監
工商網監
評論