") 大象機器人開源六軸機械臂myCobot 320全息投影
大象機器人開源六軸機械臂myCobot 320全息投影
是不是覺得這個展示會比較新穎,神奇呢?其實這是一項技術(shù),叫做全息投影。全息技術(shù)已經(jīng)成為我們生活中的一部分,它的應(yīng)用已經(jīng)涵蓋了多個領(lǐng)域。在娛樂領(lǐng)域,我們可以在電影院、游戲廳和主題公園等地方看到全息技術(shù)的應(yīng)用,通過全息投影技術(shù),觀眾可以享受到更加逼真的視覺效果,進一步提高了娛樂體驗。在醫(yī)療領(lǐng)域,全息技術(shù)被廣泛用于醫(yī)學(xué)診斷和手術(shù)中,通過呈現(xiàn)高分辨率的三維影像,醫(yī)生可以更加精準(zhǔn)地觀察病情,提高了診斷和手術(shù)的效果。在教育領(lǐng)域,全息技術(shù)被用于制作教學(xué)資料和科普展示,幫助學(xué)生更好地理解和掌握知識。此外,全息技術(shù)還被應(yīng)用于工程制造、安全監(jiān)控、虛擬現(xiàn)實等領(lǐng)域,為我們的生活帶來了更多的便利和創(chuàng)新。可以預(yù)見,隨著技術(shù)的不斷發(fā)展和應(yīng)用場景的不斷拓展,全息技術(shù)在未來的生活中會發(fā)揮更加重要的作用。
引言:
這篇文章主要內(nèi)容是描述如何用myCobot320 M5Stack 2022 和 DSee-65X全息投影設(shè)備來實現(xiàn)裸眼3D的展示。
介紹
該項目是由大象機器人和DSeeLab Hologram 共同合作而成.
DSee-65X全息設(shè)備:
DSee-65X 是一家名為DSee Lab Hologram專做全息技術(shù)的公司的產(chǎn)品
DSee-65x:高分辨率、高亮度支持各種內(nèi)容格式WiFi連接APP操作云端遠程集群控制無限拼接大屏展示3萬小時連續(xù)運轉(zhuǎn).
myCobot 320 M5Stack-Base 2022
myCobot 320 M5Stack-Base是myCobot280產(chǎn)品進階版,主要適合創(chuàng)客及科研人員,能夠根據(jù)用戶的需求進行二次開發(fā),實現(xiàn)用戶個性化定制。整體精巧構(gòu)思,all-in-one設(shè)計,具有易用性、安全性和經(jīng)濟性三大優(yōu)勢。myCobot 320本體重量3kg,負載1kg,工作半徑350mm,體積相對小巧但功能強大, 操作簡單、能與人協(xié)同、安全工作。
myCobot 320 2022 配置了豐富的接口,可以快速適配各種使用場景。
介紹完兩個設(shè)備,接下來實現(xiàn)將全息設(shè)備跟機械臂像結(jié)合共同工作。
這個項目操作起來十分的簡單,可以分為兩個步驟,
1 將DSee-65X安裝在myCobot 320 的末端
2 控制myCobot320 做一個優(yōu)美得軌跡來展示全息影像
Project
安裝
DSee-65X和myCobot320 M5Stack 2022是兩個不同公司的產(chǎn)品,拿到手的時候發(fā)現(xiàn)我們并不能直接把全息設(shè)備給安裝在myCobot320 末端,所以我們得需要對全息設(shè)備進行改造。

