") 蔚來汽車ET7的NOP體驗
蔚來汽車ET7的NOP體驗
最近我們試駕了蔚來的ET7,主要是想感受一下NOP。
先說結(jié)論:總體來說體驗非常好。之前沒有購買小鵬的X Pilot,一方面還是比較保守,風(fēng)險厭惡;另一方面對新技術(shù)處于觀望的心態(tài)。但我們換下一輛車的時候,應(yīng)該會購買輔助駕駛服務(wù)的。
Part 1
蔚來自動駕駛初體驗感受
在高清地圖范圍內(nèi),比如市區(qū)高架、高速, 是可以通過方向盤上的實體按鍵,一鍵打開領(lǐng)航輔助駕駛;超出高清地圖范圍,領(lǐng)航輔助會自動變?yōu)镻ilot,同時系統(tǒng)也發(fā)出明確的提示音,提醒駕駛員需要更多地監(jiān)管車輛。
領(lǐng)航輔助和Pilot,有點(diǎn)像貴婦化妝品和和平替。在使用上的區(qū)別在于:
●領(lǐng)航輔助可以設(shè)置好導(dǎo)航地點(diǎn)后,完全按導(dǎo)航路線自動行駛:自行變道、上下匝道;同時還能根據(jù)路況自行判斷是否要超車,有時探出車頭發(fā)現(xiàn)情況有變,還會一邊自言自語說現(xiàn)在不適合超車,一邊回到原來的道路。特別像個普通人在開車,萌萌噠。
總之在高清地圖的加持下,領(lǐng)航輔助基本上可以不需要司機(jī)接管,自己完成駕駛路線。
●上面的功能,Pilot都沒有,所以遇到需要拐彎等情況,得靠司機(jī)自己;地面路況,經(jīng)常會有車道線無法識別的情況(比如十字路口),這時系統(tǒng)也會更多地提醒司機(jī)接管,或者干脆直接退出。
另外,就算地面路況特別好(車道線清楚、導(dǎo)航路線沒問題等),但由于目前的Pilot還無法做到小學(xué)生都會的“紅燈停、綠燈行”,所以在地面路段是無法放心地把車交給系統(tǒng)駕駛的。更別提路邊還有形形色色兩輪車和行人,所以,Pilot開車,有點(diǎn)像自己在監(jiān)管系統(tǒng),有點(diǎn)意思,但用久了會累。????
●雖然大部分高架和高速都在高清地圖的標(biāo)記下,但是在高速等的隧道內(nèi)等部分路段,系統(tǒng)會提醒此處沒有領(lǐng)航輔助,轉(zhuǎn)而自行開啟Pilot;離開這樣的路段之后,領(lǐng)航輔助又會恢復(fù)。
●遇到受不了領(lǐng)航輔助的時候——領(lǐng)航在高速上的駕駛策略是,如果前車已經(jīng)在系統(tǒng)設(shè)置的限速下開(比如80的限速,已經(jīng)開到86),即使右邊的道很空曠,領(lǐng)航會一直跟車而不會主動超車——這時也可以主動接管車輛,接管完成后領(lǐng)航輔助會自動恢復(fù)。

