 ?深入理解自動控制原理
?深入理解自動控制原理
1. 控制原理
1.1 開環與閉環系統
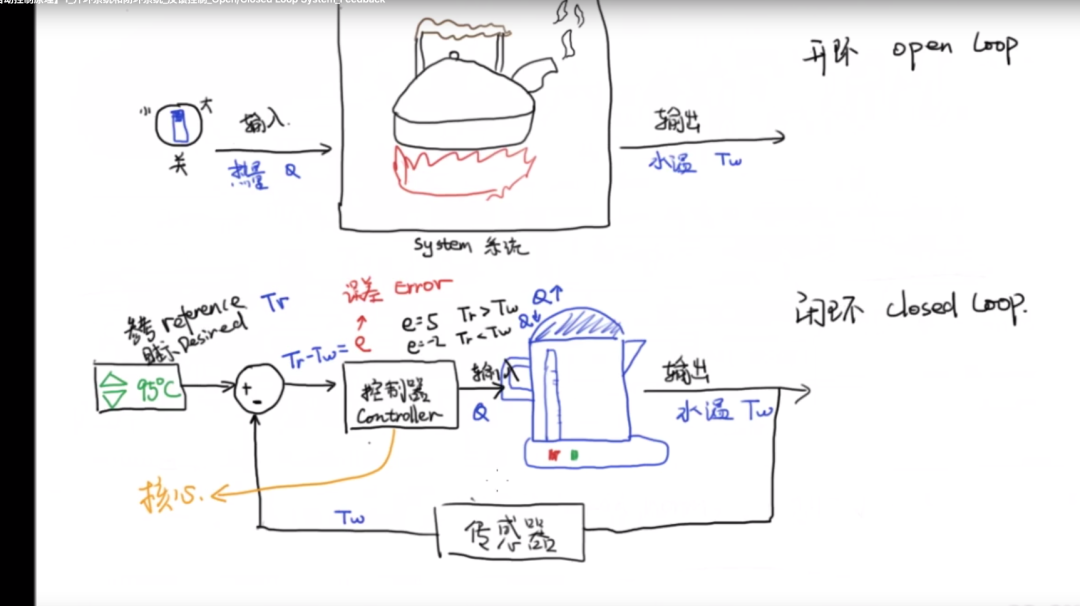
下面是開環系統與閉環系統的示例。以給水壺加熱的過程舉例,開環系統只是簡單的利用開關信號控制水壺的加熱。
而下圖的閉環控制系統中,將添加溫度傳感器所測量的信號作為系統的反饋量。設計控制系統的核心就是通過對閉環系統的控制器進行調整,利用反饋量信號,完成閉環的穩定控制。
同時,這就是反饋的過程。
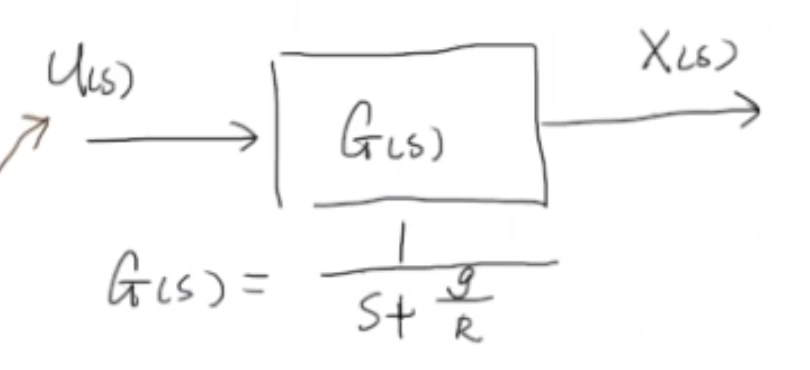
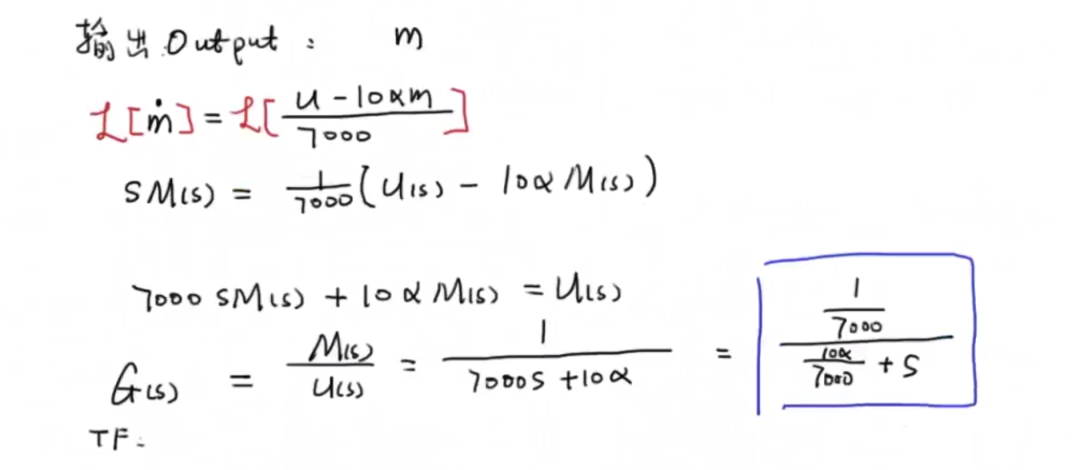
簡單的開環系統有如下描述:(這里以流體力學的公式作為舉例)
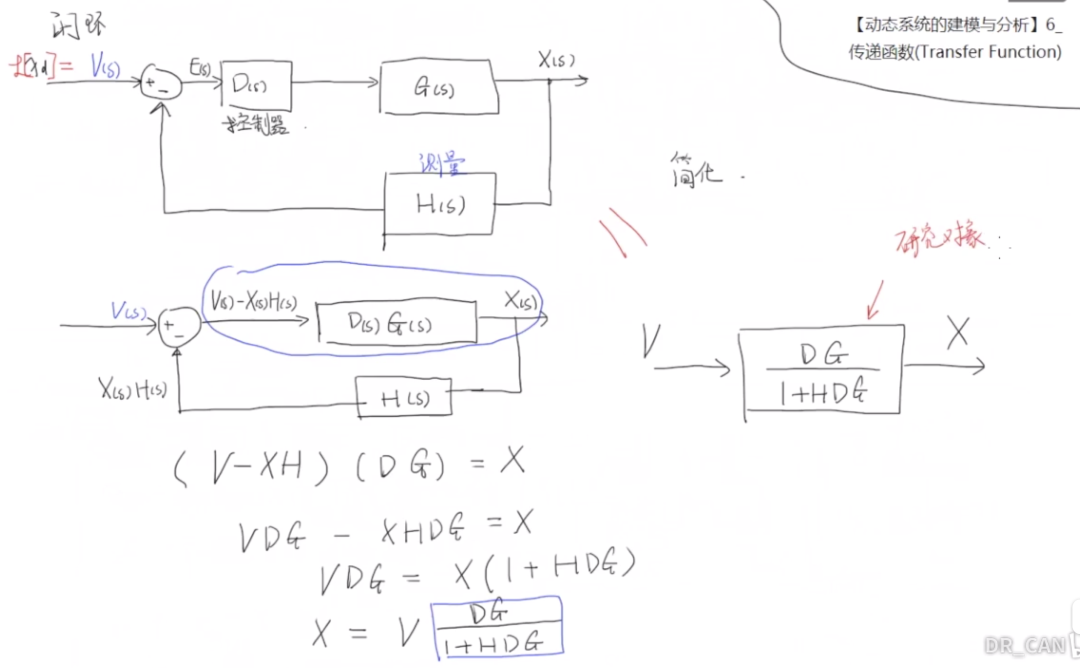
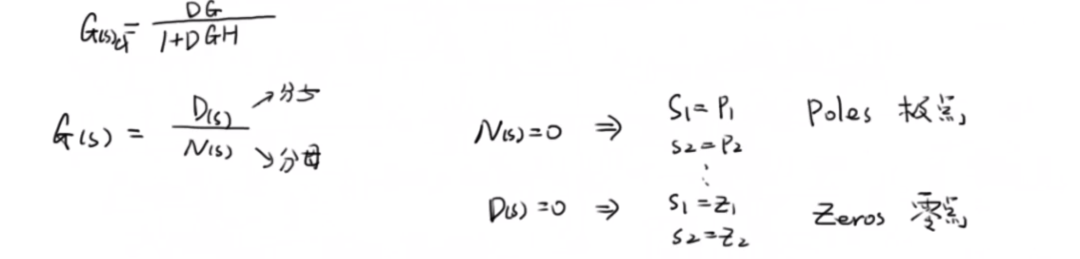
添加控制器D(s),并增加測量H(s),構成如下閉環系統。