所以我們得需要對全息設(shè)備進行改造
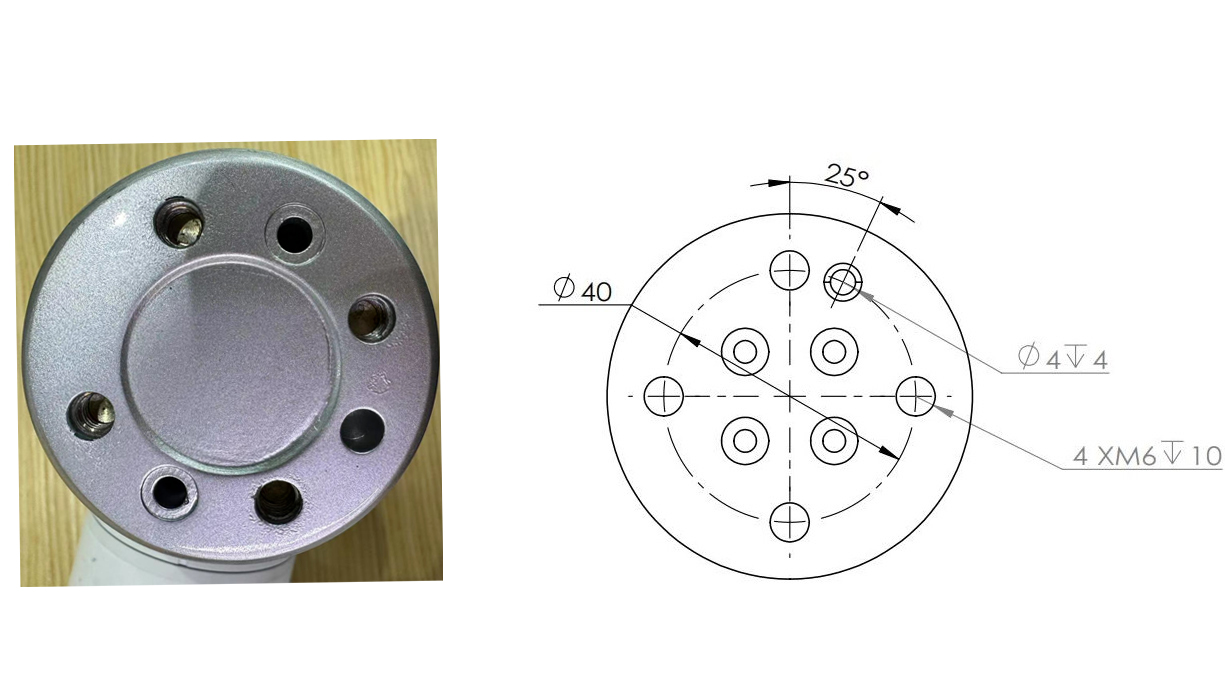
下圖是myCobot320 末端的結(jié)構(gòu)
放一個全息的gif的圖片
根據(jù)所提供的信息,我們加一塊板子作為它們的中間橋梁來適配。
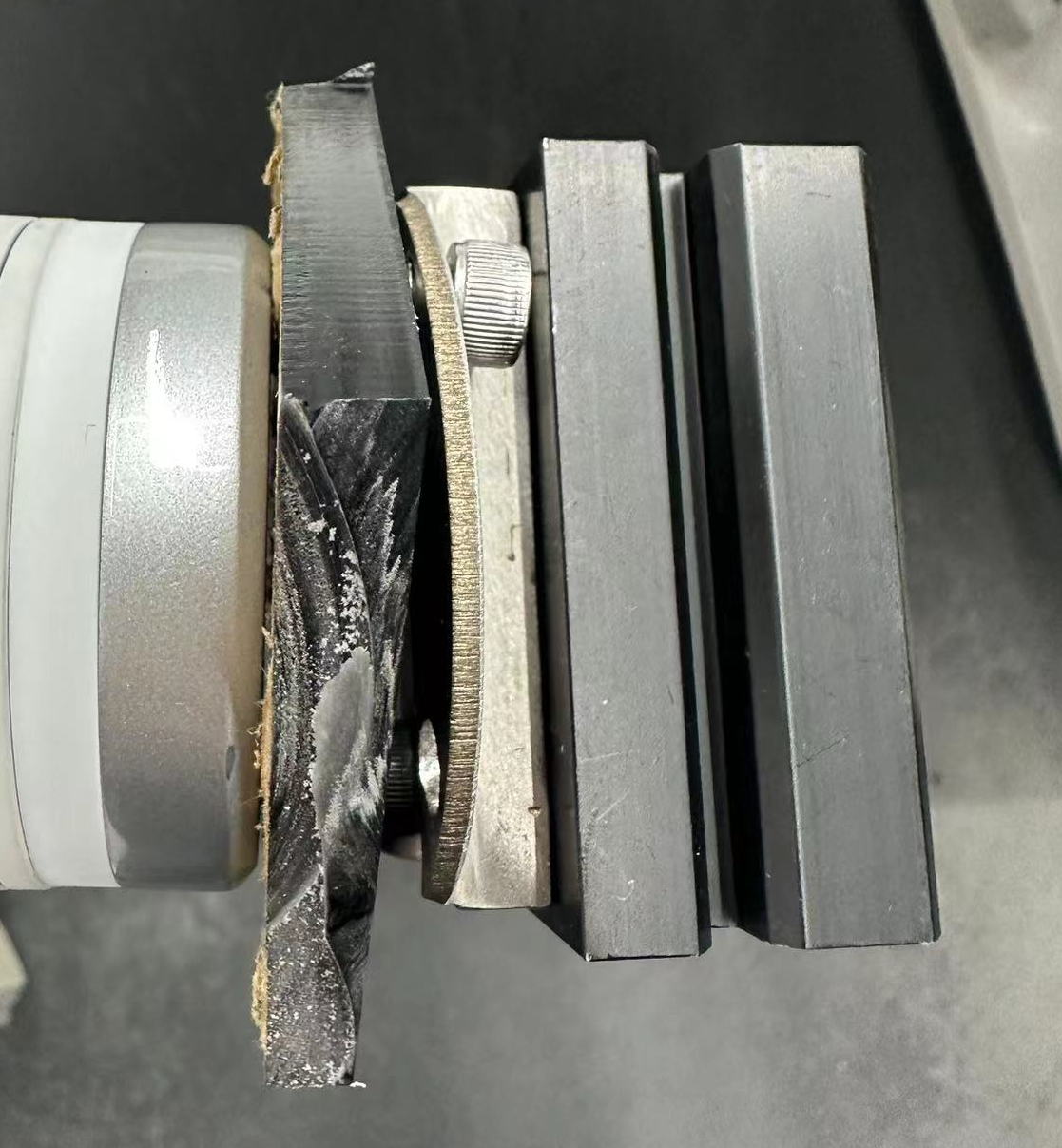
myCobot320的負載最大能夠達到1kg,這點改裝對它來說完全沒問題。
控制機械臂
