 使用DS1814微控制器控制微處理器復位
使用DS1814微控制器控制微處理器復位
以下應用筆記給出了使用DS1814微型監視器的簡單電路。電路包括與 8051 微處理器接口、與 PIC 微控制器接口以及使用 LED 指示復位。
DS1814微型監視器簡介
DS1814微型監視器具有Vcc電平監測、手動復位按鈕和內部看門狗定時器。DS1814具有三種不同的引腳排列,適用于大多數需要微處理器監視的電路,并且具有與其尺寸相當的功能。DS1814采用SOT-23-5和倒裝芯片封裝。
DS1814具有5%和10%的電壓監視容差。此容差水平用于確定微型監視器何時激活并釋放上電和斷電時的復位條件。當Vcc低于設定的容差水平時,DS1814啟動復位條件,讓微處理器有足夠的時間妥善處理其外圍設備并自行關斷。當Vcc上升到電源跳變點以上時,微監視器將微處理器置于復位狀態至少140ms,以便在微處理器嘗試與微處理器通信之前為微處理器的外圍設備提供足夠的啟動時間。此容差級別還決定了微監視器何時認為可以安全地釋放微處理器的復位。上電時,上電復位處于活動狀態,防止微處理器激活。一旦Vcc達到微監視器設置的容差水平,復位條件將保持活動狀態至少140ms。這保證了處理器僅在外圍設備完成通電后才會嘗試與其外圍設備通信。一旦上電復位時間到期,并且電壓仍處于或高于電壓容差水平,微型監視器將釋放復位條件并允許微處理器運行。
微監視器控制微處理器何時復位的另一種方式是通過手動復位按鈕輸入。DS1814A和DS1814C具有專用于內部去抖動按鈕復位的引腳。由于輸入在內部進行去抖動,因此無需任何外部電路對按鈕復位信號進行去抖動。當微型監視器未處于復位狀態時,它會監控按鈕復位引腳上的電壓,以查看其是否降至 0.3Vcc 以下。如果發生這種情況,微處理器會將微處理器置于復位狀態。此復位狀態將一直保持,直到按鈕復位引腳達到 0.8Vcc 以上。復位將保持活動狀態至少 140 毫秒,通常為 200 毫秒,之后復位將被釋放并允許微處理器運行。
DS1814還可以通過監視內部看門狗定時器來控制微處理器的激活。監控選通輸入從高電平到低電平的轉換。這種低頻閃必須每1.12秒發生一次。最好每1.12s對看門狗引腳進行一次以上的脈沖,以驗證看門狗定時器是否復位,這樣DS1814就不會錯誤地復位微處理器。如果在頻閃輸入引腳上檢測到轉換,則微型監視器中的看門狗定時器將復位并再次開始計數。如果微型監視器在超時周期內未檢測到選通輸入引腳上的電壓轉換,則復位將激活至少140ms。一旦超過這段時間,DS1814將釋放復位條件。DS1814的看門狗定時器通過為微處理器的內部看門狗定時器提供冗余來執行重要功能。如果微處理器的內部看門狗定時器被禁用,DS1814仍將在其選通輸入引腳上尋找轉換。可以使用微處理器信號(如8051上的ALE)對DS1814的看門狗輸入進行選通。此選項的缺點是,即使代碼進入雜草叢中,ALE 仍可能切換,這違背了使用它來頻閃看門狗輸入的目的。監視微處理器穩定性的首選方法是切換連接到微監視器的頻閃輸入引腳的端口引腳。雖然這種方法確實需要端口引腳,但它是更新微型監視器看門狗定時器的最可靠方法。如果不需要看門狗定時器,請將信號浮動到選通輸入以禁用它。
DS1814示例電路
本節將展示一些電路示例,以便更好地理解DS1814的應用。DS1814具有三個引腳排列選項。應用中使用的微處理器決定了應使用哪種引腳。既然已經解釋了DS1814的基本功能,那么現在來看看一些簡單的電路示例,以了解如何使用微型監視器。首先考慮微處理器具有的復位類型,高電平有效或低電平有效復位。如果微處理器具有低電平有效復位,可以選擇任何DS1814微型監視器。如果微處理器需要高電平有效復位,應使用DS1814B或C。如果需要手動復位,應選擇DS1814A或C。最后,如果設計需要看門狗,DS1814A或B都有內部看門狗定時器。DS1814的三種引腳排列選項之一應能為任何電路設計提供適當的功能。
| 裝置 | /RST有效 | RST | /PBRST有效 | /ST有效 |
| DS1814A | X | X | X | |
| DS1814B | X | X | X | |