但是在分析閉環系統的穩定性時,一般的做法是將其轉換成為開環系統,并將新構造的開環系統傳遞函數作為研究對象,分析系統的穩定性。
1.2 穩定性分析
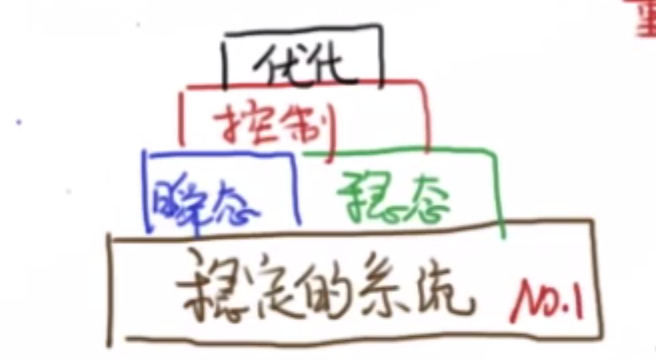
對于一個系統,如果沒有穩定性的先決條件,那么其他的(穩態誤差分析、瞬態誤差分析)將無從說起。穩定性:傳遞函數極點在復平面的左半邊。(橫坐標為極點,縱坐標為零點)
所以對于系統穩定性的討論,實際上是在分析輸入為單位沖激函數時,系統輸出的傳遞函數。最后觀察系統輸出隨時間變化的曲線是否到達穩定的位置。
零點和極點的定義如下:
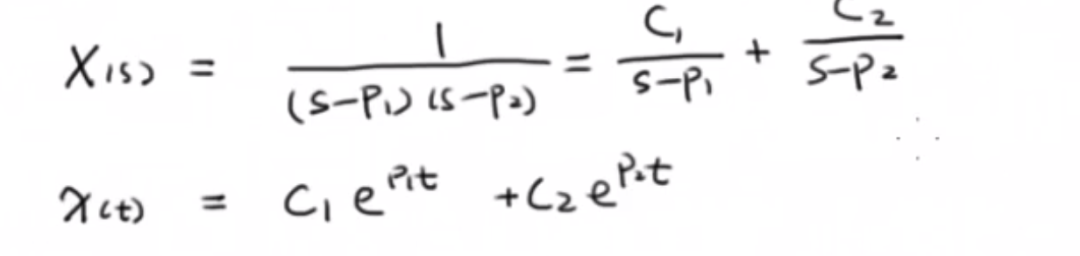
分析為什么極點為負的,系統是穩定的:
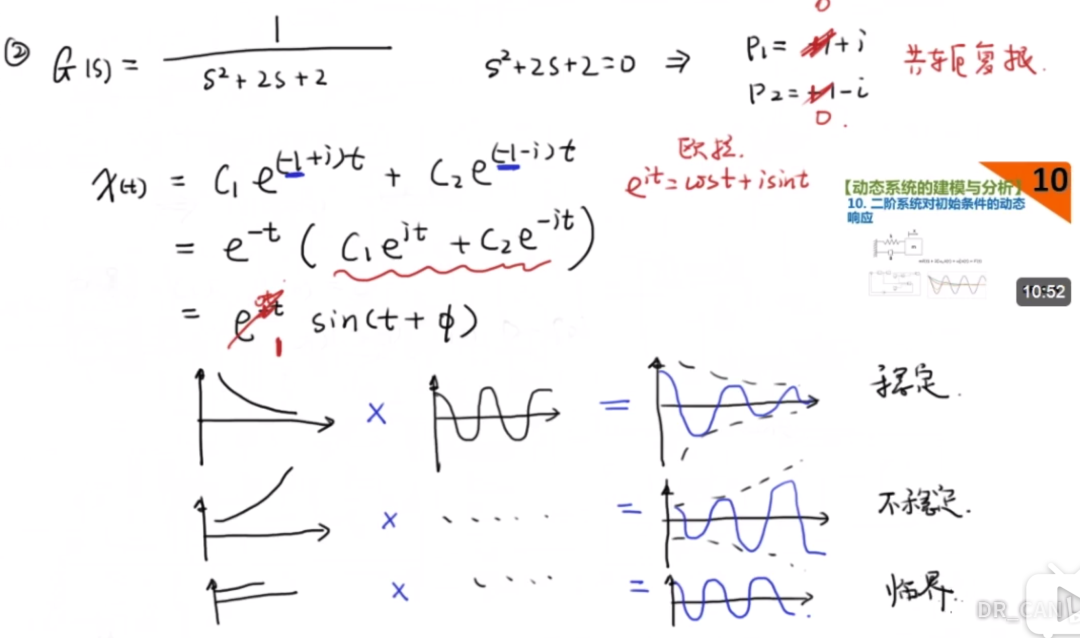
下面這個圖要更加直觀:
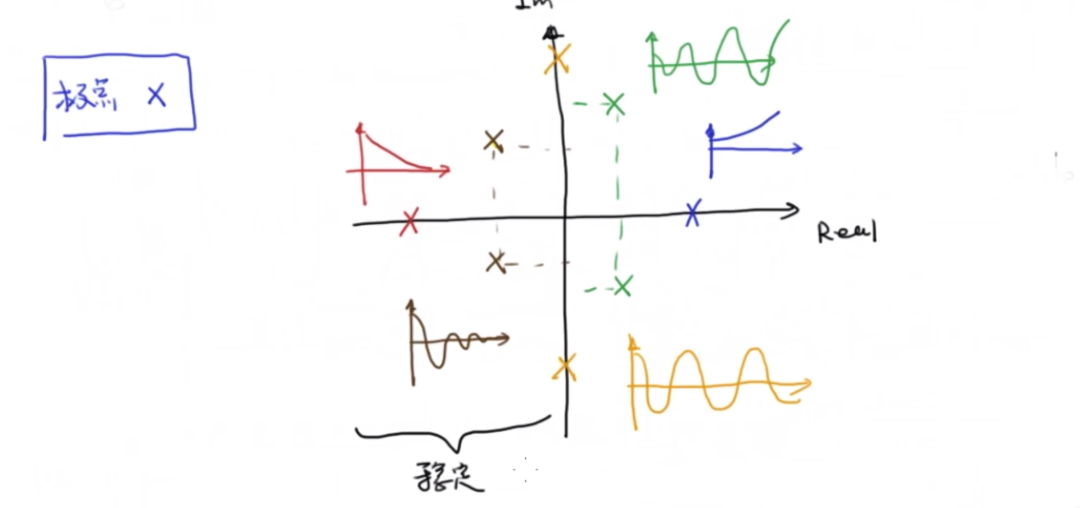
那么我們如何設計控制器?就是將最終的傳遞函數的極點在左邊平面,叫做極點配置。現代控制理論中,研究的是狀態矩陣的特征值,對應的就是傳遞函數的極點。
