

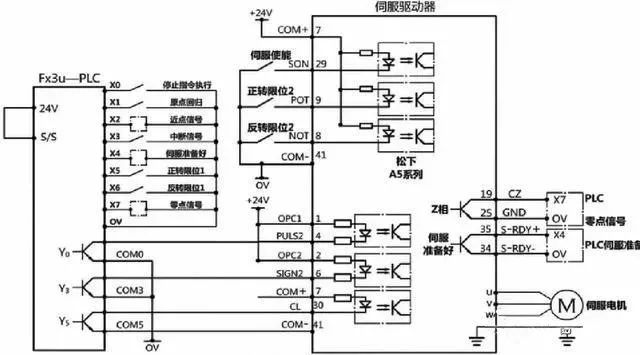
在這里我們使用的是三菱FX—3U的PLC與松下A5的伺服驅動器,我們在PLC上設計了停止指令,遠點回歸,近點信號,中斷信號,以及正反轉限位等。因為我們前面已經給大家介紹過類似這種接線圖,現在就不一一介紹了。
01伺服驅動器參數設置
Pr0.01=0,位置控制方式;
Pr0.00=1,電機旋轉方向設定;
Pr0.05=0,光電耦合輸入(伺服驅動器有兩種方式輸入:一種是光電耦合輸入,一種是差動輸入);
Pr0.06=0,指令脈沖極性設置;
Pr0.07=3,脈沖+方向輸入方式;
Pr0.08=3000,電機每轉1周指令脈沖數;
Pr4.06=3847 ( 00000F07H),設置S17為清零輸入端;
Pr4.11=131586 ( 0002020202H),設置S02為伺服準備好輸出端;
Pr4.00=131586 ( 0002020202H),設置I1為反轉限位2開關輸入端;
Pr4.01=65793 ( 00010101H),設置SI2為正轉限位2開關輸入端;
Pr5.04=0,正反轉限位開關2有效;
Pr5.05=2,正反轉限位順序設置,并清除脈沖偏差計數器為零。
02輸入和輸出信號說明
X0——停止定位指令執行;
X1——開關瞬間接通,可執行原點回歸指令( DSZR);
X2——原點回歸時,近點信號輸入端;
X7——原點回歸時,接收伺服驅動器輸出的編碼器Z相信號輸入端(即零點信號);
Y000——脈沖輸出端;
Y003——電機旋轉方向信號輸出端;
Y005——清零信號輸出端。
03說明
(1)使用X001輸入端啟動DSZR原點回歸指令;
(2)使用M22正轉點動,執行DRVI相對定位指令;
(3)使用M23反轉點動,執行DRVI相對定位指令;
(4)使用M24正轉啟動,執行DRVA絕對定位指令;
(5)使用M25反轉啟動,執行DRVA絕對定位指令;
(6)使用M31啟動,執行ZRN原點回歸指令;
(7)使用M32啟動,執行DVIT中斷定長指令。
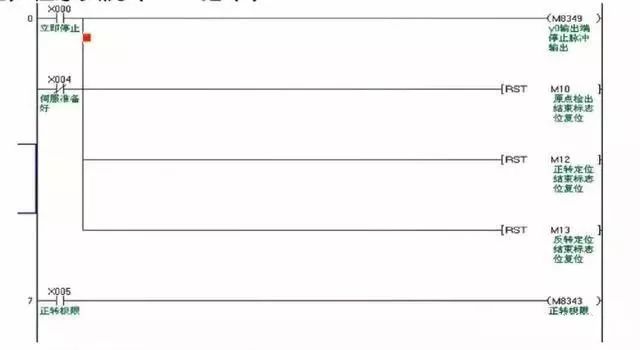
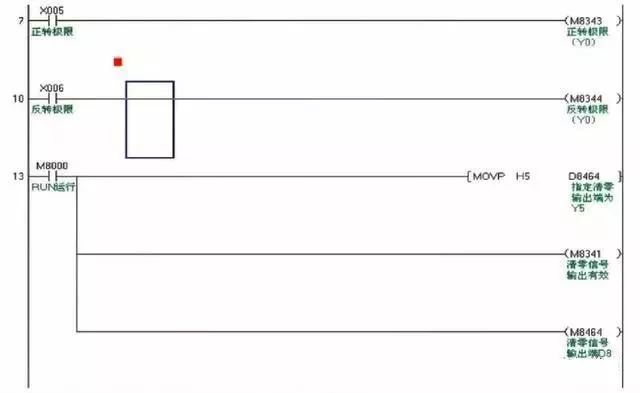
04程序
審核編輯 :李倩
-
plc
+關注
關注
5028文章
13595瀏覽量
470674 -
伺服驅動器
+關注
關注
22文章
503瀏覽量
32293
原文標題:【干貨】PLC的定位指令的使用程序和伺服接線圖,你GET了嗎?
文章出處:【微信號:你身邊的機器人專家,微信公眾號:你身邊的機器人專家】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
三菱PLC伺服控制系統介紹
三菱FX3U/5U PLC無線MODBUS通信方案






 工商網監
工商網監

評論