我們的目標(biāo)是設(shè)計一套myCobot320機械臂運行的軌跡,這套軌跡需要保證不影響全息影響的觀看。
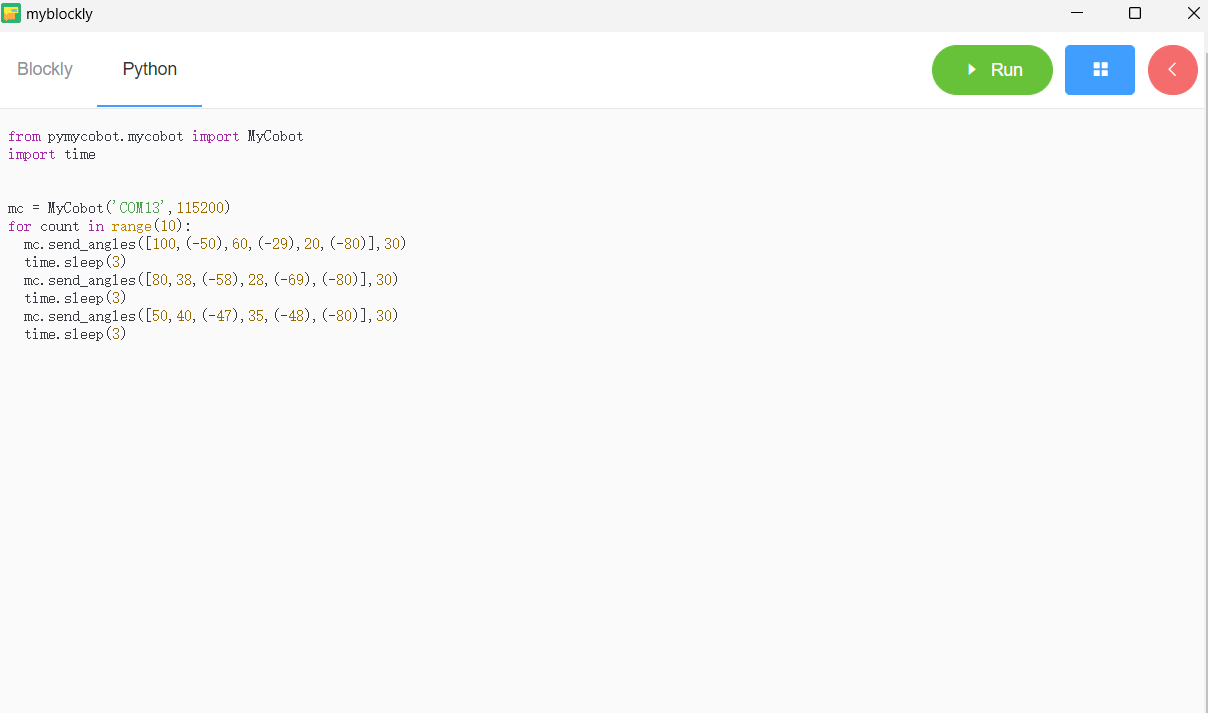
myCobot 320 的接口豐富,支持Python,C++,C#,JavaScript,Arduino,ROS等。接下來來對它進行編程。這里我們使用的是一種很容易上手的方法。這個方法是用myBlockly軟件去進行編程,myBlockly是一款圖形編程軟件,通過拖拽式的方式來進行編寫代碼。
下面圖片中的代碼是機械臂運動軌跡的圖形代碼。