1.3 一起燃燒卡路里/科學減肥(系統分析實例_數學建模部分)
框圖表示如下:
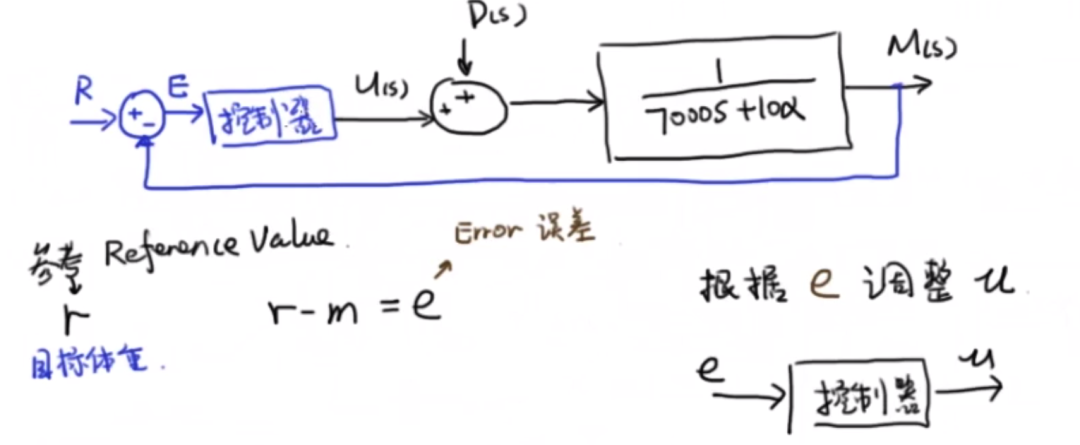
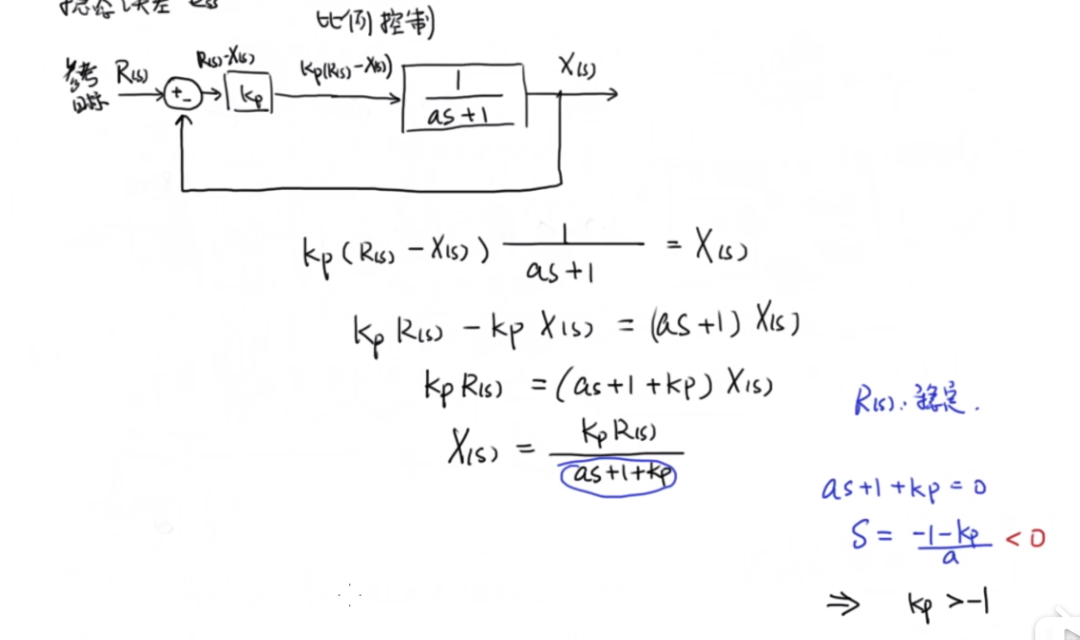
設計比例控制器(最為簡單的控制器)如下:
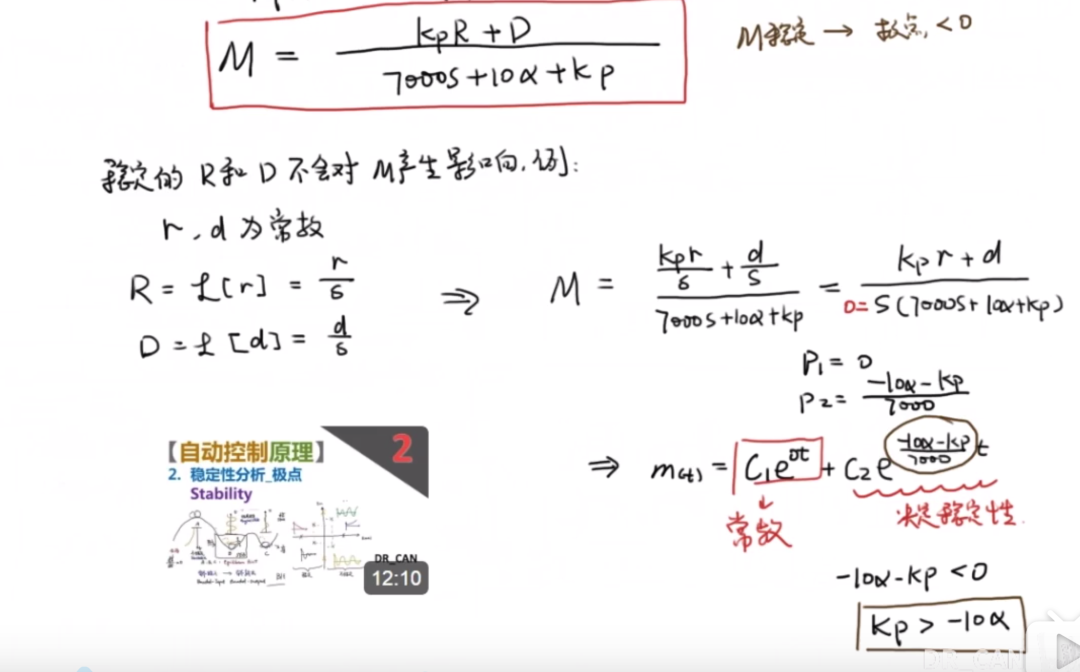
那么如何設計該控制器,讓最終的系統趨向于穩定狀態呢?(也就是說傳遞函數的極點在左半邊平面)
學習控制理論一定要從微分方程入手,弄清楚微分方程與傳遞函數之間的關系就會容易理解很多。
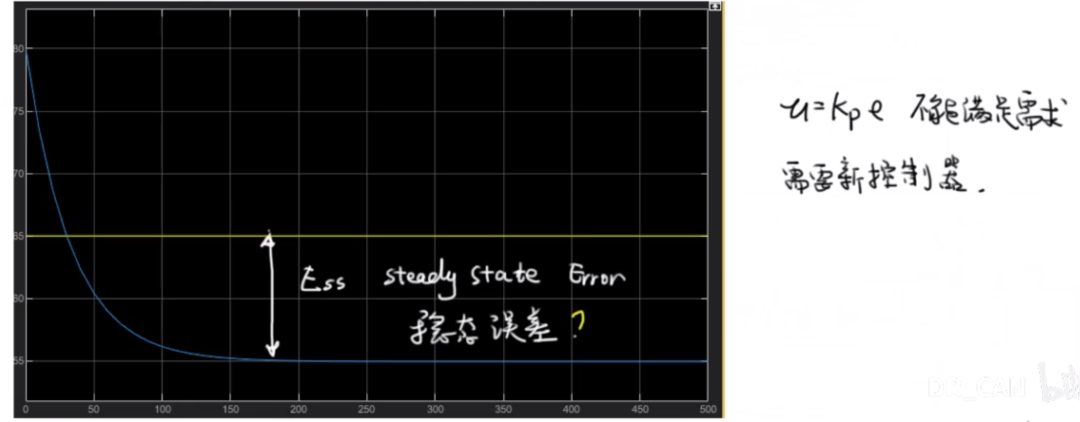
通過對于比例控制器的分析之后發現,單純的比例控制最終產生穩態誤差。
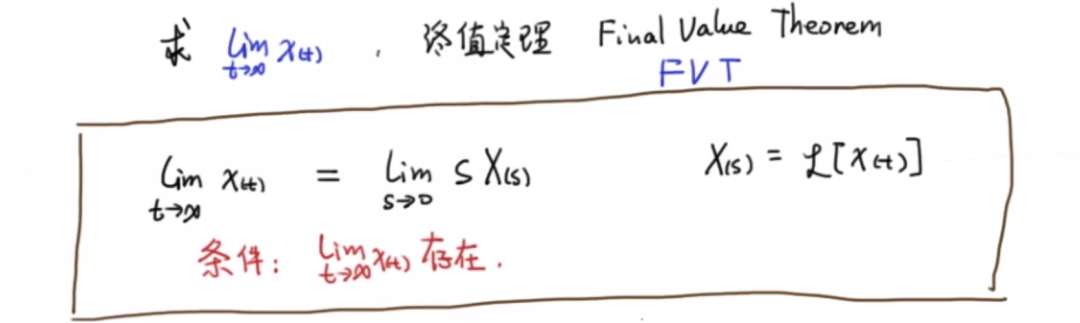
1.4 終值定理與穩態誤差
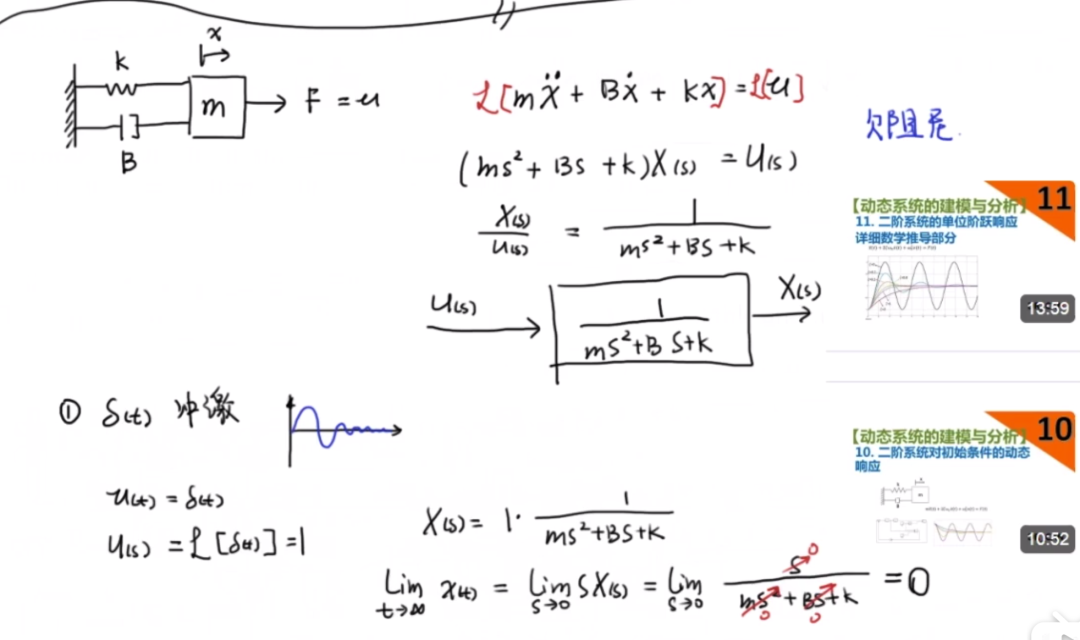
