

功率因數校正(PFC)對于主要工業電機驅動器越來越重要,因為市電側對諧波含量的調節增加,以及與效率、電壓質量和導體額定值相關的額外附帶好處。數字PFC控制器比模擬控制器成本更高,而且可能更復雜。但是,當與主電機控制處理器的功能一起考慮時,它們可以提供重要的價值并增加整個系統設計的背景。本文重點介紹數字PFC控制器在工程師的整體系統監控、保護和排序環境中提供的系統級優勢。在實際電機控制系統平臺中的實現通過硬件和軟件框架方面的數字和/或圖表顯示,并進行實驗驗證。
功率因數校正(PFC)對于工業電機驅動器變得越來越重要。這主要是由于公用事業方面對諧波含量的監管增加。然而,從整體系統效率提高、導體額定值和配電電壓質量提高的角度來看,實施PFC也有充分的理由,這對于工業環境中的其他負載(例如直接在線感應電機和變壓器)可能很重要。PFC可以通過有源電路拓撲來實現,例如單相[1]或3相升壓整流器[2]或通過無源方法,其中涉及明智地使用低頻電感器和電容器來塑造交流線路電流包絡。兩種形式的PFC都試圖重現正弦或近似正弦線路電流,與線路電壓同相,從而最大限度地減少產生諧波電流和來自公用事業的無功功率流的損耗。主動和被動PFC之間的權衡與成本、被動元件重量、體積和PFC相關損耗有關。
在單相電機驅動器中,主動式PFC通常被公平接受。對于三相系統,無源諧波校正目前更受歡迎,通常涉及三相線路中的50 Hz至60 Hz大電感,或整流器直流側的單個電感。然而,在更高功率下轉向有源PFC具有優勢。有源PFC解決方案(直流或交流側)在電感尺寸、更低的功率損耗、更輕的重量和最佳的功率因數方面提供了最佳解決方案。
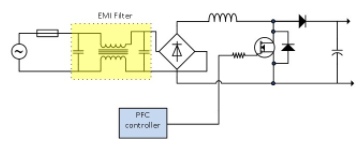
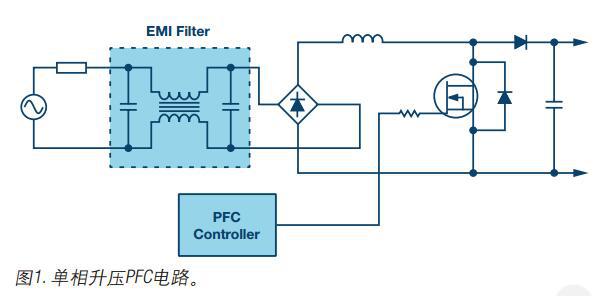
在單相應用中,如低功耗電機驅動器,整流器輸入升壓轉換器(如圖1所示)是默認設置。
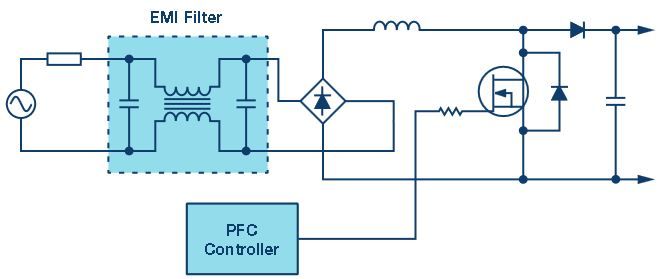
圖1.單相升壓PFC電路。
這些器件的開關頻率通常在50 kHz至100 kHz范圍內,因此需要比無源解決方案小得多的直流側電感。對于三相系統,可以使用涉及交流側或直流側高頻電感器的單開關拓撲。