myBlockly的底層代碼是python編寫的,所以我們也可以直接使用python代碼來控制機械臂,下圖是python的代碼。
介紹代碼功能
function: MyCobot('brand',port) create a object to use the pymycobot lib function: send_angles([angles],speed) Sending the angle of each joint to the robot arm to move at speed function: time.sleep(s) Delay by s seconds,then go to the next command line function: for count in range(c): Loop the following code c times
該代碼的實現(xiàn)的內(nèi)容:
每發(fā)送1個關(guān)節(jié)角度給機械臂去執(zhí)行,就需要等待3s 然后再發(fā)送下一個關(guān)節(jié)角度給機械臂。一次循環(huán)共有三次運動控制,總共循環(huán)10次。
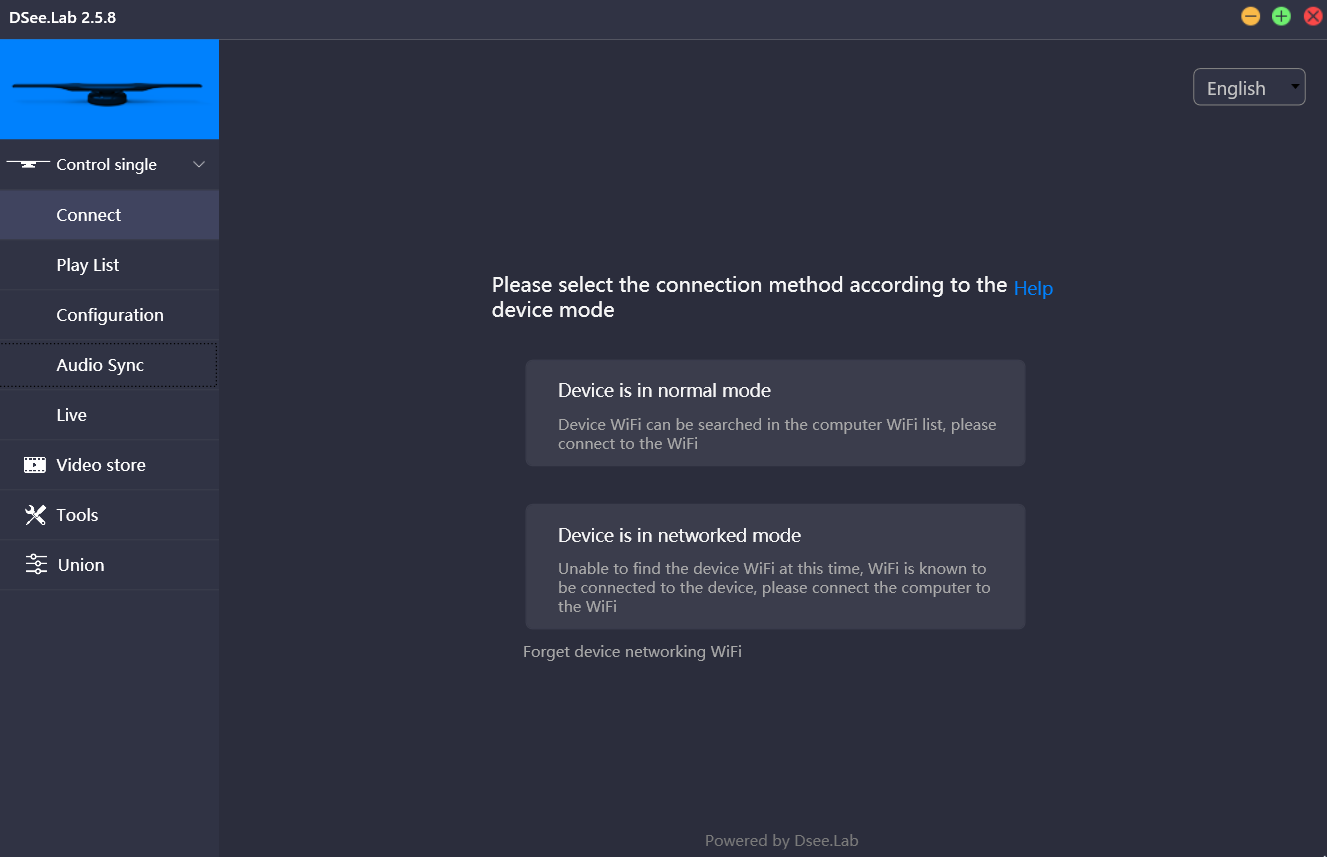
簡單說明一下DSee-65X如何使用。
每個DSee設(shè)備都有專屬的局域網(wǎng),用電腦連接上同一個局域網(wǎng)就可以讓全息設(shè)備啟動了。
總結(jié)
整個流程下來看著只是機械臂充當(dāng)一個支撐,展示著全息影像設(shè)備。我們可以想象豐富一些,通過使用全息投影技術(shù),可以將三維模型或圖像投射到空間中,然后利用傳感器或攝像頭等設(shè)備捕捉用戶的動作或手勢,實現(xiàn)對機械臂的控制。例如,在制造或物流行業(yè),可以使用機械臂和全息技術(shù)相結(jié)合,實現(xiàn)更高效的生產(chǎn)和物流操作。在醫(yī)療行業(yè),也可以利用機械臂和全息技術(shù)相結(jié)合,實現(xiàn)更加精準(zhǔn)的手術(shù)和治療。總之,機械臂和全息技術(shù)相結(jié)合可以為各種應(yīng)用場景帶來更加智能化、精準(zhǔn)化的控制和操作方式,提高生產(chǎn)效率和工作質(zhì)量。
這些都是需要喜歡創(chuàng)作的你來投入精力去開發(fā)!歡迎大家在下面留言,把你們的想法分享出來大家一起去討論創(chuàng)作更加有趣的項目。
審核編輯黃宇
-
機器人
+關(guān)注
關(guān)注
211文章
28502瀏覽量
207485 -
全息投影