下面討論的系統是存在參考信號的系統,類似于下圖。終值定理,用來算系統輸出的極限的工具。(FVT)
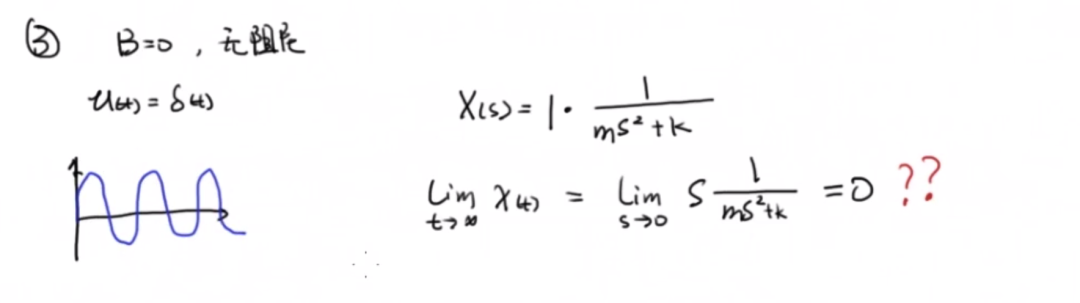
下圖解釋了彈簧阻尼系統的傳遞函數,還有在沖激響應下系統的終值定理的使用方式。
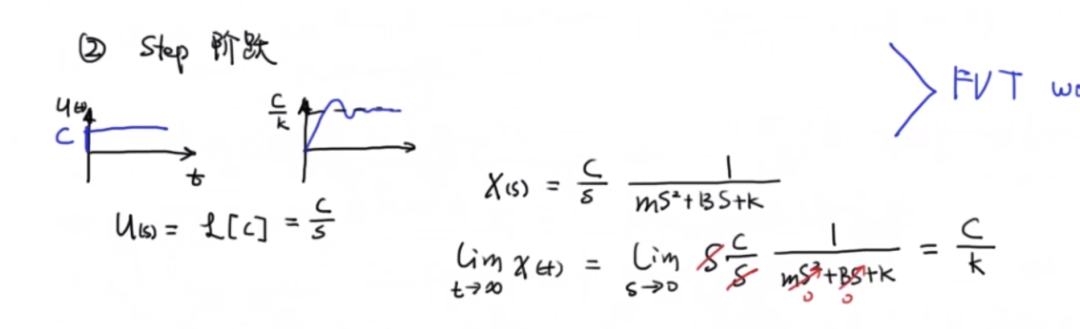
這里需要注意的是第二種情況,代表了輸入參考信號為c時(相當于r)的情況。
條件如下:
最終求出來的極限值經過運算就是系統的穩態誤差。

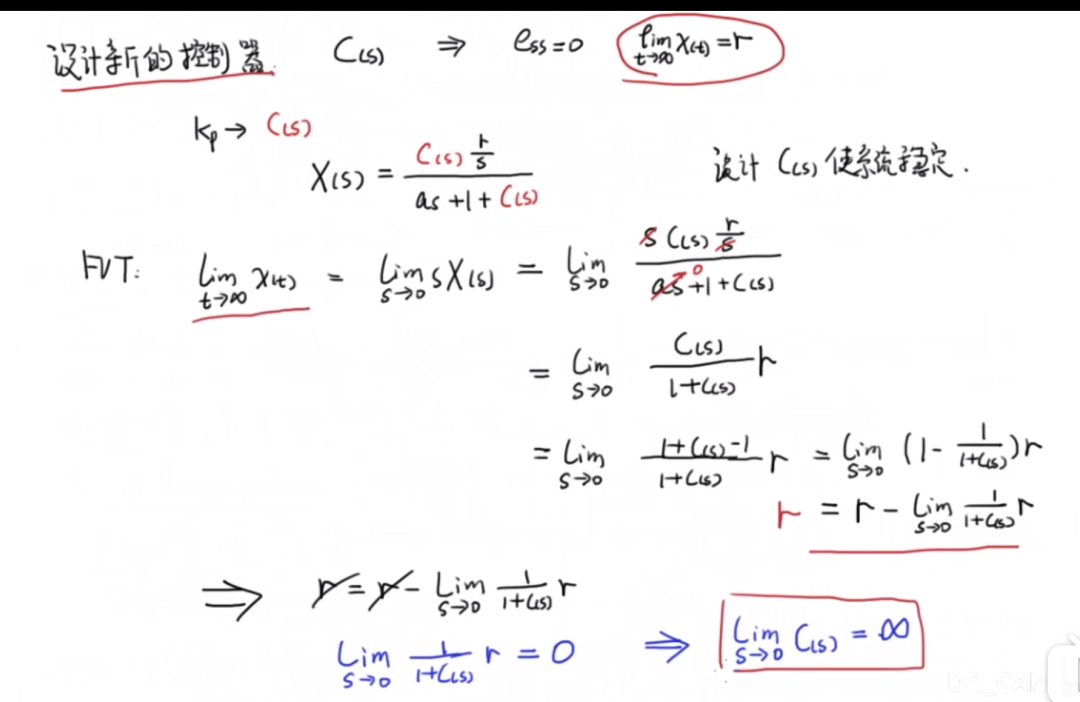
1)比例控制
舉例說明。下面是一個最為簡單的一階系統,采用的控制方式是比例控制。
利用定理分析穩態誤差如下:

這里說明了比例控制的局限性,必須采用更加實用性的控制算法。比例控制充法消除穩態誤差
2)比例積分控制
并有下面變換方式:
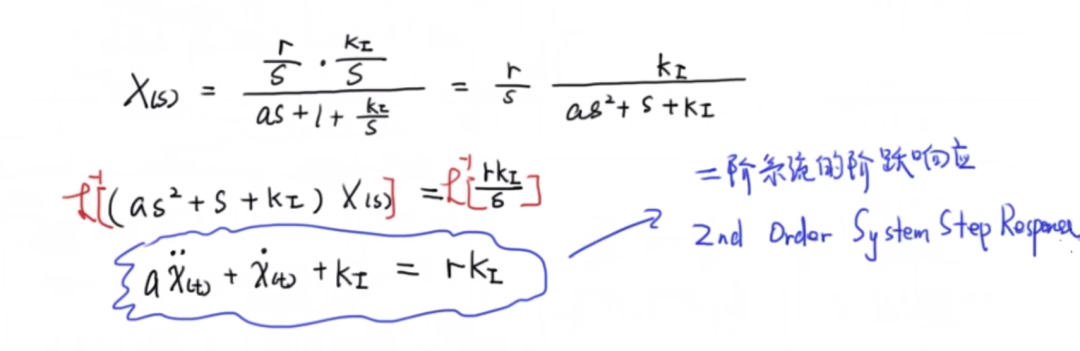
