 相控陣天線方向圖:光柵瓣和波束斜視
相控陣天線方向圖:光柵瓣和波束斜視
作者:Peter Delos, Bob Broughton, and Jon Kraft
這是我們關于相控陣天線方向圖的三部分系列文章的第二篇。在第1部分中,我們介紹了相控陣轉向概念,并研究了陣列增益的影響因素。在第 2 部分中,我們將討論光柵瓣和光束斜視。光柵波瓣可能很難可視化,因此我們將利用它們與數字轉換器中的信號混疊的相似性,然后用它來將光柵波瓣視為空間混疊。接下來,我們探討光束斜視的問題。波束斜視是當我們使用相移而不是真正的時間延遲來控制波束時,天線在整個頻率上的失焦。我們還將討論這兩種轉向方法之間的權衡,并了解光束斜視對典型系統的影響。
光柵瓣簡介
到目前為止,我們只看到了元素間距為 d = λ/2 的情況。圖1開始說明為什么晶片間距λ/2是相控陣中如此常見的指標。顯示了兩個案例。首先,在藍色中,重復第 30 部分圖 11 中的相同 1° 圖。接下來,將d/λ間距增加到0.7,以顯示天線方向圖如何變化。隨著間距的增加,請注意波束寬度是如何減小的,這是一個積極的結果。零點間距的減小使它們更緊密地結合在一起,這也是一個可接受的結果。但現在有第二個角度,在本例中為–70°,那里有全陣列增益。這是一個非常不幸的結果。天線增益的復制品定義為光柵瓣,可視為空間混疊。
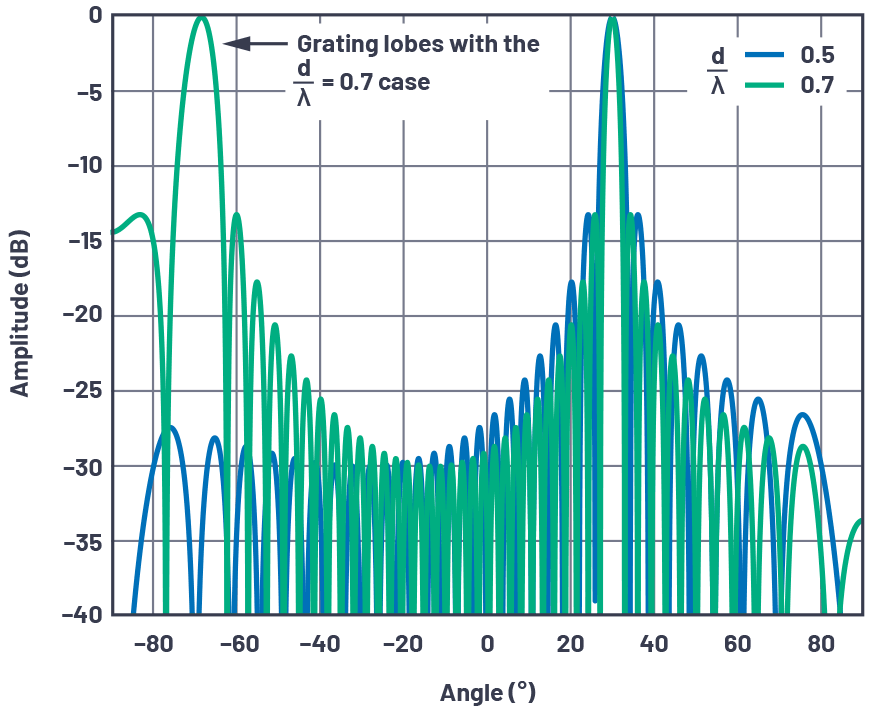
圖1.兩個不同 d/λ 間距的 32 元素線性陣列的歸一化數組因子。
與采樣系統的類比
可視化光柵瓣的一個類比是考慮采樣系統中的混疊。在模數轉換器(ADC)中,在頻率規劃接收器架構時,通常使用欠采樣。欠采樣涉及有目的地降低采樣率(fS),使得采樣過程轉換高于f的頻率S/2(較高的奈奎斯特區)在第一個奈奎斯特區中顯示為別名。這會導致這些較高頻率在ADC輸出端看起來好像處于較低頻率。
在相控陣中也可以考慮類似的類比,其中晶片對波前進行空間采樣。如果我們建議每個波長需要兩個樣本(即元素)以避免混疊,奈奎斯特定理可以擴展到空間域。因此,如果元素間距大于 λ/2,我們可以考慮這種空間混疊。
計算光柵瓣出現的位置
但是這些空間別名(光柵瓣)會出現在哪里呢?在第1部分中,我們展示了應用于陣列中晶片的相移作為光束角的函數。