+關(guān)注
關(guān)注
5文章
81瀏覽量
19558 -
機械臂
+關(guān)注
關(guān)注
12文章
515瀏覽量
24627
發(fā)布評論請先 登錄
相關(guān)推薦
開源工業(yè)機械臂開發(fā)套件
六軸工業(yè)機器人的主要特點
開源資料六足仿生機器人(原理圖+PCB+源碼等)
六軸機械臂免費使用,學(xué)習(xí)ROS、Python火熱報名中
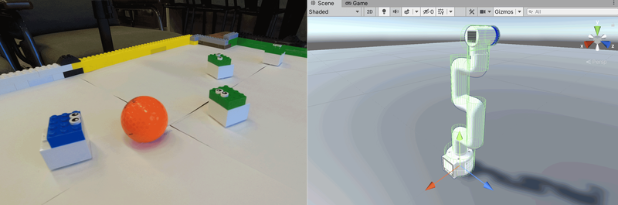
myCobot機械臂應(yīng)用于Unity機器人編程實戰(zhàn)課
MyCobot六軸機械臂開箱及開發(fā)前的準(zhǔn)備工作(一)

大象機器人推出桌面高精度機械臂ultraArm,配五大套裝,助力最燃AI視覺玩法

myCobot Pro600六軸機械臂與3D深度視覺:物體精確識別抓取堆疊

開源六軸機械臂myCobot 280末端執(zhí)行器實用案例解析

自動化革命:大象機器人的Mercury A1機械臂

大象機器人六軸協(xié)作機械臂myCobot 320 進行手勢識別!

大象機器人開源協(xié)作機械臂myCobot 630 全面升級!
大象機器人開源協(xié)作機械臂機械臂接入GPT4o大模型!

- 設(shè)計技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動
- 處理器/DSP
- EDA/IC設(shè)計
- 存儲技術(shù)
- 光電顯示
- EMC/EMI設(shè)計
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實
- 可穿戴設(shè)備
- 機器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計資源
- 設(shè)計技術(shù)
- 電子百科
- 電子視頻
- 元器件知識
- 工具箱
- VIP會員
- 最新技術(shù)文章
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會
- 活動策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測驗
- 設(shè)計大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術(shù)開發(fā)區(qū)航空路6號手機智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
評論