通過引入一個積分信號,讓本來的一階系統變成一個二階系統。
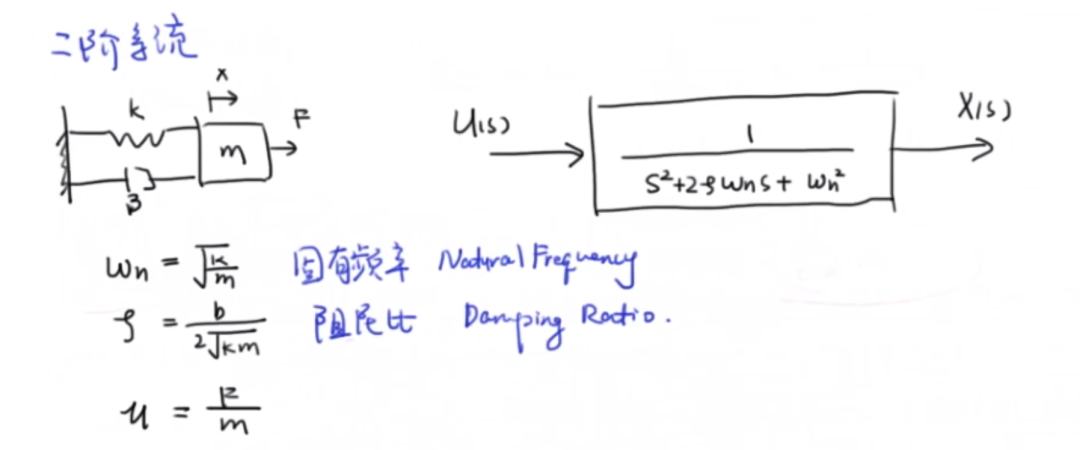
1.5 根軌跡
再回到彈簧系統,是一個二階系統。
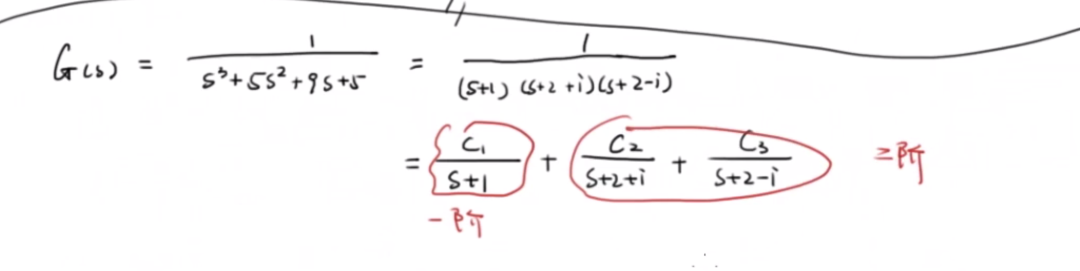
對于高階系統不過也是幾個一階系統的疊加,如下:
這一節評估了根的位置對于控制器的影響。

1.6 PID控制
比例控制
微分控制:調節水溫變化的速度,
積分控制:誤差的累計量
注意:
比例積分控制沒有單獨的比例控制收斂快
微分控制解決了超調量問題
微分控制的問題是初始狀態下的輸入值很大
同時,微分控制的控制量受到測量誤差的影響非常大。他對噪聲非常敏感
2. 數學工具
2.1 拉普拉斯逆變換
2.2 矩陣的性質
矩陣有下面的性質,現代控制理論的分析中常常會用到。

2.3 bode圖
給信號濾波的過程中,需要注意幅頻響應。如果在帶通范圍內不是1的話,就會改變信號的幅值,就會改變最終加速度輸出的信號。
另外,上面的圖就是bode圖,但是是基于離散系統的。
如何去理解bode圖?