實施PFC控制的障礙之一是與PFC電路和PFC控制器相關的額外成本。在處理器位于隔離柵的安全超低電壓 (SELV) 側的系統中尤其如此。在這種情況下,由于需要將交流側測量和控制信號與處理器I/O和ADC隔離開來,因此從主電機控制處理器內部實現PFC控制可能會帶來額外的復雜性和成本。此外,從通常經過優化的處理器實現 50 kHz 至 100 kHz PWM 控制,以服務于 10 kHz 至 20 kHz PWM 頻率的電機控制應用可能很難匹配。
在這種情況下,一種選擇是使用廉價的模擬PFC控制器,例如UC3854 [3],并使其完全獨立于主系統控制器運行。但是,通過將ADP1047 [4]等數字PFC控制器與電機控制處理器和數字隔離器結合使用,可以實現附加值。然后,處理器可以將部分排序、監控和保護功能卸載到 PFC 控制器,并以更低的成本增強整個系統功能。這種安排可用于以下方面:
啟動和關斷排序
系統級狀態信息
用戶界面顯示信息
監測異常情況
最大限度降低傳感器要求
備份測量/冗余
作為整體系統故障保護的一部分
控制器優化(通過效率)
典型數字PFC控制器部分的潛在系統監控、保護和排序覆蓋范圍如圖2所示。從系統設計的角度來看,在主處理器的控制和監督下利用ADP1047等器件的集成功能的優勢是顯而易見的。盡管PFC控制器本身可能比模擬控制器更昂貴,但總體系統成本、復雜性和傳感器數量可以降低。
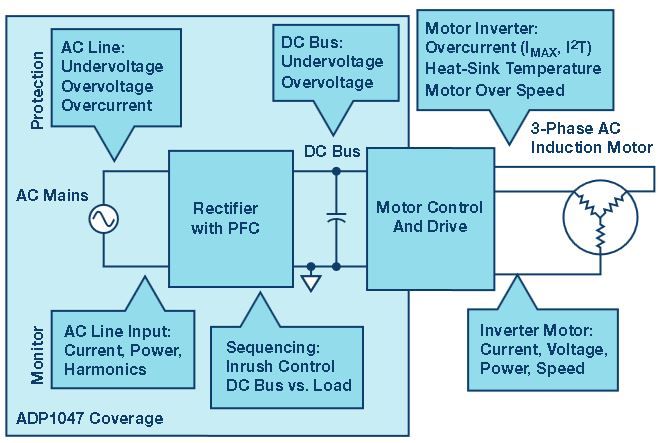
圖2.電機控制系統中的數字 PFC 控制器覆蓋范圍。
硬件平臺
ADI公司提供了一個實驗平臺,用于在實際電機控制系統中驗證其信號鏈組件和軟件工具。該平臺的電路架構如圖3所示,平臺硬件本身如圖4所示。
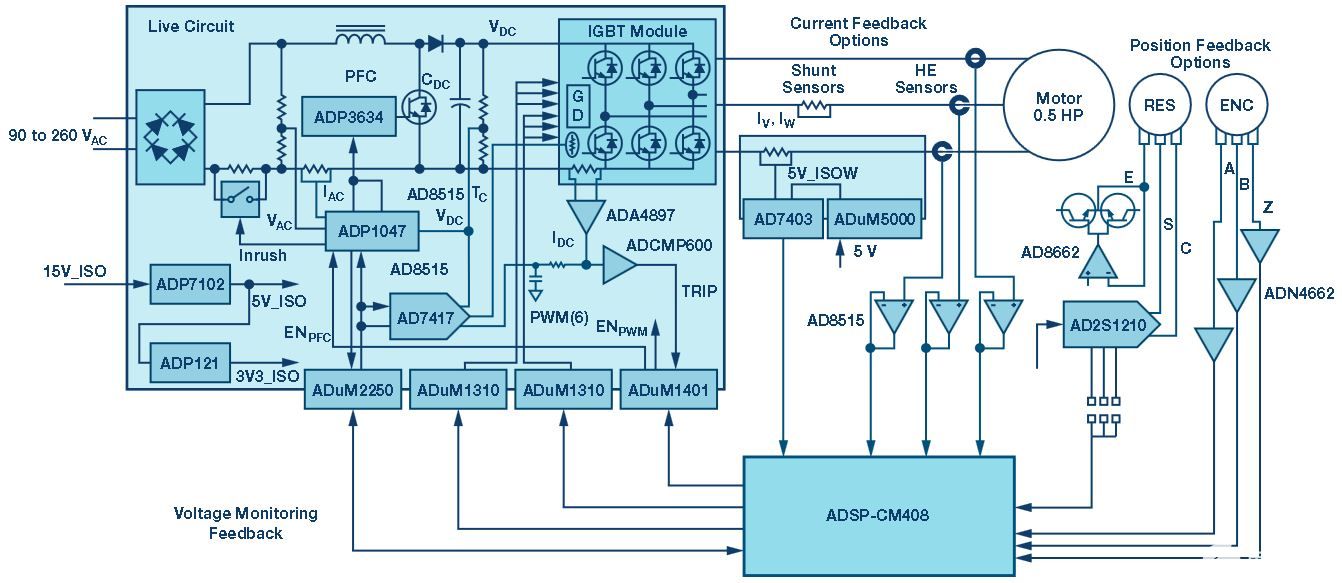
圖3.通用交流輸入電機控制平臺。
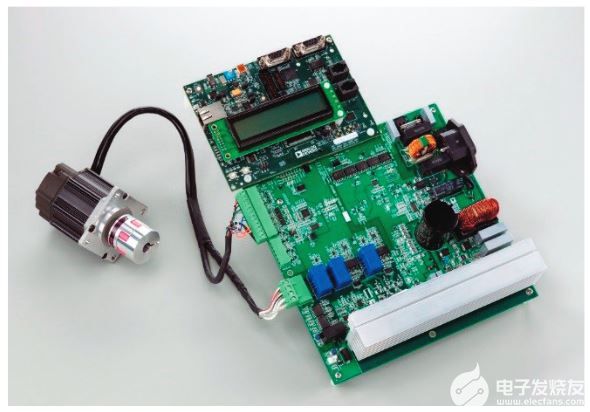
圖4.電機控制平臺硬件。
該系統代表功能齊全的PMSM電源輸入電機驅動器,具有功率因數校正,完全控制,通信信號隔離和光學編碼器反饋。該系統的核心是ADI公司的ARMCortex-M4混合信號控制處理器ADSP-CM408。PFC前端控制由ADP1047執行,具有精確的輸入功率計量功能和浪涌電流控制。ADP1047專為單相PFC應用而設計;ADP1048專為交錯式和無橋PFC應用而設計。