相反,我們可以計算光束角作為相移的函數。

arcsin 函數僅為 –1 和 +1 之間的參數生成實際解。在這些界限之外,解決方案不是真實的——電子表格軟件中熟悉的“#NUM!另請注意,公式2中的相位是周期性的,每2π重復一次。因此,我們可以在波束轉向方程中用 (m × 2π + ?Φ) 代替 ?Φ,得到公式 3。

其中 m = 0, ±1, ±2, ...
為了避免光柵瓣,我們的目標是獲得一個真正的解決方案。在數學上,這是通過保持

如果我們這樣做,那么所有的空間圖像(即m = ±1,±2等)將產生非真實的arcsin結果,我們可以忽略它們。但是,如果我們不能做到這一點,因此 m > 0 的某些值會產生真正的反弧結果,那么我們最終會得到多種解決方案:光柵瓣。
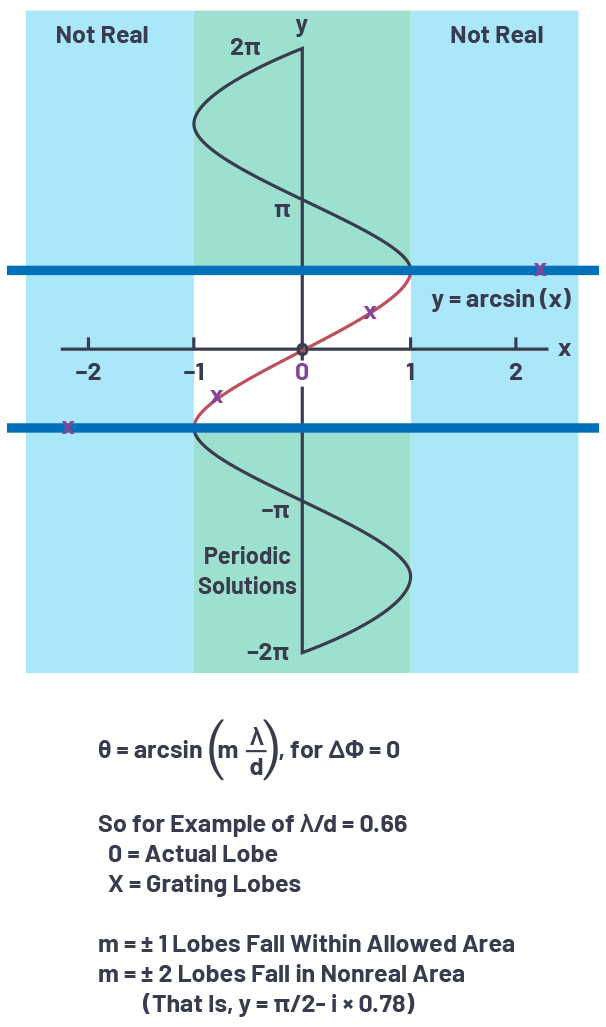
圖2.弧軸函數在光柵瓣中的應用。
光柵瓣 d > λ 和 θ = 0°
讓我們嘗試一些示例來更好地說明這一點。首先,考慮機械視鏡下的情況,其中 θ = 0,因此 ?Φ = 0。然后,公式3簡化為公式5。

