 如何從外部優化降壓穩壓器ICS的頻率響應
如何從外部優化降壓穩壓器ICS的頻率響應
本應用筆記描述了外部補償的工作原理,并提供了利用上述器件實現補償的方法。通過外部補償,通過添加帶有反饋電路的簡單RC網絡,調整降壓開關穩壓器的頻率響應,以增加或減少系統的帶寬。
介紹
ADI公司的大多數開關穩壓器允許用戶調整內部控制環路。這通常是通過改變PGM(編程)組件從有限的可能配置中選擇替代配置來實現的。但是,如果用戶需要更大的靈活性,則實施外部補償。本應用筆記提供了降壓開關穩壓器外部補償的指南,這些穩壓器使用CMC來優化其頻率響應,即增加或減少系統帶寬。
理論概述
為什么需要控制回路調整?
為什么需要調整控制回路有幾個原因。主要是需要進行調整來解決不穩定的循環。不穩定的環路會降低設備的性能。這可能包括輸出電壓的不合理振蕩或開關波形的過度抖動。
或者,用戶可能需要調整控制環路以增加器件的帶寬,從而提高瞬態性能。如果用戶希望降低輸出電容以減少BOM,但仍保持穩定的環路,則可能需要進行調整。
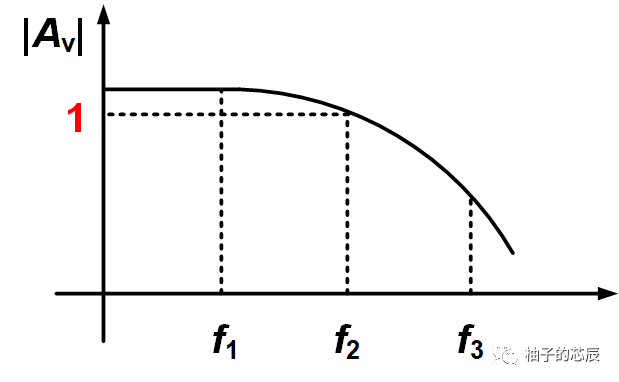
圖1顯示了使用CMC的典型降壓轉換器的近似增益幅度響應。
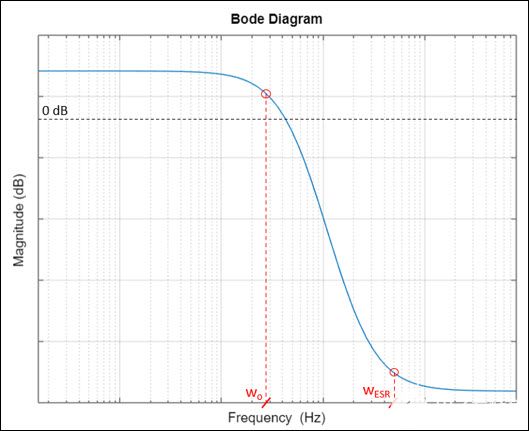
圖1.典型降壓轉換器增益幅度響應(CMC)。
如圖1所示,典型的CMC降壓轉換器頻率響應包括一個固有極點和ωO和 ω紅沉降率分別。極點ωO是“輸出負載極點”。其位置與施加的負載電流成正比。而零 ω紅沉降率由輸出電容器的等效串聯電阻 (ESR) 產生。通常,該零點要么被器件內部補償中的極點抵消,要么被推到足夠高的頻率,使其影響可以忽略不計。
通常,CMC系統使用II類補償(PI)進行內部補償,這改善了穩態誤差,并提供了交越頻率的靈活性。 圖2顯示了具有II型補償(近交越)的典型CMC的幅度響應。
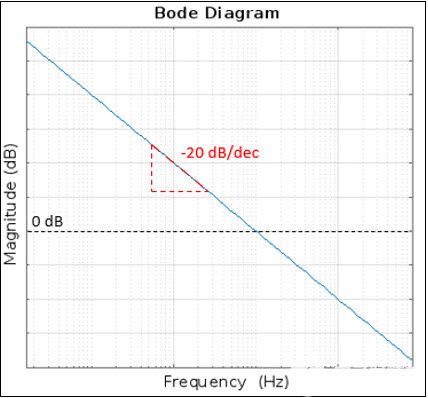
圖2.典型降壓轉換器增益幅度響應(CMC),具有II類補償。
具有II類補償的典型降壓轉換器增益幅度響應(CMC)