bode圖是針對于傳遞函數而言的,用在連續系統上。(因為控制系統常常用傳遞函數來表示。)
%% 這個是正解b = [1,2,3];a = [2,1,3];figure;bode(b,a)% [h1 , ftp] = freqs(b,a);mag = 20*log10(abs(h1)); % get magnitude of spectrum in dBphase = angle(h1)/pi*180; % get phase in deg.figuresemilogx(ftp,mag)xlabel('Frequency (Hz)'),ylabel('Magnitude (dB)')
(這樣描述是和真實系統不一致的,具體參考濾波器性質)
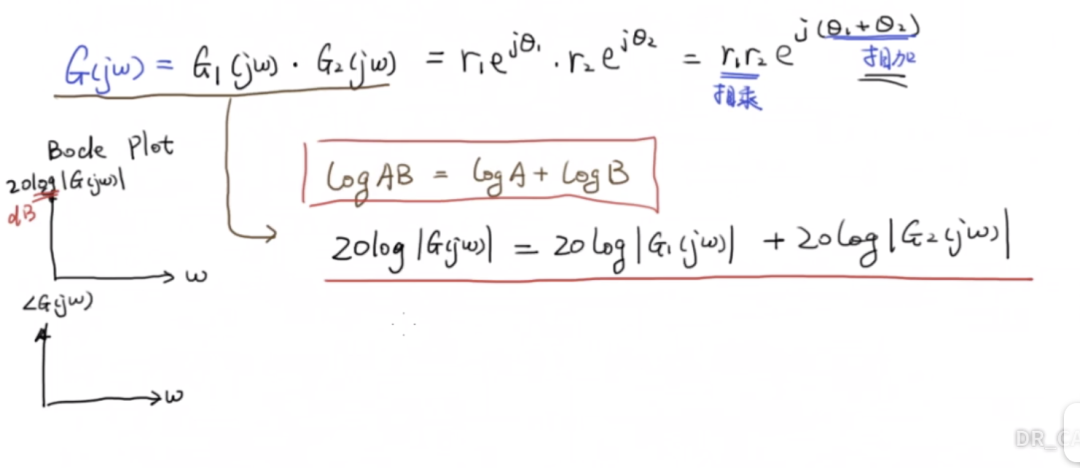
總結來說有以下幾點:
振幅的比較用10log10就行,但是能量的比較需要20log10

振幅與功率/能量之間的關系如下:

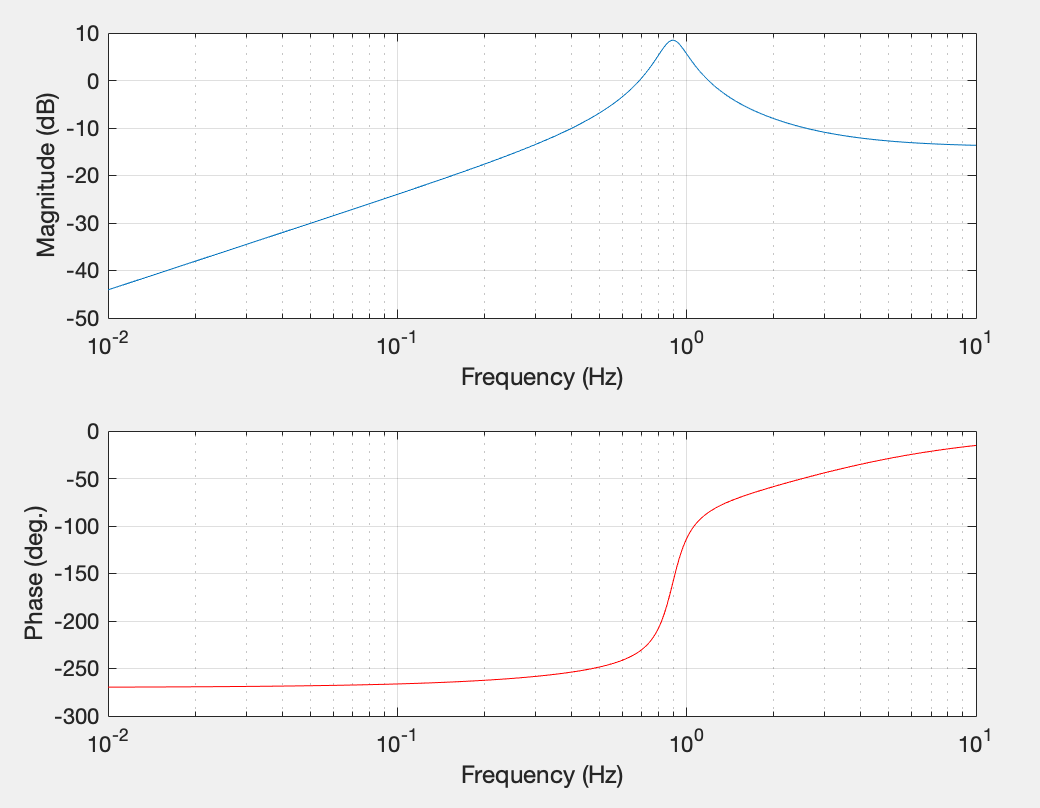
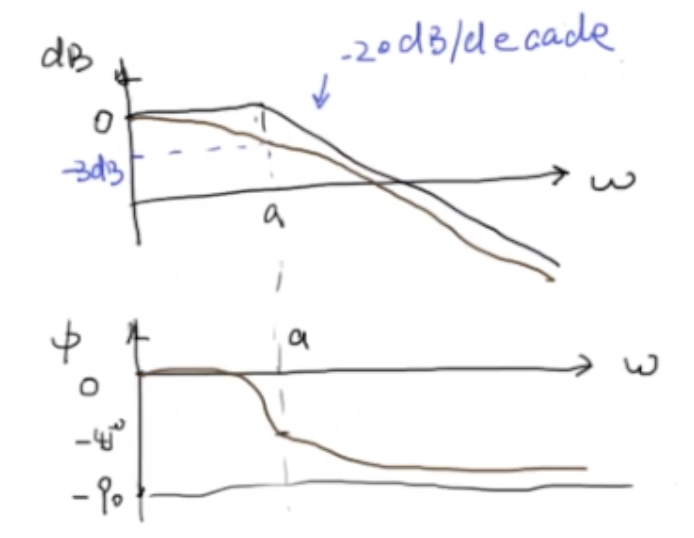
從一個實例出發理解bode圖
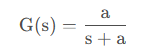
對于系統傳遞函數:
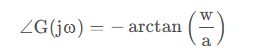
分析頻率響應:
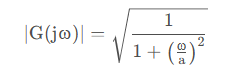
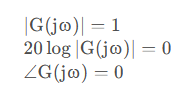
低頻:w<
截止頻率:w=a
這個-3dB很重要,表達的是輸出的振幅是輸入的振幅的sqrt(1/2),能量是一半的關系。


高頻:w>>a

bode圖如下:
bode圖的作用是什么?