從這種簡化中可以明顯看出,如果 λ/d > 1,那么只有 m = 0 可以給出一個介于 –1 和 +1 之間的參數。這個參數只是 0,arcsin(0) = 0°,即機械瞄準角。所以,這一切都如我們所期望的那樣。此外,對于任何 m ≥ 1,arcsin 參數將太大 (>1),并且生成的答案將不是真實的。當 θ = 0 和 d < λ 時,我們將看不到光柵瓣!
但是,如果 d > λ(因此 λ/d 為 <1),則可能存在多種解,即光柵瓣。例如,如果 λ/d = 0.66(即 d = 1.5λ),則當 m = 0 和 m = ±1 時,將存在實反弧解。m = ±1是第二個解決方案,即所需信號的空間混疊。因此,我們可以期待看到三個主瓣,每個波瓣的振幅大致相等,分別位于arcsin(0 × 0.66),arcsin(1 × 0.66)和arcsin(–1 × 0.66)。以度為單位,這些角度為 0° 和 ±41.3°。事實上,這就是我們的陣列因子圖如圖 3 所示。
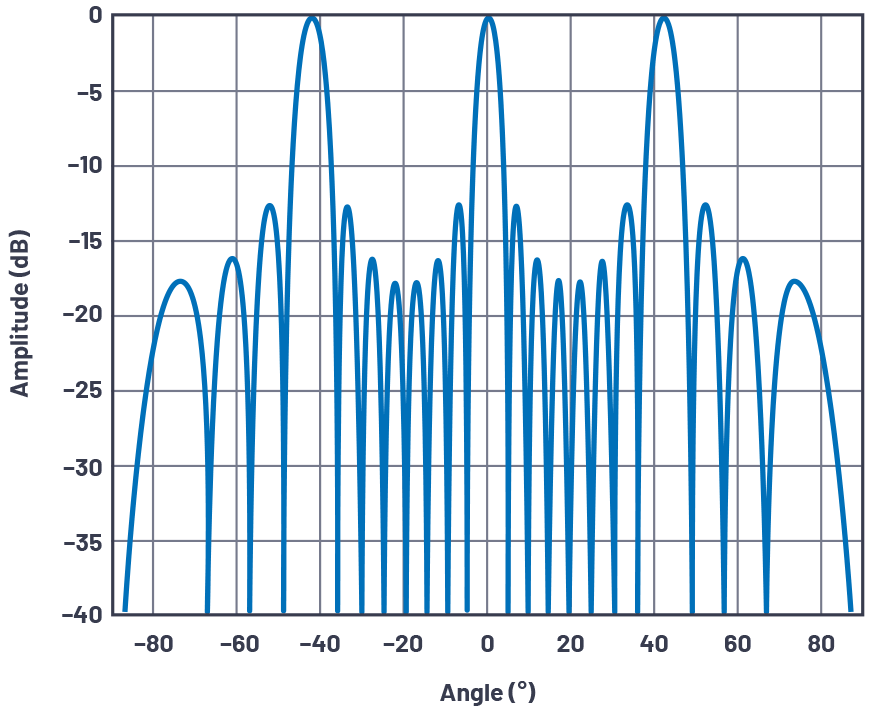
圖3.視線時的陣列系數為 d/λ = 1.5,N = 8。
光柵瓣 λ/2 < d < λ
在簡化光柵瓣方程(公式5)時,我們選擇只看機械視孔(?Φ = 0)。我們看到,在機械視線下,光柵瓣不會出現d<λ。但是從我們對采樣理論的類比中,我們知道我們也應該期望看到任何大于λ/2的間距的某種光柵瓣。那么 λ/2 < d < λ 的光柵瓣在哪里?
首先,回想一下第 4 部分圖 1 中的相位如何隨轉向角而變化。我們看到?Φ范圍從0到±π,因為主瓣偏離了機械視線。因此