固有極點和零點以及內部補償可能無法提供用戶所需的頻率響應。在這種情況下,用戶可以首先調整IC的內部控制回路,利用特定器件提供的可編程性。如果這不符合用戶的要求,則需要外部補償。這是通過在反饋電阻上并聯添加RC(串聯的電阻器和電容器)來實現超前或滯后補償的形式實現的。
鉛補償
引線補償的目的是在頻率f處引入零點和極點Z和 fP分別,其中 fZ< fP.以下是引入鉛補償的可能動機:
更高的帶寬(從而減少上升時間和建立時間)
更快的瞬態響應
提高穩定性(通過增加相位裕量)
引線補償的一個可能的缺點是它可能會增加高頻噪聲。為了防止這種情況,以更高的頻率放置一個極點。
圖3顯示了引線補償對幅度和相位的影響。在此示例中,fZ= 10Hz 和 fP= 10kHz 使用。
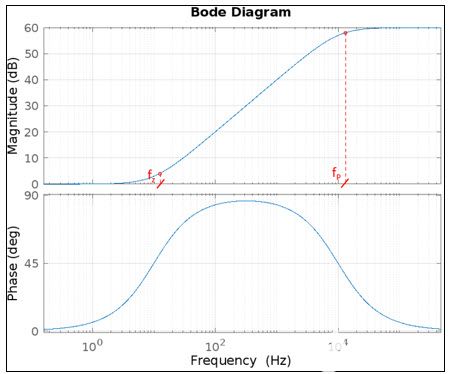
圖3.導聯補償頻率響應。
滯后補償
滯后補償的目的是在頻率f處引入極點和零點P和 fZ分別,其中 fP< fZ(<
圖4顯示了滯后補償對幅度和相位的影響。在此示例中,fP= 10Hz 和 fZ= 10kHz 使用。
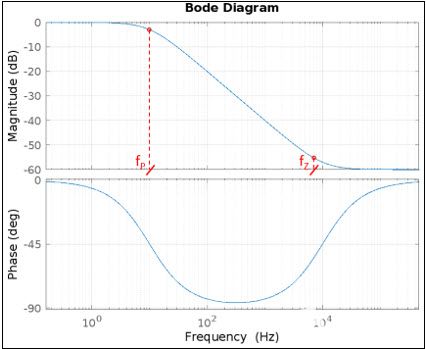
圖4.滯后補償頻率響應。
CMC 降壓轉換器的控制環路帶寬 (BW)
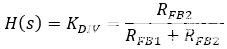
對于負載點降壓轉換器(MAX20710、MAX20812等),控制環路帶寬與反饋分壓器比成正比,下式計算:
等式 1
其中
是從 VOUT 到 VSENSE 的反饋分頻器
COUT是輸出電容
G為可編程環路增益(從IC數據手冊獲得)
對于給定的“G”和“COUT”(根據電路要求固定),帶寬減少到:

等式 2
因此,通過改變反饋比同時保持其直流比恒定(以保持所需的基準電壓),用戶可以增加或減少帶寬。
* COUT的計算包括其在額定輸出電壓下的降額
* 這種外部補償方法適用于所有帶寬與反饋比成正比的IC(如下式2)
電路實現
超前和滯后補償是通過在開關穩壓器IC外部的反饋電阻并聯添加RC網絡(串聯的電阻和電容器)來實現的。對于引線補償(如圖5a所示),在頂部反饋電阻(R認知障礙).對于滯后補償(如圖5b所示),在底部反饋電阻(R認知障礙).