數字PFC功能基于傳統的升壓PFC,將輸出電壓反饋與輸入電流和電壓相乘,為AC/DC系統提供最佳的諧波校正和功率因數。所有信號都轉換為數字域,以提供最大的靈活性;所有關鍵參數均可通過PMBus進行報告和調整???接口。ADP1047/ADP1048允許用戶優化系統性能,在整個負載范圍內最大限度地提高效率,并縮短設計上市時間。靈活的數字控制PFC引擎和精確的輸入功率計量相結合,有助于采用智能電源管理系統,這些系統能夠做出決策以提高最終用戶系統效率。該器件通過在輕負載時可編程頻率降低和在輕負載時降低輸出電壓的能力,支持進一步提高效率。ADP1047/ADP1048提供增強的集成特性和功能;浪涌電流和軟啟動控制功能可顯著減少元件數量,并易于優化設計。這些器件專為高可靠性、冗余電源應用而設計,并具有廣泛而強大的保護電路。它們還具有獨立的過壓保護 (OVP) 和過流保護 (OCP)、接地連續性監控和交流檢測。提供內部過熱保護(OTP),可通過外部檢測設備記錄外部溫度。
系統操作
處理器和 PFC 控制器之間的通信通過 I2C/PMBus 接口,帶 I2C數字隔離器提供域之間的接口。如圖 5 所示。處理器位于 SELV 電氣域中,PFC 控制器以高壓域中的直流總線共軌為參考。三相逆變器的柵極驅動器開關信號通過2通道隔離器從處理器PWM模塊路由。I 的數據和時鐘信號2C接口和通用數字信號也通過數字隔離器進行路由。
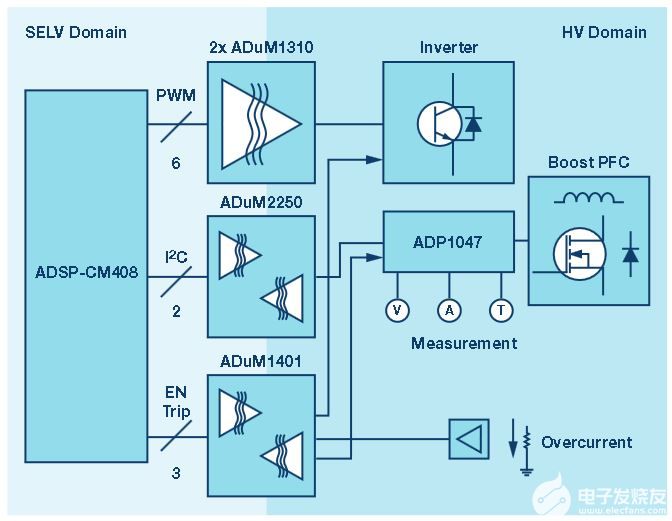
圖5.數字信號隔離。
PFC 控制器管理升壓 PFC 電路的控制和監控。這些任務從主電機控制軟件工作流程卸載到低優先級例程中,如圖6所示。PFC 控制器參數在啟動期間配置。通常可以通過將配置參數寫入控制器IC上的EEPROM存儲器(如果具有此功能)來跳過此步驟。如圖6所示,在典型的電機控制系統中,速度和電流測量以及PWM控制器更新將在高優先級中斷中處理,其中電流測量與PWM信號同步。PFC 控制器可以設置為處理輸入側測量,例如輸入交流線路電壓和電流、直流總線電壓、輸入功率和 PFC 電路溫度。這些測量對于電機控制算法并不重要,無傳感器算法中的直流總線電壓測量可能除外。然而,它們對于整體系統級監控和控制器優化非常重要。因此,可以在低優先級 I 內請求和處理它們2C數據處理任務或中斷例程,并以調度速率與系統監控時間常數相匹配。
