") 物聯(lián)網(wǎng)邊緣的智能視頻分析
物聯(lián)網(wǎng)邊緣的智能視頻分析
對(duì)數(shù)成像和節(jié)點(diǎn)分析的混合
通過(guò)使用節(jié)點(diǎn)分析和對(duì)數(shù)成像器,可以改進(jìn)在物聯(lián)網(wǎng) (IoT) 中運(yùn)行的視頻分析應(yīng)用程序。出于多種原因,視頻分析應(yīng)用程序試圖利用日常生活中的豐富信息。這些原因的范圍從面部識(shí)別到日常監(jiān)控,但大多數(shù)都集中在預(yù)測(cè)和行為分析上。這些應(yīng)用程序中收集的信息可以通過(guò)云計(jì)算在更高層次上廣泛處理。然而,深度處理有其局限性,可以通過(guò)添加節(jié)點(diǎn)分析和對(duì)數(shù)成像器在許多方面進(jìn)行改進(jìn)。
通過(guò)將節(jié)點(diǎn)分析添加到組合中,可以通過(guò)消除與云的通信來(lái)改進(jìn)數(shù)據(jù)分析。云計(jì)算需要比節(jié)點(diǎn)分析應(yīng)用程序多兩個(gè)甚至三個(gè)數(shù)量級(jí)的帶寬。因此,節(jié)點(diǎn)分析消耗的計(jì)算能力要少得多,延遲也會(huì)減少。人口稠密的市場(chǎng)、混亂的交通路段和城市停車位是一些錯(cuò)綜復(fù)雜的氛圍,可以使用節(jié)點(diǎn)分析進(jìn)行預(yù)測(cè)和行為分析。在云中對(duì)這些環(huán)境進(jìn)行高級(jí)處理可以推進(jìn)業(yè)務(wù)戰(zhàn)略,轉(zhuǎn)移一般交通流量,并提高政府管理的停車位的效率。但是,通過(guò)在傳感器節(jié)點(diǎn)上實(shí)施較低級(jí)別的軟件而不是在云中執(zhí)行分析,可以在這些情況下改善延遲、帶寬、安全性和功耗。
除了節(jié)點(diǎn)的智能之外,將對(duì)數(shù)成像儀添加到組合中可以通過(guò)在傳統(tǒng)成像器不足的領(lǐng)域提供優(yōu)勢(shì)來(lái)增強(qiáng)這些系統(tǒng)。對(duì)數(shù)成像器除了減少對(duì)亮度變化的依賴外,還為圖像處理提供了更高的動(dòng)態(tài)范圍。例如,陰影、反射、光線的突然變化和高對(duì)比度場(chǎng)景是對(duì)數(shù)成像儀可以優(yōu)于傳統(tǒng)成像儀的領(lǐng)域。在視頻應(yīng)用程序中解決這些問(wèn)題可以增強(qiáng)數(shù)據(jù)捕獲,從而加強(qiáng)節(jié)點(diǎn)的分析。通過(guò)改進(jìn)數(shù)據(jù)捕獲,可以顯著改進(jìn)整體視頻分析應(yīng)用程序。
節(jié)點(diǎn)分析和對(duì)數(shù)成像器提供的改進(jìn)可以幫助解決在物聯(lián)網(wǎng)中運(yùn)行的視頻分析應(yīng)用程序的問(wèn)題。物聯(lián)網(wǎng)應(yīng)用常見(jiàn)的一些工程困難是安全性、決策延遲、數(shù)據(jù)帶寬和計(jì)算能力。通過(guò)消除數(shù)據(jù)傳輸,這些工程問(wèn)題大大減少,這就是為什么節(jié)點(diǎn)分析對(duì)物聯(lián)網(wǎng)應(yīng)用具有吸引力的原因。在視頻分析應(yīng)用中,有限的對(duì)比度和對(duì)亮度的依賴是常見(jiàn)的難題。對(duì)數(shù)成像儀幾乎消除了這種掙扎,這是視頻分析應(yīng)用的關(guān)鍵。總體而言,在物聯(lián)網(wǎng)中運(yùn)行的視頻分析應(yīng)用程序通過(guò)節(jié)點(diǎn)分析和對(duì)數(shù)成像器得到了增強(qiáng)。
邊緣智能
通過(guò)根據(jù)預(yù)期的視覺(jué)事件處理數(shù)據(jù),測(cè)量數(shù)據(jù)可以快速轉(zhuǎn)換為適當(dāng)?shù)牟僮鳎苌倩驔](méi)有數(shù)據(jù)傳達(dá)到云服務(wù)器。這種對(duì)視頻數(shù)據(jù)的快速分析,而不是傳輸?shù)皆贫耍梢员镜鼗瘺Q策過(guò)程并改善系統(tǒng)中的延遲。決策中的延遲不僅顯著減少,而且通過(guò)消除通常會(huì)引入攔截風(fēng)險(xiǎn)的數(shù)據(jù)傳輸來(lái)提高安全性。