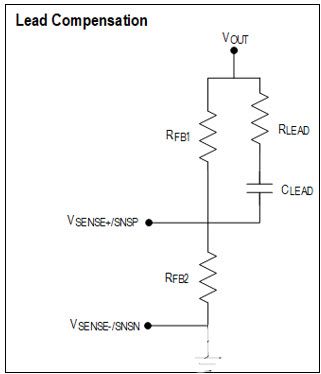
圖 5a.引線補償電路圖。
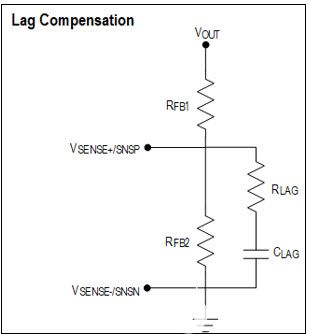
圖 5b.滯后補償電路圖。
補償對環路增益的影響 - T(s)
對于降壓穩壓器,典型環路增益T(s)如圖6所示。
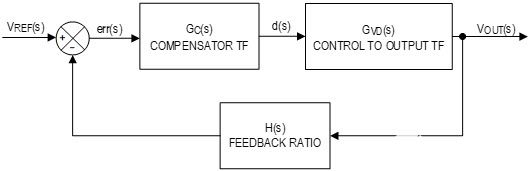
圖6.閉環降壓穩壓器框圖
環路增益 T(s) 寫為:
T(s) = GC(s) × GVC(s) × H(S)
哪里
從公式2
其中,
GC(s) 是內部補償器 TF
GVC(s) 控制降壓開關穩壓器的輸出TF
鉛補償:
包括鉛補償后,術語H(s)將修改為以下內容:
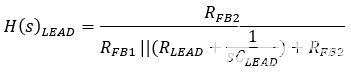
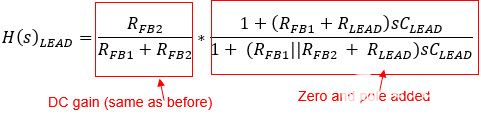
等式 3
R的串聯組合鉛和 C鉛在 F 處添加一個零點和極點Z和 fP給出者:

結果 1
并且觀察到 FZ
因此,更新的環路增益T(s)LEAD為:

等式 4
下一節將進一步詳細分析公式4。
滯后補償:
與鉛一樣,包括滯后補償,術語H(s)被修改為:
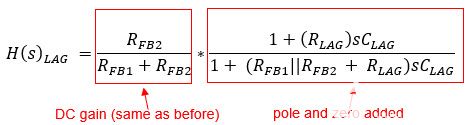
等式 5
R的串聯組合滯后和 C滯后在 F 處添加一個零點和極點Z和 fP給出者:

結果 2
并且觀察到P< fZ
因此,通過滯后補償,環路增益為:

等式 6
等式3和等式5證實,H(s)=KDIV(即,根據公式2與BW成正比),根據極點零對的位置進行修改。增加的極點-零點對根據頻率和R的值提供一定的增益/衰減鉛/滯后和 C鉛/滯后.這用于增加或減少當前 BW。
因此,在反饋電阻兩端增加串聯RC網絡會改變系統環路增益,最終改變轉換器的有效帶寬。為了分析新增加的極點和零點的影響,分別考慮超前和滯后補償。此外,極點-零點對提供的增益取決于頻率,因此使用波特圖的頻域方法來分析獲得的結果。
帶導聯補償的環路增益分析
導聯補償的主要目標是在環路增益T(s)下獲得帶寬的最大改善。本節提供元件選擇的設計方法(R鉛和 C鉛),目的是獲得給定系統的最大帶寬。
圖7所示為典型的補償電流模式控制系統。包括引線補償(外部)時,以下是響應(顯示圖7a所示系統交叉點附近的典型響應):
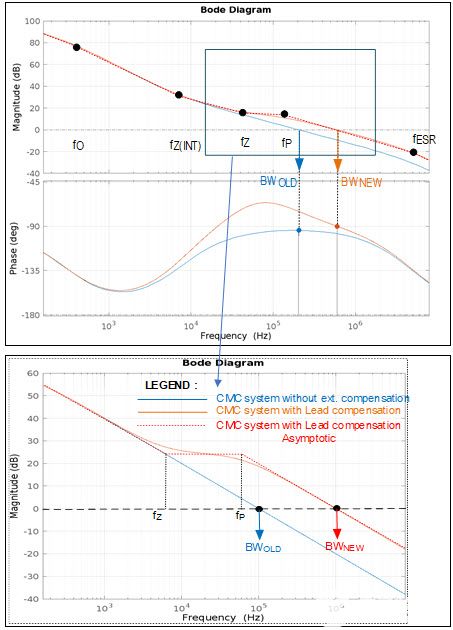
圖7.鉛補償系統的頻率響應在典型CMC系統上的疊加。
圖 7a.圖 7 的放大版本。
觀察到新添加的零點和極點在fZ和 fP使具有引線補償的系統具有從F開始的額外增益Z,這有效地導致帶寬得到改善,因為補償系統在帶寬處越過0dB線新增功能.