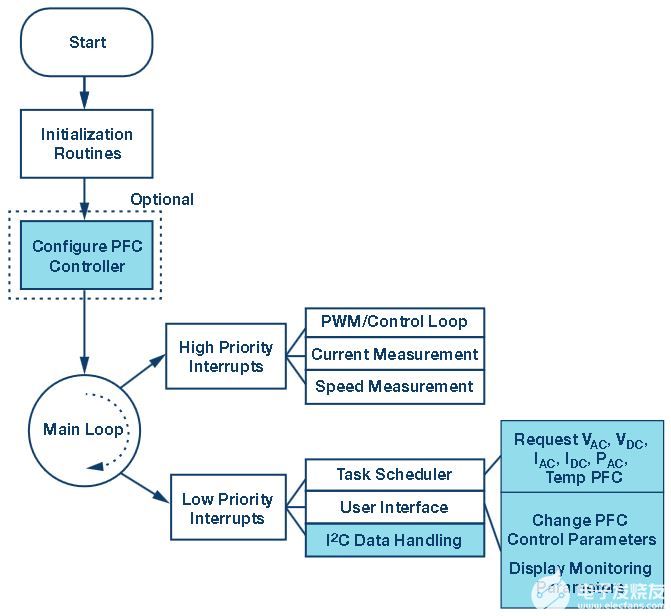
圖6.主電機控制程序結構。
微粒探針?該平臺的用戶界面如圖7所示,其中直流總線基準電壓已設置為250 V。交流和直流側變量的監控與電機控制相結合,清晰可見。

圖7.用戶界面。
結論
隨之而來的處理器上額外傳感器、數字 I/O 和模擬引腳的節省,以及測量變量縮放和解釋的軟件開銷,可能意味著處理器成本的降低,因為能夠選擇性能較低的變體,或者為其他產品釋放處理器硬件和軟件占用空間, 更高優先級或系統增強功能。
在本例中,系統相對于交流線路電壓的啟動時序、直流母線欠壓、過壓和交流側過流保護均由PFC控制器處理。但是,在這方面,在整個系統設計中必須謹慎,因為主控制處理器應始終了解PFC控制器正在采取的控制或保護操作,以便它不會因次要影響而采取獨立操作。一個很好的例子是,由于直流總線上的瞬態過壓,例如電機制動事件,PFC控制器可能會對PWM信號執行全局禁用。如果控制器沒有意識到這一點,它將繼續嘗試調整PWM輸出以保持其工作點,但未成功。如果PFC控制器在過壓瞬變消失后重新啟用PWM,則由于PWM占空比突然大幅增加,系統可能會發展到次級故障。因此,在管理PFC控制器和電機控制處理器之間的保護和排序通信時必須小心。
總之,選擇低成本模擬PFC控制器和更昂貴的數字控制器之間的潛在權衡不僅應根據PFC電路本身進行評估,還應考慮數字控制器更高級功能可以利用的潛在系統級功能、增強功能和成本降低。本文試圖以采用單相電機驅動系統的ADP1047為例,重點介紹其中的一些關鍵系統級增強功能。
審核編輯:郭婷
-
控制器
+關注
關注
114文章
16830瀏覽量
182170 -
電機控制
+關注
關注
3558文章
1933瀏覽量
270513 -
PFC
+關注
關注
47文章
1008瀏覽量
107332
發布評論請先 登錄
相關推薦
數字PFC控制增加了電機控制系統監控的價值
易用的PFC助益電機控制應用
數字PFC控制:實現電機控制系統監控的增值
用于電機控制系統與設計(9)
交流伺服電機在數字控制系統中的應用
基于DSP的感應電機數字控制系統設計
數字PFC控制:實現電機控制系統監控的增值
基于WPF電機控制系統監控軟件

數字PFC控制實現電機控制系統監控的增值

如何為您的電機控制系統增加更多價值






 工商網監
工商網監

評論