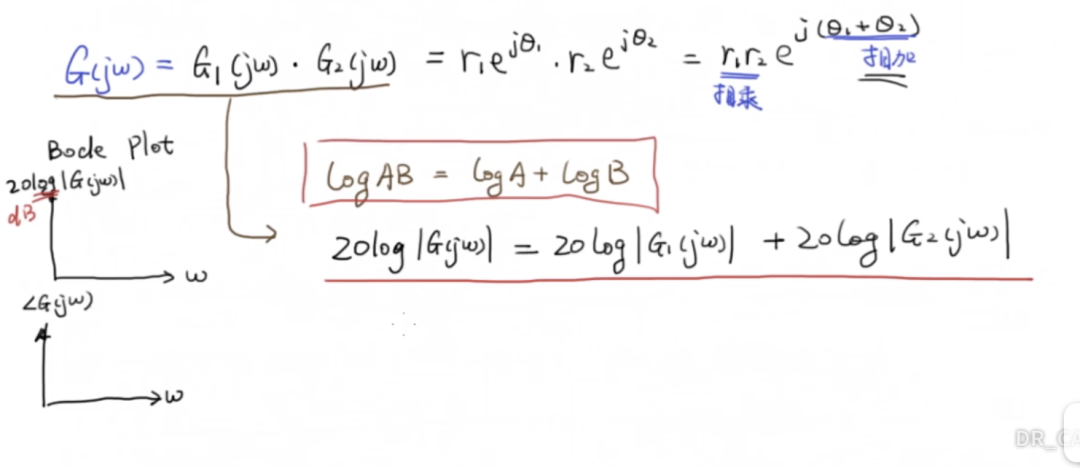
實際上,我們可以將級聯系統的子系統bode圖進行累加,那么我們就得到了新的級聯系統的真正的bode圖了。原理如上。
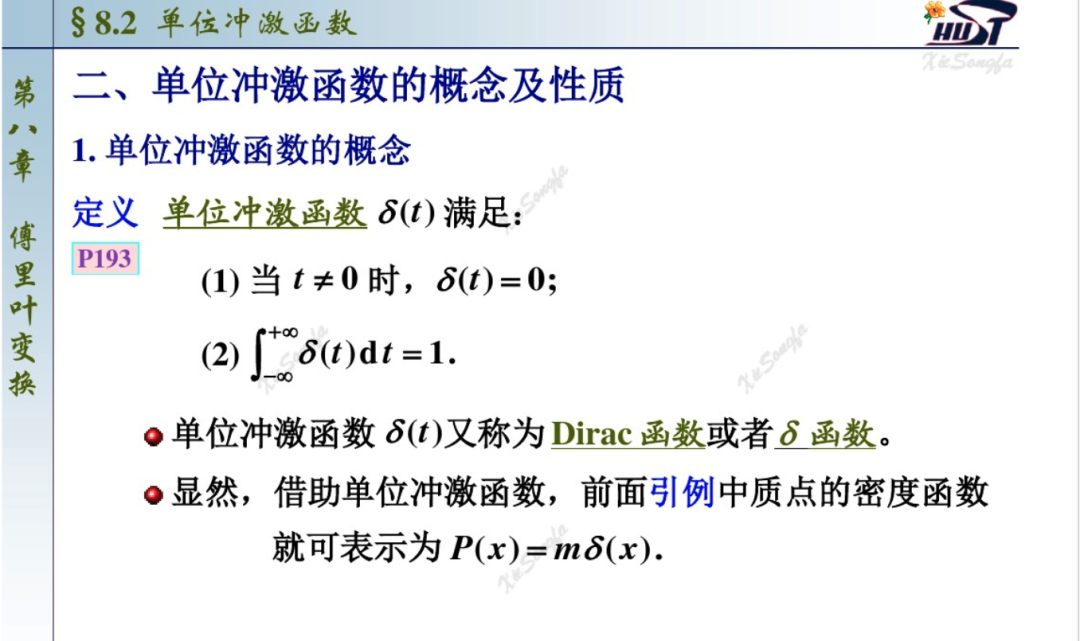
2.4 單位沖激函數
三. 現代控制原理串講
1. 現代控制理論概要
首先要了解一個簡單的彈簧阻尼模型,作為控制的對象,其滿足胡克定律。
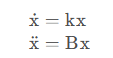
描述現代控制理論中的系統,最基礎的當然是狀態空間表示法:
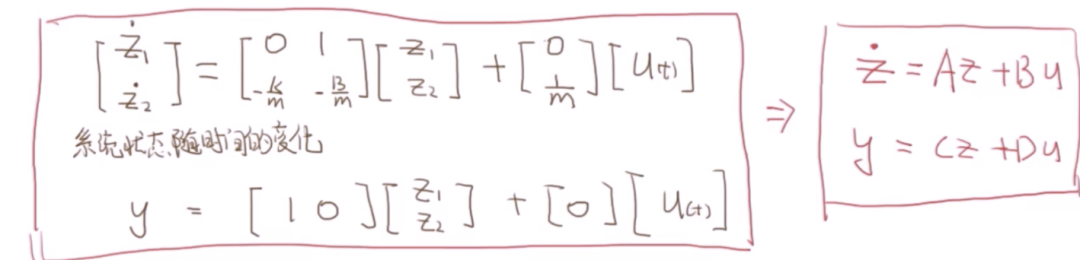
當然,通過拉普拉斯變換可以轉換成下面的形式,控制對象是彈簧阻尼塊。

其中有一條重要的信息,實際上矩陣A的特征值就是G(s)的極點,決定了系統的穩定性。上面的右式時通用的。
去分析一個系統,主要需要考慮以下幾個重要的性質。
(那么對于自動控制,只需要極點就夠了)
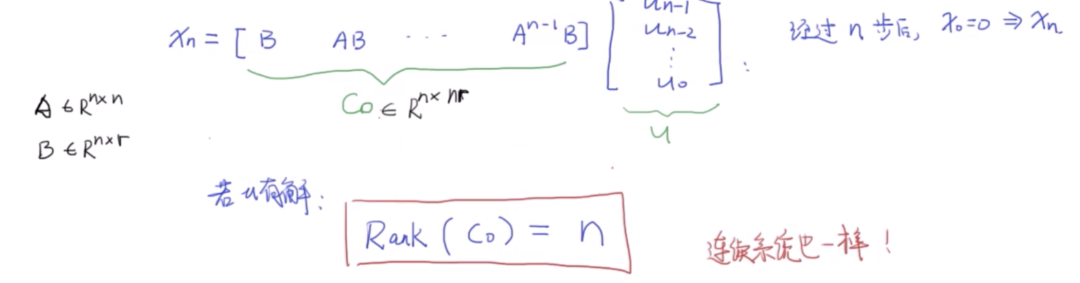
可控性
李雅普諾夫穩定性:確定系統的穩定狀態,控制系統可以滿足數學的條件。在一階系統中,常常用極點分析的方法去觀察穩定性。現代控制理論中常用到的分析系統的方法就是去找系統的V函數,得到最后是不是能夠
可觀性:狀態觀測器。系統狀態加入不可直接測量,那么就需要通過輸出和控制量去估計狀態。狀態觀測器需要達到一個收斂的狀態。建立觀測器時,實際上是建立一個反饋系統,使得誤差等于0。(這里是不是有誤差狀態量的部分?)