從圖 4 所示的圖中,通過幾何圖形得出結論:
Log(?p) - Log(?z) = Log(BWNEW) - Log(BWOLD)
這意味著,
BWNEW = BWOLD × (?p / ?Z) 等式 7
這里
BWNEW - 表示具有導聯補償的新交越頻率
BWOLD - 表示交越頻率,無需外部補償
公式7是一個重要結論,因為它將帶寬改進與極零對頻率之比直接聯系起來。該公式用于推導出RLEAD和CLEAD的值,它們提供了最大的帶寬改進。
此外,從公式7可以清楚地看出,對于最大帶寬,極零點頻率比應該是最大值。
在數學上(將結果 1 代入公式 7 的 LHS),比率簡化為:
等式 8
通過分析,觀察到公式8的最大值是在以下情況下獲得的:
R鉛<<·認知障礙||R認知障礙
由于R的推薦值認知障礙/ 1認知障礙在1kΩ至5kΩ之間,用戶可以選擇R鉛為任何值 <5Ω。
因此,對于給定的反饋電阻值,BW新增功能根據公式 7a 計算:

公式7a是計算最大帶寬的有用工具新增功能這是在給定的反饋電阻值(即給定電壓)下實現的。
通過仔細選擇 R 最大化 BW鉛、C 的值鉛決定 f 的位置Z和 fP.極點零點對的位置也會影響帶寬和相位裕量改進。
為了獲得最佳情況,將極點零點位置從低頻(低至100Hz)掃描到可能的最高頻率(由BW確定)老) 通過保持 R鉛恒定和變化的C鉛價值。
在這里,最高頻率是提供最小 C 值的頻率鉛,當 fZ= BW老.選擇高于此頻率不會為系統提供導聯線補償。要避免這種情況,請選擇 C鉛大于以下值:
對多個系統配置進行了全面的仿真和硬件測試,得出了以下結果:
將極點零點對放置在最高頻率附近(BWOLD之前)并不能提供帶寬的最大改善,因為與漸近圖相比,幅度圖(實際圖)的交叉時間要早得多。但這種方法為系統提供了相位裕量的最大增量。
將極點零點對放置在較低頻率(< 1kHz)下可大幅降低系統的PM,但也提供了帶寬的最大改進。
因此,極零點對的最佳位置是帶寬最大,PM降低最小的地方。這介于高頻和低頻之間。
因此,為了在略微降低PM的情況下最大限度地改善帶寬,使用公式9來計算C的值鉛.該結果是通過將fP放置在BW的1/10獲得的老如下圖所示:
這意味著,CLEAD的計算公式為:

等式 9
例如,如果系統的要求不僅僅是最大帶寬,而是提高帶寬和PM的功率,那么C鉛減少以調整所需的最佳情況。降低 C鉛減少了帶寬的改進,但增加了系統的PM。
以下是 C 的范圍鉛:
為了改善體重和粉末反射,但不能改善最大體重:

對于最大帶寬(PM 沒有改善):

引線補償硬件測試和結果
上述理論利用MAX20710和MAX20812評估板進行測試。多個 C外數值用于驗證理論和實踐結果的一致性。此處顯示了其中一個結果。
為了進行測試,將串聯R-C網絡與RFB1并聯添加,用于使用上述公式計算的導線補償和串聯元件的值。用于實驗的組分具有1%(R鉛和 C鉛).
進行的測試使用公式9計算C鉛.該測試的主要目的是在PM降低最小的情況下獲得最大的BW。
MAX20710評估板得到C結果外= 1600μF
以下是用于測試的值,它還包括 fZ和 fP使用所用組件獲得的值。
| RFB1 and RFB2 | VOUT | RLEAD (?) | CLEAD (Calculated) | CLEAD (Used in Ckt) | fZ (kHz) | fP (kHz) |
| 1.87kΩ 和 3.48kΩ | 1V | 0 | 19.5nF | 18.3nF | 4.67 | 7.21 |
| - | 帶寬(千赫) | 下午 (°) |
| 空載 | ||
| 無償 | 67.436 | 58.876 |
| 鉛補償 | 98.408 | 49.769 |
| 滿載 | ||
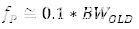
| 無償 | 69.285 | 58.037 |
| 鉛補償 | 112.604 | 50.257 |
根據公式7a,可實現的最大改進為103.673kHz。
從表2的結果可以看出,改善與BW的計算值完全匹配新增功能即 BW老按極點到零頻率比縮放。
如前所述,盡管這種方法提供了帶寬的最大改善,但系統的PM略有降低(~8°),這主要是由于系統在較高BW下的較低相位。這是通過稍微減小 C 的值來調整的鉛.
降低 C鉛值可能會略微降低帶寬,但會改善PM,因為引線補償提供了一些相位提升。
因此,公式9為最大帶寬改進提供了最佳結果。這始終是執行首次通過結果的領先補償的良好起點。
注意:最大帶寬改進根據 R 的值推遲認知障礙和 R認知障礙,即不同 V 的不同改進外.