將范圍

而對于|米|≥ 1,它將永遠超越

這限制了最小允許的λ/d,如果我們想將整個arcsin參數保持>所有|m的1|≥ 1.考慮兩種情況:
如果 λ/d ≥ 2(即 d ≤ λ/2),則無論 m 的值如何,您都不可能有多個解。所有 m > 0 解決方案都將在 1 >產生 arcsin 參數。這是避免光柵瓣到地平線的唯一方法。
但是,如果我們故意將?Φ限制在小于±π的水平,那么我們可以容忍較小的λ / d并且仍然看不到光柵瓣。減小?Φ的范圍意味著減小陣列的最大轉向角。這是一個有趣的權衡,將在下一節中探討。
元素間距注意事項
元素間距是否應始終小于 λ/2?不一定!這成為天線設計人員需要考慮的權衡。如果光束完全轉向地平線,則θ = ±90,并且需要λ/2的單元間距(如果可見半球不允許光柵瓣)。但在實踐中,可實現的最大轉向角始終小于 90。這是由于元素因素和大轉向角下的其他退化造成的。°°
從弧線圖(圖2)中,我們可以看到,如果y軸θ被限制在減小的極限內,則光柵波瓣僅出現在無論如何都不使用的掃描角度處。這個減少的極限(θ.max) 表示給定元素間距 (d.max)?我們之前說過,我們的目標是保持

我們可以用它來計算我們的第一個光柵瓣(m = ±1)會出現在哪里。進行此更改,并使用第 1 部分中的公式 1 表示 ?Φ,得到:

這簡化為

然后求解 d.max

這 d.max是在減小的掃描角度(θ.max),其中 θ.max小于 π/2 (90°)。例如,如果信號頻率為 10 GHz,我們需要在沒有光柵瓣的情況下轉向 ±50°,則最大元件間距為:

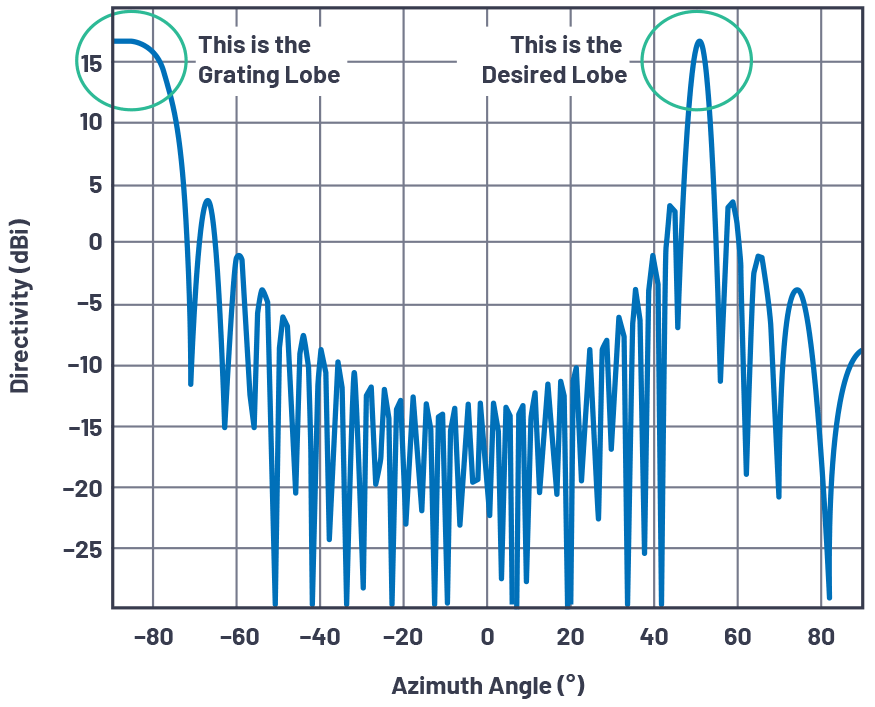
圖4.光柵瓣開始出現在地平線上,θ = 50°,N = 32,d = 17 mm,Φ = 10 GHz。
因此,限制最大掃描角度可以自由地擴展元件間距,以增加每個通道的物理尺寸,并擴展給定數量元件的孔徑。可以利用這種現象的示例應用是將天線分配給相當狹窄的預定義方向。對于預定義方向的方向性,可以增加晶片增益,也可以為更大的孔徑增加晶片間距。兩者都會導致在窄波束角內獲得更大的整體天線增益。
請注意,公式3表示一個波長的最大間距,即使轉向角為零也是如此。如果在可見半球不能容忍光柵葉,則會出現這種情況。例如,在GEO衛星的情況下,整個地球都被機械瞄準鏡9°的轉向角覆蓋。光柵瓣可能是可以容忍的,只要它們不落在地球表面。在這種情況下,晶片間距可以是幾個波長,導致更窄的波束寬度。