對于可觀測性,需要問一個問題:是不是所有系統都是可測的?借鑒可控性的推導,有下面的結論:

2. 怎樣去分析一個狀態空間方程系統呢?
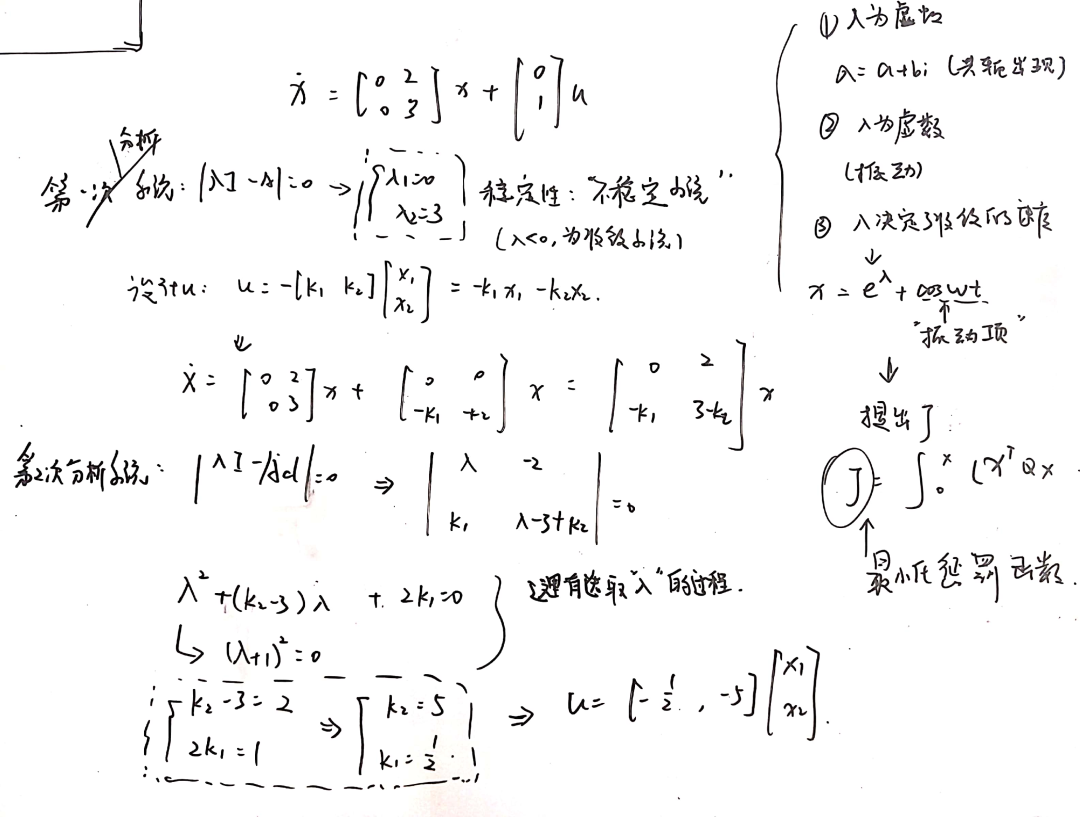
實際上看到設計控制器就是去配置特征值的過程。這里的特征值有點像自動控制原理中的極點的概念,決定了系統隨時間是收斂的,還是振動的,還是逼近于無窮的。
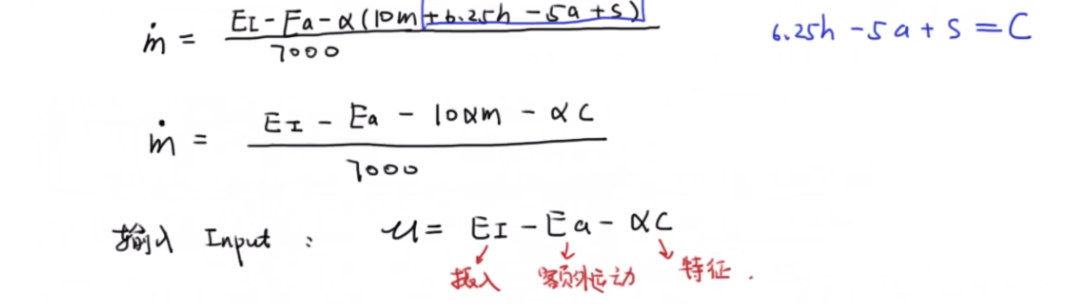
下面是對于一個控制系統的分析過程,利用配置特征值的方法可以確定比例控制的控制系數u與狀態量x之間的關系。
四. 最后的一些思考
軌跡跟蹤與制導之間的關系
軌跡跟蹤的目標是使狀態和參考狀態的誤差保持在0附近。舉例,對深空飛行器而言,按照軌跡優化+軌跡跟蹤這兩個步驟實現控制。
參考軌跡是人為設計的,可以是全局最優的,也可以是次優的。然后把跟蹤誤差保持在0附近,這也有一套控制律,比如LQR軌跡跟蹤器。
狀態控制按照給定的控制律,在航天器軌跡控制中叫做制導;在姿態控制中好像沒見過先設計好姿態運動規律的,都是即時控制。
制導律必須全局漸進穩定,適用于高動態的環境,比如空空導彈采用比例導引法。
-
控制系統
+關注
關注
41文章
6639瀏覽量
110694 -
閉環控制
+關注
關注
0文章
94瀏覽量
15616 -
開關信號
+關注
關注
0文章
23瀏覽量
13856 -
控制原理
+關注
關注
0文章
10瀏覽量
7073 -
反饋
+關注
關注
3文章
43瀏覽量
4889
原文標題:?自動控制原理(深入理解自動控制框架)
文章出處:【微信號:機器視覺沙龍,微信公眾號:機器視覺沙龍】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論