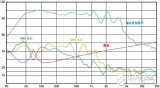
如圖8a和圖8b所示,以下是滿載= 10A情況下環路增益的波特圖(值如表2所示)。
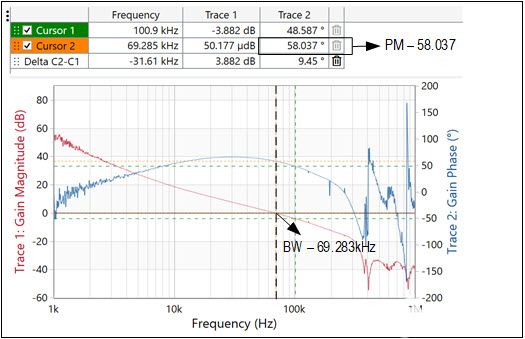
圖 8a.顯示未補償的 s/m。
圖 8b. 顯示鉛補償 s/m。
BW(頻域)的增加直接轉化為系統瞬態響應(時域)的改進,即隨著帶寬的增加,系統對干擾的響應更快。
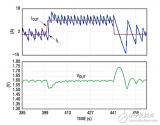
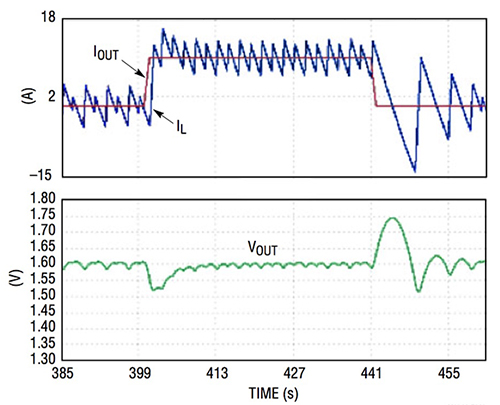
使用2A至10A的脈沖負載和8A/μs斜坡測試響應,結果如圖9a和圖9b所示。
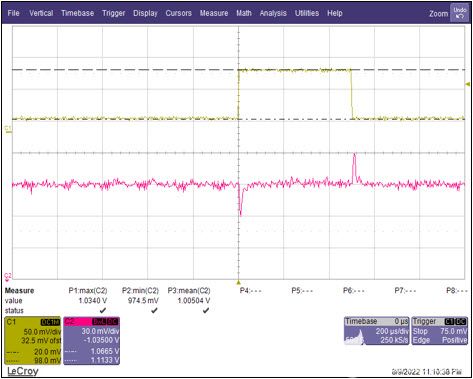
圖 9a.使用 C 顯示未補償的 s/m外= 1600μF。
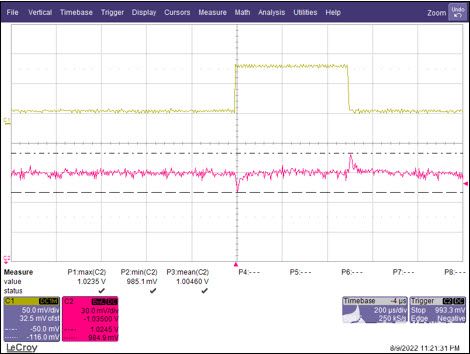
圖 9b. 顯示帶 C 的鉛補償 s/m外= 1600μF。
| 過頭 | |
| V中的未補償過沖出峰(毫伏) | 28.8 |
| V級導線補償過沖出峰(毫伏) | 17.7 |
| Δ V出峰- 過沖減少(mV) | 11.1 |
| 負脈沖信號 | |
| V中的無補償下沖出峰(毫伏) | 30 |
| V級鉛補償下沖出峰(毫伏) | 21.9 |
| Δ V出峰- 下沖減少(mV) | 8.1 |
觀察到瞬態期間的下沖和過沖在帶寬改善后降低了~8mv至10mV。因此,這是通過最后一刻調整來滿足規格的好方法。
MAX20812評估板C結果外= 870μF
對MAX20812評估板進行類似的分析,元件值如表4所示。
| RFB1 and RFB2 | VOUT | RLEAD (?) | CLEAD (Calculated) | CLEAD (Used in Ckt) | fZ (kHz) | fP (kHz) |
| 3.01kΩ 和 3.01kΩ | 1V | 0 | 25.6nF | 25.3nF | 2.09 | 4.18 |
| - | 帶寬(千赫) | 下午 (°) |
| 空載 | ||
| 無償 | 41.341 | 64.924 |
| 鉛補償 | 78.106 | 61.112 |
| 滿載 | ||
| 無償 | 46.893 | 68.28 |
| 鉛補償 | 82.685 | 62.05 |
同樣,根據公式7a,可實現的最大改進為82.682kHz。
從表5的結果可以看出,改善與BW的計算值完全匹配新增功能,即 BW老按極點到零頻率比縮放。
對MAX20710的要求需要更多改進的原因是R的差異認知障礙和 R認知障礙在相同輸出電壓下,MAX20812與MAX20710的比較值,最終改變公式7a中的極點至零頻率比。因此,為了更好地改進 BW,具有較低值 R 的配置。認知障礙(與 R 相比認知障礙) 是優選的。