▲圖.NOP打開后,HUD上會顯示一個小車,表示車由系統(tǒng)接管
Part 2
關(guān)于NOP以及其他輔助駕駛的一些想法

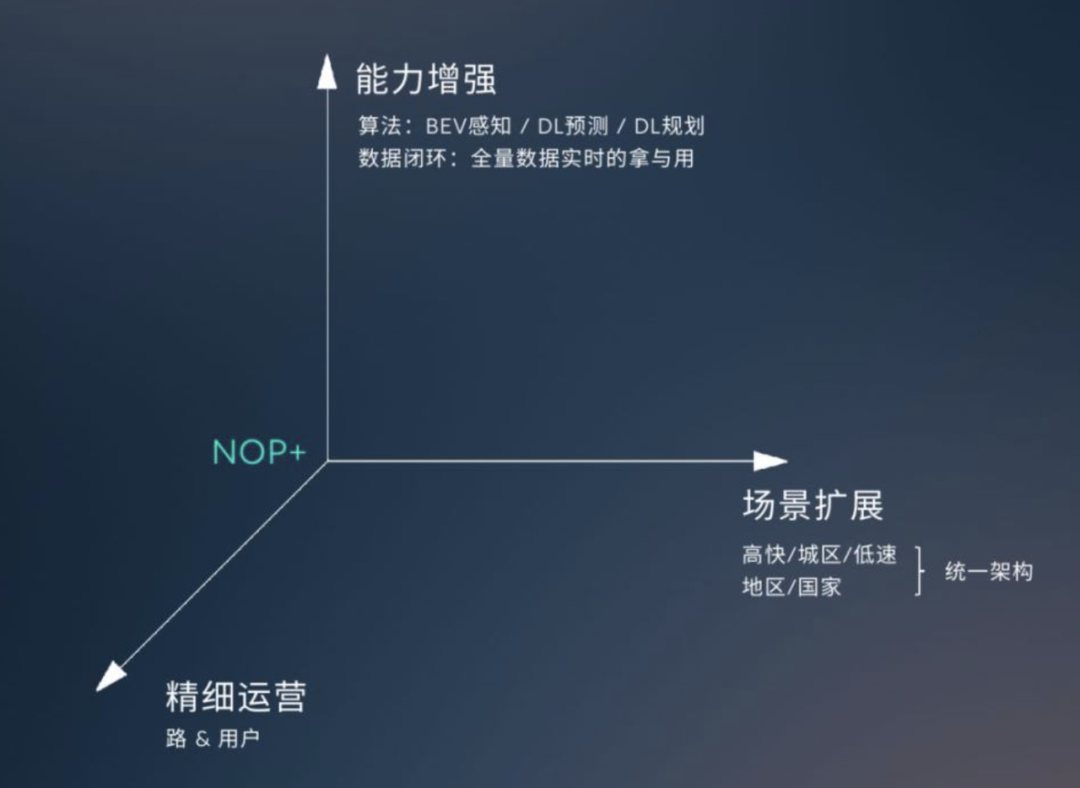
因為之前參加蔚來汽車的NOP Pilot Workshop,對這個產(chǎn)品的迭代也比較清楚。這套系統(tǒng)隨著迭代可以分場景敘述:◎低速道路:從農(nóng)村到G50的區(qū)域,采用Pilot的方式,感知圍繞激光雷達(dá),較低速度探索道路尋找可駕駛路徑。◎高速道路:G50、G1503和S32大部份道路,基于高精度地圖開發(fā)的領(lǐng)航輔助。◎匝道:這段主要在幾個高速之間銜接道路,采用Pilot模式,沒有高精度地圖通過導(dǎo)航路徑匹配,這段特別有學(xué)問。
◎維修和缺乏高精地圖的高速道路:存在領(lǐng)航輔助駕駛和Pilot的切換。
實際體驗下來:
◎低速道路:
青浦道路上就開始使用了Pilot功能,速度設(shè)置為45km/h,在青浦的農(nóng)村鄉(xiāng)村道路上使用Pilot功能,我比較擔(dān)心的是紅綠燈,其他感覺還好,因為有各種各樣的農(nóng)村三輪車和奇奇怪怪的車輛,在整個嘗試過程中,就是不斷通過前面的儀表屏幕來監(jiān)視監(jiān)視Pilot系統(tǒng)是否識別到前方各種物體,然后是否能顯示出來。
◎高速領(lǐng)航輔助功能:
總體感覺領(lǐng)航輔助駕駛的策略就是逼近極速,看到大車和掛車也是一腳油門沖上去,不斷提速。在G50朱家角路段,兩車道的高速自己開起來是很難受的,因為超車或者變道,很容易不成功。但是總體來看,G50全程21公里系統(tǒng)基本都能開下來了,期間大概有3次試圖超車,又會根據(jù)實際的情況放棄。特別是在兩車道的高速道路上,如果有大車在前面的時候,整個駕駛體驗會比較極限。總體來看,在部份道路上,如果交通流量大,規(guī)劃控制的優(yōu)化是車企需要花大力氣的。