還有一些值得注意的天線架構試圖通過產生不均勻的元件間距來克服光柵瓣問題。這些被歸類為非周期性陣列,以螺旋陣列為例。出于機械天線結構的原因,可能需要有一個可以縮放到更大陣列的通用構建塊,但這會產生一個受所述光柵瓣條件影響的均勻陣列。
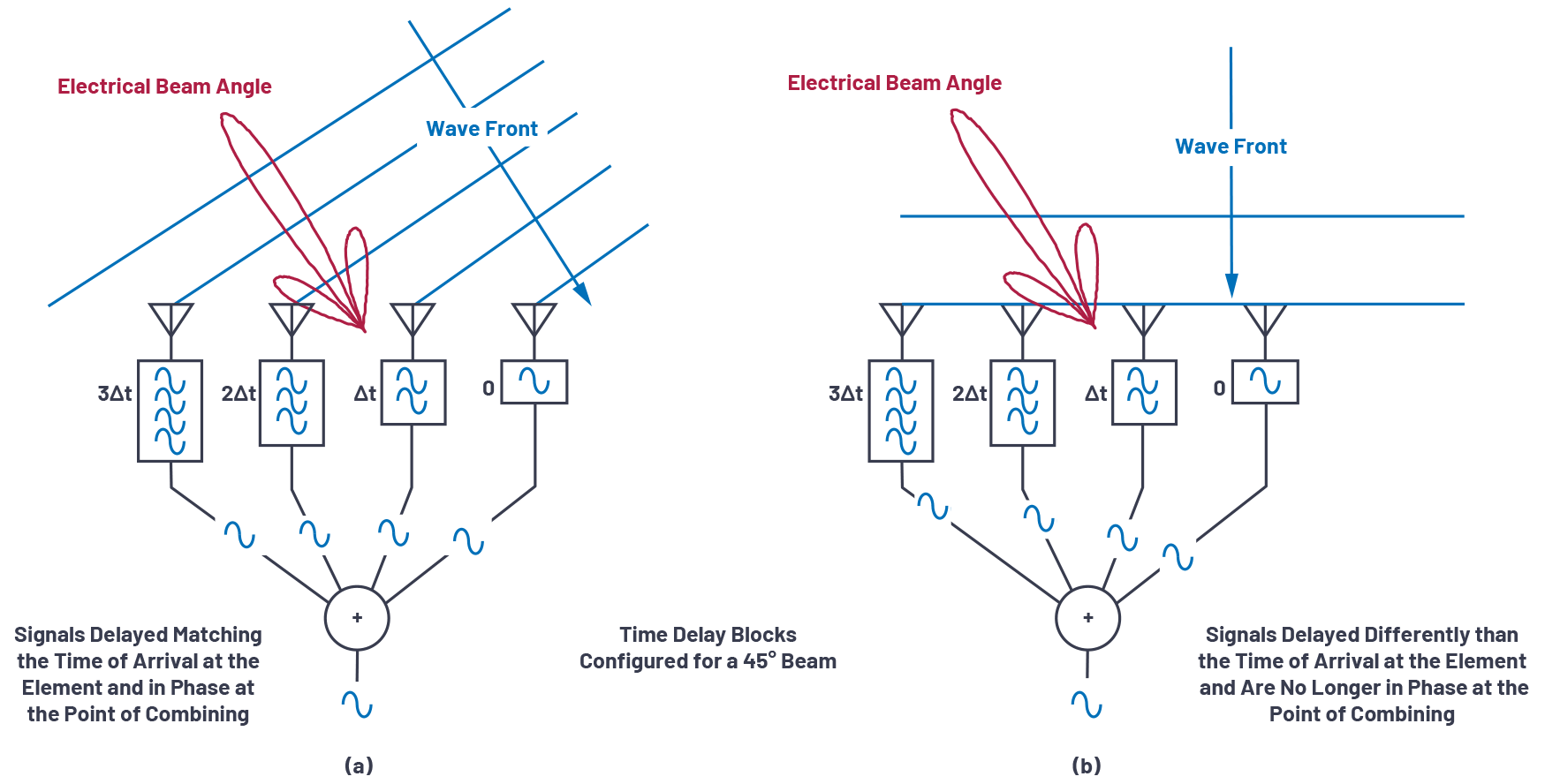
光束斜視
我們在第 1 部分的開頭描述了當波前接近元素陣列時,基于波前角 θ 相對于視線的波前角 θ,元素之間如何存在時間延遲。對于單個頻率,可以通過用相移代替時間延遲來實現波束控制。這適用于窄帶波形,但對于波束控制由相移產生的寬帶波形,波束可以隨頻率改變方向。