如圖10a和圖10b所示,以下是滿載= 6A時環路增益的波特圖(值如表5所示)。
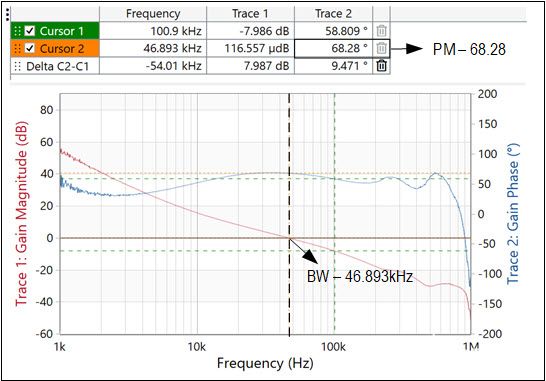
圖 10a.顯示未補償的 s/m 波特。
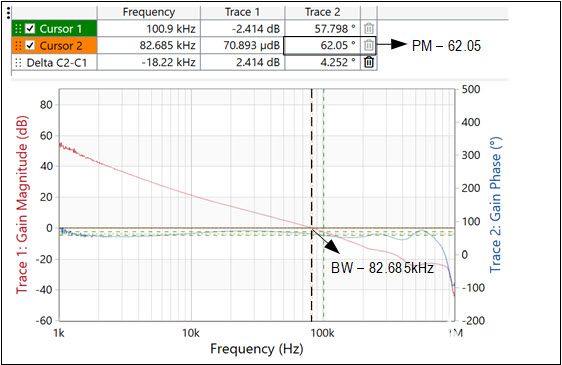
圖 10b. 顯示鉛補償 s/m 值。
對于1A至6A的脈沖負載和5A/μs斜坡,瞬態響應改進如下:
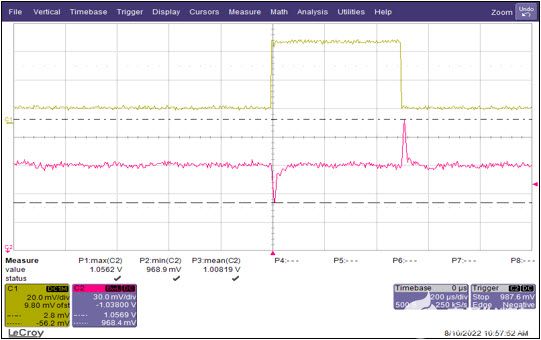
圖 11a.使用 C 顯示未補償的 s/m外= 870μF。

圖 11b. 顯示帶 C 的鉛補償 s/m外= 870μF。
| Overshoot | |
| Uncompensated Overshoot in VOUT PEAK (mV) | 48.1 |
| Lead compensated Overshoot in VOUT PEAK (mV) | 27.1 |
| Δ VOUT PEAK - Overshoot reduction (mV) | 21.1 |
| Undershoot | |
| Uncompensated Undershoot in VOUT PEAK (mV) | 33.5 |
| Lead compensated Undershoot in VOUT PEAK (mV) | 22.5 |
| Δ VOUT PEAK - Undershoot reduction (mV) | 11.1 |
電壓的下沖和過沖降低了10mV至20mV,這是巨大的,與MAX20710以前的情況相比,這更好。這僅僅是由于MAX20812情況下帶寬增加更多。
從上述結果可以看出,超前補償是通過在R上添加一個簡單的串聯RC網絡來實現的。認知障礙,其中 BW 的最大改進受 f 位置的限制Z和 R 的值認知障礙和 R認知障礙.這種補償方法僅用于在一定程度上改善BW;因此,當系統的所有其他組件都使用變量C固定時,使用外部補償外要求。因此,如果需要在最后一刻進行帶寬修改(有/沒有PM改進),則鉛補償是實現它的最佳方法。
帶滯后補償的環路增益
滯后補償的主要目的是改善相位裕量(PM)并降低環路增益T(s)的帶寬(假設系統在較低的帶寬下PM較高)。這是在系統具有低 C 的情況下完成的外值,這會導致帶寬接近開關頻率 (f西 南部),導致系統中的噪聲較高。
本節提供元件選擇的設計方法(R滯后和 C滯后),目的是減少交叉并在新的BW上改善PM。
注意:不要最大化帶寬降低,因為這會降低系統性能。
圖12所示為典型的補償電流模式控制系統。包含滯后補償后,疊加圖就是響應。
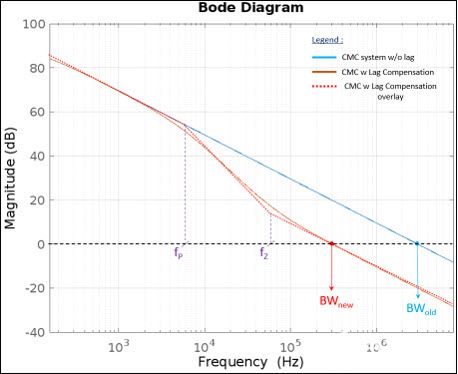
圖 12.滯后補償系統的頻率響應在典型CMC系統上的疊加。
