 用于ROS移動機器人高集成電源解決方案(二)
用于ROS移動機器人高集成電源解決方案(二)
上篇文章,詳細分析了ROS移動機器人最大耗電電流,并根據鋰電池放電倍率,給出鋰電池的推薦選型。 具體分析可以在我的公眾號歷史文章中查看。 這篇文章,來介紹供電系統中的鋰電池均衡電路。
鋰電池為什么要均衡
由于鋰電池生產工藝的原因,在生產過程中每一塊鋰電池都會存在多多少少的差異。 比如鋰電池內阻的差異,容量的差異。 這就造成了鋰電池在串聯使用時,組內每塊電池在使用過程中出現容量不均衡的現象。
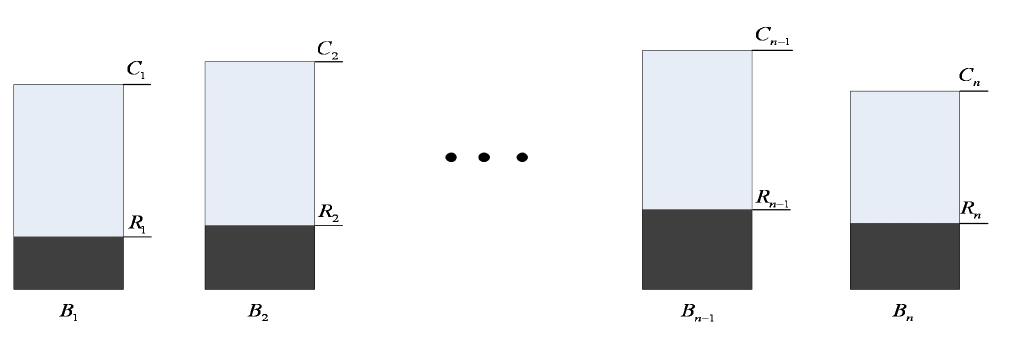
如上圖所示,高度為電池容量,在電池使用過程中由于內阻的差異,會慢慢出現容量不均衡的情況。
鋰電池組存在的短板效應,表示電池組中容量最小的電池決定了整個電池組的充電質量,也決定了電池組的壽命。
所以鋰電池組在使用過程中,需要給鋰電池加入均衡電路,在鋰電池每次充電程中對每塊鋰電池進行均衡。
鋰電池均衡原理
目前鋰電池最常用的兩種均衡技術分別是被動均衡和主動均衡。 主動均衡雖說具有被動均衡不可超越的優點,但其拓撲復雜,實現成本高,常用與電動汽車鋰電池均衡。 所以在這里只采用被動均衡技術。
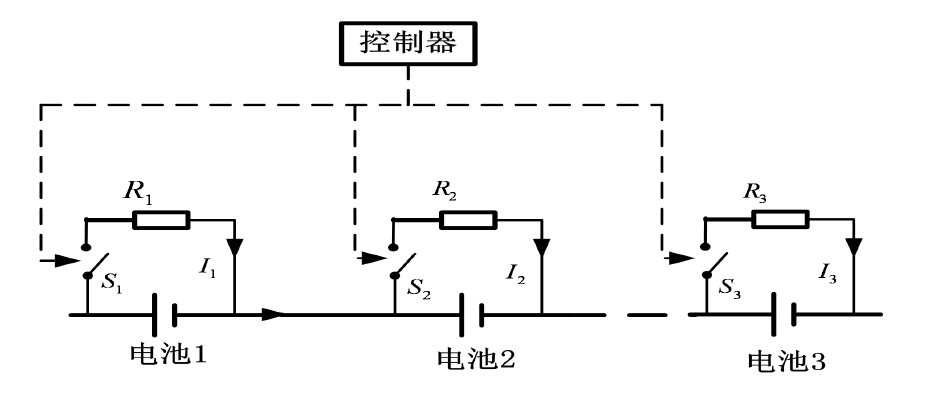
如上圖所示,被動均衡表示在電池組使用過程中出現不均衡現象時使用電阻消耗掉能量較多電池的能量,向最低容量電池看齊。 比如此時,三節電池容量分別為90%,92%,93%,這時均衡系統會通過控制電路將92%和93%的鋰電池使用電阻消耗掉能量,向容量為90%的那塊電池看齊。 當電池組充電時先充滿的電池同樣會使用電阻進行消耗能量,等待其余電池依次充滿電后才指示充電完成。
鋰電池均衡充電電路