如果我們記住時間延遲是線性相移與頻率的關系,則可以直觀地解釋這一點。因此,對于給定的波束方向,所需的相移隨頻率的變化。或者相反,對于給定的相移,光束方向隨頻率變化。光束角隨頻率變化的概念稱為光束斜視。
還要考慮到,在視線θ = 0時,晶片之間沒有相移,因此無法產生任何光束斜視。因此,光束斜視量必須與角度θ以及頻率變化成函數。圖 5 顯示了一個 X 波段示例。在本例中,中心頻率為10 GHz,調制帶寬為2 GHz,很明顯,波束會隨著頻率和初始波束角的函數而改變方向。
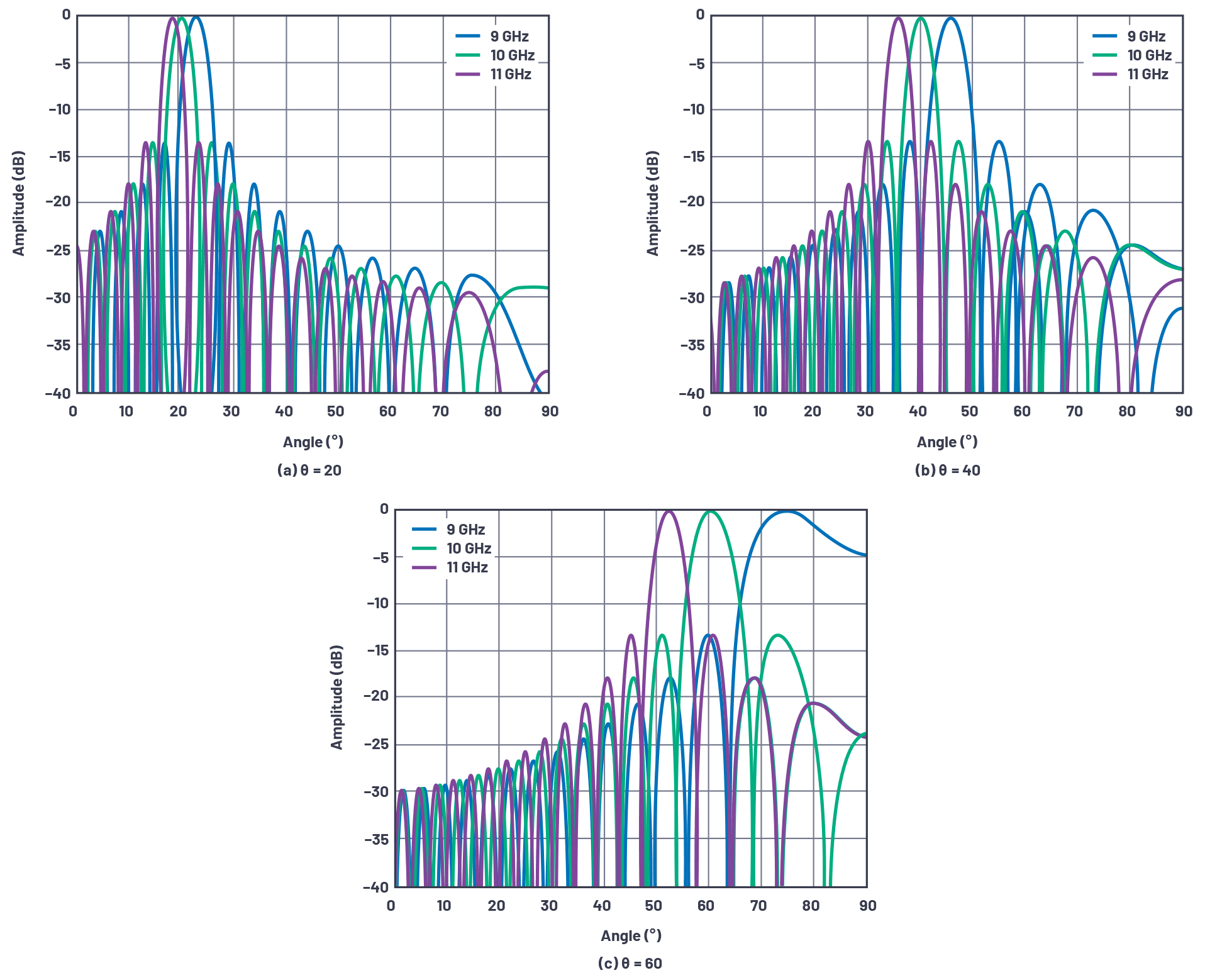
圖5.X 波段的光束斜視示例,用于具有 λ/32 晶片間距的 2 晶片線性陣列。
光束斜視可以直接計算。使用公式1和公式2,光束方向偏差(光束斜視)可以計算為:

該等式如圖6所示。在圖6中,f/f。0顯示的比例是有意為之。(f0上一個等式中的 /f) 提供了一種更簡單的方法來可視化相對于中心頻率的變化。
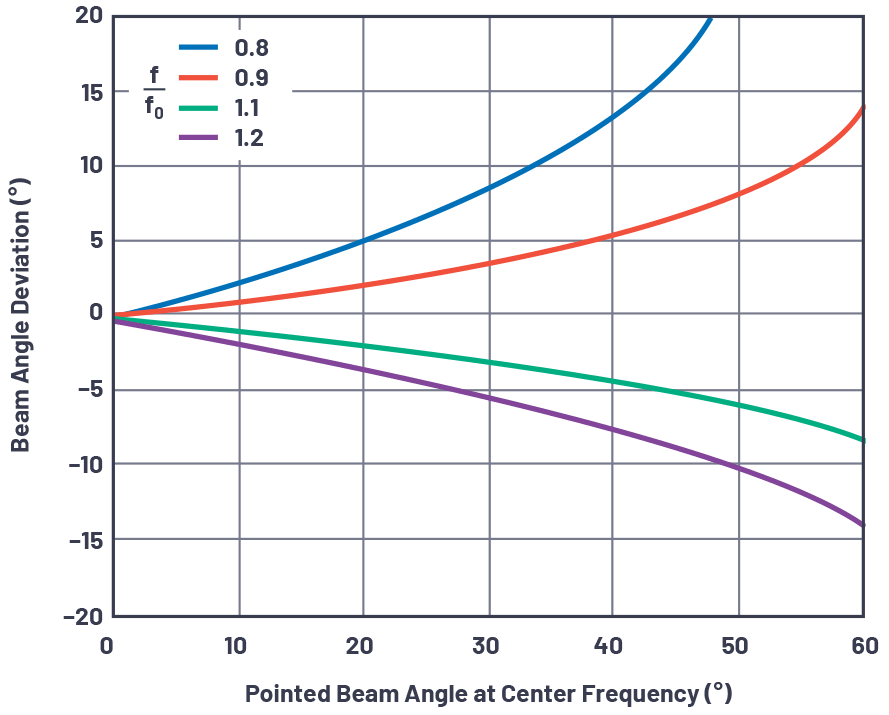
圖6.幾個頻率偏差的光束斜視與光束角的關系。
關于光束斜視的一些觀察:
光束角與頻率的偏差隨著遠離視線的光束角的增加而增加。
低于中心頻率的頻率比高于中心頻率的頻率會導致更大的偏差。
低于中心頻率的頻率使光束遠離視線。
光束斜視注意事項
光束斜視,轉向角與頻率的偏差,是由相移近似的時間延遲引起的。使用真正的時間延遲單元實現波束控制不存在這個問題。
由于光束斜視問題如此清晰可見,為什么有人會使用移相器而不是時間延遲單元?通常,這歸結為設計簡單性和移相器的IC可用性與時間延遲。時間延遲在某種形式的傳輸線中實現,所需的總延遲是孔徑大小的函數。迄今為止,大多數可用的模擬波束成形IC都是基于相移的,但出現了一系列真正的延時IC,這些IC在相控陣實現中可能變得更加普遍。
在數字波束成形中,可以在DSP邏輯和數字波束成形算法中實現真正的時間延遲。因此,每個晶片都數字化的相控陣架構自然有助于克服聲束斜視問題,同時提供最具可編程性的靈活性。但是,這種解決方案的功耗、尺寸和成本可能存在問題。
在混合波束成形中,子陣列采用模擬波束成形,然后是全陣列的數字波束成形。這可以提供一些值得考慮的自然光束斜視緩解。光束斜視僅受子陣列的影響,子陣列的波束寬度要寬得多,因此它對光束角偏差的容忍度更高。因此,只要子陣列波束斜視是可以容忍的,那么混合波束成形架構就可以在子陣列中使用移相器來實現,然后在數字波束成形中實現真正的時間延遲。
總結
相控陣天線方向圖由三部分組成的系列文章的第2部分到此結束。在第 1 部分中,我們介紹了光束指向和陣列因子。在第 2 部分中,我們介紹了光柵瓣和光束斜視的缺陷。在第3部分中,我們將討論逐漸變細作為減少旁瓣的方法,并深入了解移相器量化誤差的影響。
審核編輯:郭婷
-
轉換器
+關注
關注
27文章
8726瀏覽量
147421 -
接收器
+關注
關注
14文章
2473瀏覽量
71990 -
adc
+關注
關注
98文章
6513瀏覽量
545022
發布評論請先 登錄
相關推薦
相控陣天線方向圖:線陣波束特性和陣列因數
相控陣天線方向圖——第2部分:柵瓣和波束斜視
機載天線方向圖位置優化配置設計
相控陣天線波束控制的基本原理和波控系統的任務
相控陣天線通道誤差對波束形成的影響解析

HFSS結合UTD計算,分析機載對相控陣天線方向圖的影響
相控陣天線通道誤差對波束形成有什么樣的影響






 工商網監
工商網監
評論