設計方法與引線補償方法略有不同。在這里,PM改進是從系統(即沒有外部補償)而不是從滯后補償中獲得的。事實上,滯后補償對系統相位的影響會減弱,如圖4所示。
因此,對于滯后補償系統,PM最佳改進(以較低帶寬從系統獲得)的標準是:
對于計算,用戶可以考慮邊界情況,即

選擇 CLAG= 10nF(以獲得最佳帶寬降低并避免環路不穩定問題)。增加 C 的值滯后大幅降低帶寬,因為 fP放置在小于500Hz的頻率下,這導致增益曲線更快地越過0dB。
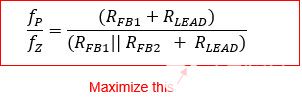
R 的值滯后根據結果 2 計算得出,由下式給出:
等式 10
因此,R 的任何值滯后大于或等于公式10中的值可提供滯后補償的最佳結果。
對于較低的帶寬,fZ進一步向下移動(即 fZ< 0.1BW老) 通過增加 C滯后并降低 R 的值滯后.這會將極點-零點對移動到較低的頻率,從而進一步改善系統的PM。
BW的價值新增功能通過滯后補償從上述 R 獲得滯后和 C滯后值提供 F 的最小減少C這樣補償系統的PM就不會因滯后補償而降低。
滯后補償硬件測試和結果
上述理論利用MAX20710和MAX20812評估板進行測試。為了進行測試,與R并聯添加串聯R-C網絡認知障礙,并使用上述方程計算序列元素的值。用于實驗的組分具有1%(R滯后和 C滯后).對于這兩種情況,C滯后使用 10nF(根據建議)。
以下是每個評估板的結果:
MAX20710評估板得到C結果外= 800μF
以下是用于測試的值,它還包括 fZ和 fP從使用的組件獲得的值。
| RFB1 and RFB2 | VOUT | CLAG | RLAG (Calculated) | RLAG (Used in Ckt) | fZ (kHz) | fP (kHz) |
| 1.87kΩ 和 3.48kΩ | 1V | 10nF | 1.35kΩ | 1.5kΩ | 12.566 | 6.41 |
| - | 帶寬(千赫) | 下午 (°) |
| 空載 | ||
| 無償 | 125.669 | 37.984 |
| 滯后補償 | 84.523 | 54.438 |
| 滿載 – 6A | ||
| 無償 | 127.192 | 38.13 |
| 滯后補償 | 83.319 | 54.198 |
從上述結果可以看出,隨著交越頻率或帶寬的降低,PM改善了~20°。對于分頻器的輕微修改,R滯后進一步調整(如前所述),但這僅將分頻器偏移了很小的幅度。
圖13a和圖13b顯示了滿載= 10A時環路增益的波特響應(值如表8所示)。
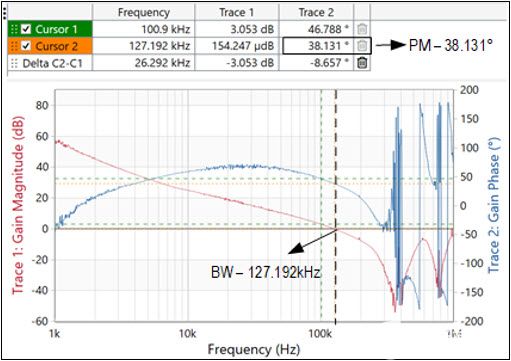
圖 13a.顯示未補償的 s/m 波特。
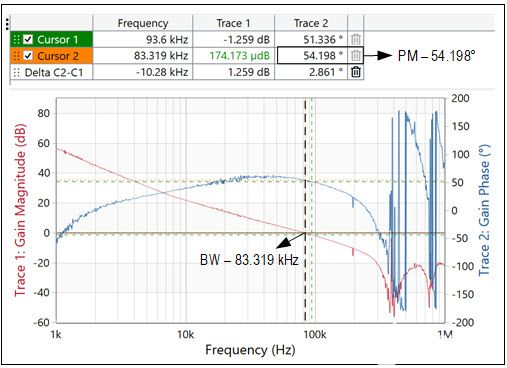
圖 13b. 顯示了滯后補償的 s/m 波特。
MAX20812評估板得到C結果外= 270.1μF