| DS1814C | X | X | X |
圖1所示電路顯示了如何將DS1814A連接至低電平有效微處理器。之所以選擇PIC16F84A,是因為它具有低電平有效復位引腳,并具有用于切換DS1814A選通輸入引腳的端口引腳。在圖1電路中,DS1814A的/RST直接連接到PIC的/MCLR引腳。主清除(復位)(低電平MCLR)引腳的電壓電平確定微處理器是否處于復位狀態。PIC的應用軟件負責每1.12秒切換一次頻閃引腳。只要PIC每1.12秒轉換一次該引腳上的電壓,微型監視器的內部看門狗定時器就不會超時。如果看門狗定時器超時,DS1A的引腳1814將被拉低,PIC處于復位狀態140ms。該電路的一個選項是添加一個按鈕來手動復位PIC。這是通過在DS3A引腳1814和GND之間連接一個常開按鈕或開關來實現的。無需去抖動電路。如果DS3A的引腳1814保持低電平500ns,則微監視器知道手動復位已被激活,并進入復位狀態至少140ms。另一個好主意是在DS1814和微處理器的電壓源引腳上增加去耦電容。這有助于防止由于Vcc中的大瞬時降降而導致的電壓尖峰。此外,將去耦電容放置在盡可能靠近器件的位置,并保持PCB走線較短,可降低電壓尖峰。
圖1.DS1814A的應用連接到PIC微處理器。
DS1814B具有靈活性,可同時使用高電平有效和低電平有效復位,但代價是手動復位按鈕選項。DS1814B還能夠監測微處理器發送的看門狗信號。圖2所示為DS1814B如何連接到PIC微處理器的示例。
圖2.DS1814B與PIC微處理器連接的應用
注意,DS1814的低電平有效復位直接連接到PIC的主清除引腳。此外,PIC的一個I/O引腳用于轉換DS1814B的選通輸入引腳上的電壓。通常,如果電路設計中不需要手動復位,或者另一個需要高電平有效復位的微處理器,則引腳3將保持開路。但是,如圖2所示,通過220Ω電阻接地的LED用于指示DS1814B何時處于復位狀態。這種添加的電路只是一個選項,但當設備處于重置狀態時,有一個視覺提示很有用。
另一種選擇是使用DS1814B監視具有高電平有效復位的微處理器,如8051(參見圖3)。
圖3.DS1814B與8051微處理器連接的應用
DS1814B的高電平有效復位直接連接到8051的復位引腳,微處理器的一個端口引腳連接到微型監視器的選通輸入引腳。這里的區別在于,低電平有效復位(否則會斷開)通過一個470Ω電阻和一個LED連接到Vcc。這用于指示設備何時處于重置狀態。
最后兩個電路使用DS1814C(參見圖4和圖5)。該器件具有高電平有效復位、低電平有效復位和手動復位。當將使用微處理器的內部看門狗或根本不使用看門狗時,此微型監視器將很有用。第一個電路顯示如何連接到具有低電平有效復位的微處理器,第二個電路顯示如何連接到具有高電平有效復位的微處理器。
圖4.DS1814C與PIC微處理器連接的應用
圖5.DS1814C與8051微處理器連接的應用
上述兩個電路都與前面介紹的電路相似,只是沒有看門狗定時器選項。相反,內部去抖動按鈕用于控制復位。還顯示了可選的 LED 復位指示燈。
結論
所示的所有電路都易于實現。即使DS1814的復位引腳僅連接到微處理器,微監測器也能安全地控制微處理器及其外圍設備的上電和關斷。DS1814在保持微處理器電路穩定方面非常有用。
審核編輯:郭婷
-
芯片
+關注
關注
456文章
50965瀏覽量
424829 -
微處理器
+關注
關注
11文章
2271瀏覽量
82569 -
定時器
+關注
關注
23文章
3251瀏覽量
115021
發布評論請先 登錄
相關推薦
淺談微處理器和微控制器
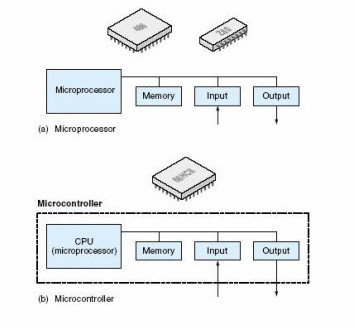
單片機、微控制器和微處理器有何區別?
微控制器(MCU)與微處理器(MPU)
使用DS1814 MicroMonitor來控制微處理器重置
使用DS1814 MicroMonitor來控制微處理器重置
單片微控制器、微處理器簡介
微處理器和微控制器的聯系和區別
"微控制器,微處理器_微控制器與微處理器"






 工商網監
工商網監
評論