由于單節鋰電池最大充電電壓為4.2V,當給三節鋰電充電時,其最大充電電壓應為12.6V。 充電器需要提供穩定充電電壓的同時還需要具有三段式充電功能(鋰電池三段式充電介紹可看公眾號第一個項目中相關文章)。 充電器的選擇,直接購買12.6V電源適配器即可。
下圖所示,為本系統中采用的鋰電池均衡方案。 使用三片HY2213,在鋰電池充電時,用來檢測每塊鋰電池電壓,如果當某一塊鋰電池電壓達到4.2V時,相應的HY2213就會控制MOS管打開,通過電阻消耗鋰電池能量,直到三塊鋰電池電壓都沖到4.2V時,此次充電結束。
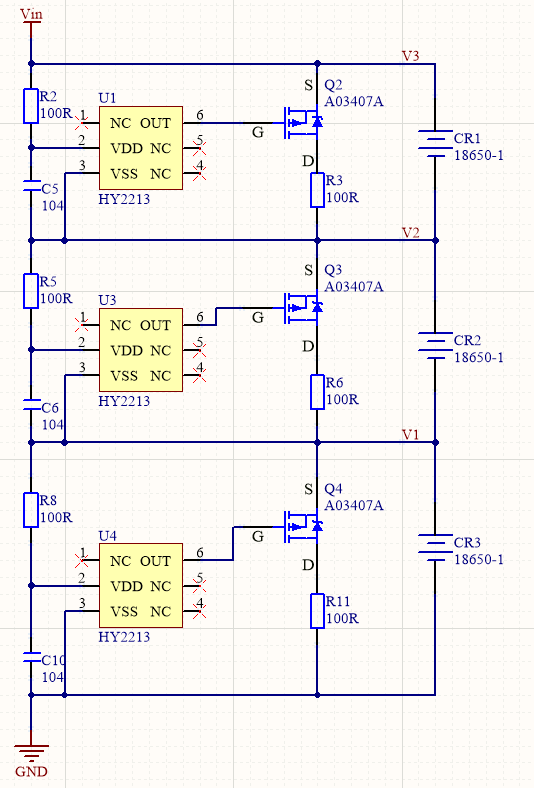
電路設計中用于均衡的電阻的阻值為100歐,根據歐姆定律在均衡過程中電阻消耗功率為0.1764W,所以在電阻選型上可選擇1206封裝貼片電阻。
-
充電電路
+關注
關注
32文章
243瀏覽量
53680 -
電路設計
+關注
關注
6678文章
2456瀏覽量
204694 -
移動機器人
+關注
關注
2文章
763瀏覽量
33585 -
均衡充電
+關注
關注
1文章
14瀏覽量
12348 -
ROS
+關注
關注
1文章
278瀏覽量
17032
發布評論請先 登錄
相關推薦
資料:移動機器人能否自動充電?
Labview My RIO 移動機器人
機器人、協作機器人和移動機器人,你分的清楚嗎
家庭移動機器人避障常用傳感器及相關技術
如何實現移動機器人的設計?
請問怎么設計一種室外移動機器人組合導航定位系統?
什么是移動機器人軟硬件系統問題
最實用的STM32和ROS機器人的串口通信方案
差速移動機器人軌跡跟蹤控制方法
如何利用掃地機輪子制作ROS移動機器人地盤
基于Matlab和VR技術的移動機器人建模及仿真
用于ROS移動機器人高集成電源解決方案(一)
DRC3000:商用移動機器人整體解決方案






 工商網監
工商網監
評論