對MAX20812評估板進行類似的分析,元件值如表9所示。
| RFB1 and RFB2 | VOUT | CLAG | RLAG (Calculated) | RLAG (Used in Ckt) | fZ (kHz) | fP (kHz) |
| 3.01kΩ 和 3.01kΩ | 1V | 10nF | 1.4249kΩ | 1.42kΩ | 11.169 | 6.025 |
表9顯示了組分值和其他計算量。
| RFB1 and RFB2 | VOUT | CLAG | RLAG (Calculated) | RLAG (Used in Ckt) | fZ (kHz) | fP (kHz) |
| 3.01kΩ 和 3.01kΩ | 1V | 10nF | 1.4249kΩ | 1.42kΩ | 11.169 | 6.025 |
| - | 帶寬(千赫) | 下午 (°) |
| 空載 | ||
| 無償 | 111.69 | 55.714 |
| 滯后補償 | 65.898 | 63.079 |
| 滿載 – 6A | ||
| 無償 | 131.651 | 52.574 |
| 滯后補償 | 70.925 | 66.9 |
在這種情況下,改進了~11°,低于前一種情況,因為這種改進來自系統本身,不依賴于補償。
圖14a和圖14b顯示了滿載= 6A時補償和未補償系統的波特圖(值如表10所示)。
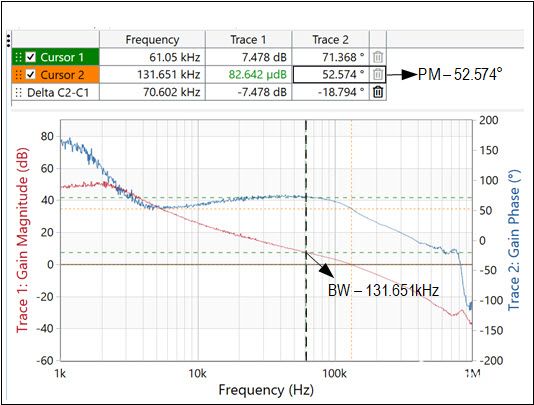
圖 14a.顯示未補償的 s/m 波特。
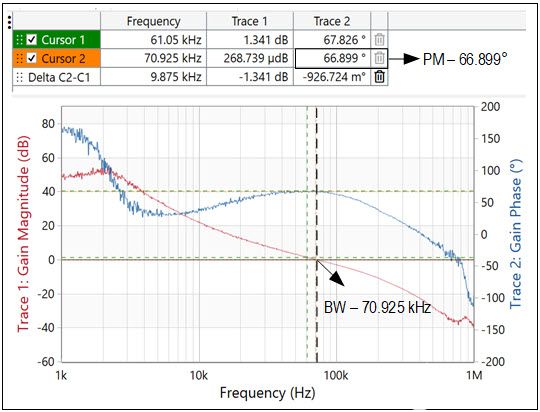
圖 14b. 顯示鉛補償 s/m 值。
如前所述,滯后補償并不經常使用,它主要用于系統C低的情況外計數(即高交越頻率)。
雖然,通過這種方法用戶可以將BW推到一個低得多的值,但建議不要低于f的1/10西 南部,因為系統性能下降主要與瞬態行為有關。
因此,滯后補償是改善PM的最佳方法之一,并具有降低系統帶寬的額外好處。
結論
外部補償獲得的結果適用于文檔開頭提到的部件號。它也可以應用于任何其他ADI的電源管理IC,這些IC具有類似形式的帶寬方程,即與反饋比成正比。
在這種情況下,建議在反饋電阻兩端安裝一個用于RC網絡的DNI/DNP焊盤,這在電路板的測試階段帶來了靈活性,以獲得必要的穩定性裕量。
綜上所述,外部補償是提升原始系統性能的方法之一。
審核編輯:郭婷
-
轉換器
+關注
關注
27文章
8707瀏覽量
147230 -
電阻器
+關注
關注
21文章
3784瀏覽量
62149 -
穩壓器
+關注
關注
24文章
4241瀏覽量
93836
發布評論請先 登錄
相關推薦
改善開關穩壓器頻率響應的補償器網絡設計
頻率響應是什么意思_頻率響應特性
頻率響應介紹_頻率響應概念

音響頻率響應多少好_頻率響應大好還是小好





 工商網監
工商網監
評論