▲圖.高速上是逼近極限的開法
◎高速領(lǐng)航和Pilot的切換:
從G50到G1503的匝道上走,系統(tǒng)從高速領(lǐng)航輔助切換到Pilot功能,使用45公里的限速來走。整體策略還是很成功的,在自動變道的時候,一般是駕駛員最為緊張的一個階段,也確實通過盲點(diǎn)檢測來判斷是否有后方車輛來確認(rèn)NOP的策略正確。如果NOP判斷時機(jī)不對,也會屢次放棄變道決策,同時系統(tǒng)會語音提示。

G1503這一段20公里左右,還有部分隧道路段,由于高精地圖缺失,高速領(lǐng)航輔助也會切換為Pilot功能。我第一次聽到領(lǐng)航輔助要退出的時候,以為系統(tǒng)要撂挑子,結(jié)果是Pilot來接管了。所以人機(jī)交互的時候,可能需要更明確地給出一些預(yù)期,目前是真的需要個人接管和兩種軟件狀態(tài)的切換下的提醒,提醒的內(nèi)容還不是那么清楚,需要駕駛員更長的適應(yīng)時間。
◎高速修路等極端情況,需要人為接管:
S32上大概有3公里是這種情況。在這個過程中主要擔(dān)心的幾個點(diǎn):
帶雪糕桶的道路上,其他車Cut in的預(yù)期會很頻繁,而且可行駛的道路本來就減少了。
這一段系統(tǒng)會提示你需要隨時接管,但是我也不清楚我什么時候接管,索性就自己來了。
最后還有一個小的風(fēng)險:在一路領(lǐng)航的過程中,高速公路上出現(xiàn)了一個塑料臉盆,系統(tǒng)沒“看到”——因為儀表盤的屏幕上沒有顯示,也沒有減速。這個對于NOP確實比較難判斷。

小結(jié):NOP領(lǐng)航輔助和Pilot確在很大的程度上讓司機(jī)在高速全程都可以依靠,隨著算法和軟件的迭代,確實能有很大的突破。總體體驗下來,高級別的輔助駕駛在擁堵的高清地圖路段特別有效,雖然并不能靠車技縮短擁堵時間,但是可以極大地緩解司機(jī)自己開車時候的煩躁心情,讓司機(jī)從擁堵中跳脫出來。遇到擁堵路段,如果大家都用輔助駕駛系統(tǒng)開車,搞不好更能緩解整體的擁堵情況。
審核編輯 :李倩
-
自動駕駛
+關(guān)注
關(guān)注
784文章
13874瀏覽量
166609 -
蔚來汽車
+關(guān)注
關(guān)注
1文章
646瀏覽量
20487
原文標(biāo)題:蔚來汽車ET7的NOP體驗
文章出處:【微信號:QCDZSJ,微信公眾號:汽車電子設(shè)計】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
蔚來ET9行業(yè)首創(chuàng)飛航環(huán)影影像系統(tǒng)
海微科技助力蔚來ET9震撼上市
官宣!小米汽車牽手蔚來、小鵬、理想

蔚來ET9獲線控轉(zhuǎn)向技術(shù)量產(chǎn)許可
蔚來交付量連續(xù)7個月超2萬 蔚來11月交付量增長近三成
蔚來成為COP29貴賓指定用車品牌
廣東電網(wǎng)與蔚來合作,肇慶首座蔚來換電站正式上線
蔚來抄不會小米作業(yè)

深藍(lán)汽車與蔚來充電實現(xiàn)互聯(lián)互通
蔚來ET7搭載150度電池包,續(xù)航里程超1000公里
蔚來全域領(lǐng)航輔助NOP+已覆蓋全國99%城市,驗證里程超
六款熱門汽車的智能座艙功能






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論