只有最有價(jià)值的信息需要連接到節(jié)點(diǎn)之外并連接到云中進(jìn)行預(yù)測(cè)或行為處理。這種優(yōu)化的數(shù)據(jù)分區(qū)可最大化云價(jià)值,因?yàn)橥ǔ2恍枰曨l分析幀的完整帶寬。幀與幀之間的大多數(shù)視覺(jué)數(shù)據(jù)在固定安裝的相機(jī)上是靜態(tài)的,可以在節(jié)點(diǎn)上過(guò)濾。邊緣節(jié)點(diǎn)視頻分析可以提供許多過(guò)濾解釋,以區(qū)分預(yù)期的對(duì)象類型:汽車、卡車、自行車、人類、動(dòng)物等。這種抽取減少了數(shù)據(jù)帶寬和相關(guān)計(jì)算能力,否則云服務(wù)器需要這些數(shù)據(jù)帶寬和計(jì)算能力來(lái)分析下游傳輸?shù)囊曨l數(shù)據(jù)的全幀速率。與云計(jì)算應(yīng)用程序相比,帶寬的這種減少可以提高兩到三個(gè)數(shù)量級(jí),這是節(jié)點(diǎn)分析提供的關(guān)鍵改進(jìn)。
對(duì)數(shù)成像
通過(guò)替代對(duì)數(shù)成像來(lái)解決與傳統(tǒng)成像儀相關(guān)的常見(jiàn)問(wèn)題,可以進(jìn)一步改進(jìn)視頻分析應(yīng)用。大多數(shù)傳統(tǒng)成像器都是線性的,并且使用像素來(lái)產(chǎn)生電壓,該電壓是光的線性函數(shù),這可能導(dǎo)致有限的對(duì)比度。線性成像儀還利用均勻的曝光相位,將其動(dòng)態(tài)范圍限制在幀速率內(nèi)的像素曝光時(shí)間。最后,傳統(tǒng)的成像儀對(duì)比度取決于亮度,這可能會(huì)引入與反射相關(guān)的對(duì)比度問(wèn)題。通過(guò)使用產(chǎn)生光對(duì)數(shù)函數(shù)的電壓的像素來(lái)替換對(duì)數(shù)成像器,消除了這些常見(jiàn)問(wèn)題。
一些傳統(tǒng)的成像儀難以應(yīng)對(duì)與對(duì)比度相關(guān)的困難,這些困難阻礙了用戶完全捕獲目標(biāo)環(huán)境。這些對(duì)比度問(wèn)題源于每個(gè)像素內(nèi)電壓產(chǎn)生的線性特性。線性成像像素內(nèi)產(chǎn)生的電壓與撞擊它的光子量成正比;因此,與對(duì)數(shù)對(duì)應(yīng)物相比,動(dòng)態(tài)范圍受到限制。與這些線性成像器相關(guān)的對(duì)比度降低是動(dòng)態(tài)范圍減小的結(jié)果。這種降低的對(duì)比度可能會(huì)破壞物聯(lián)網(wǎng)應(yīng)用中傳感器節(jié)點(diǎn)的分析,最終影響整體系統(tǒng)性能。對(duì)數(shù)成像儀提供更寬范圍的光照水平,因此,由于像素電壓是對(duì)數(shù)產(chǎn)生的,因此增加了對(duì)比度。然而,這種增加的對(duì)比度導(dǎo)致對(duì)光的敏感性更高,這在某些應(yīng)用中可能是不希望的效果。或者,這種對(duì)亮度的敏感性增加可能是一個(gè)優(yōu)勢(shì)——這完全取決于應(yīng)用。
在陽(yáng)光明媚或明亮的環(huán)境中,使用傳統(tǒng)成像儀拍攝的視頻可能會(huì)受到反射的進(jìn)一步阻礙。例如,當(dāng)擋風(fēng)玻璃上存在反射時(shí),車輛中的面部識(shí)別會(huì)變得越來(lái)越困難。這種視頻捕獲的障礙可能會(huì)在系統(tǒng)中引入錯(cuò)誤或丟失關(guān)鍵數(shù)據(jù),從而對(duì)視頻分析產(chǎn)生負(fù)面影響。引入這些反射是因?yàn)橄袼刂g的線性成像儀對(duì)比度取決于亮度;因此,反射更加突出。這種對(duì)光度的依賴性可以在公式1中觀察到。或者,對(duì)數(shù)成像儀對(duì)比度與亮度無(wú)關(guān),因?yàn)樗哂凶匀坏膶?duì)數(shù)特性,有助于減輕反射或光線的突然變化。對(duì)數(shù)成像器的光度獨(dú)立性可以通過(guò)公式2來(lái)觀察。


超越單個(gè)組件
ADI公司超越了單個(gè)組件,以提供平臺(tái)級(jí)解決方案;這些解決方案可幫助客戶快速部署經(jīng)過(guò)驗(yàn)證的智能解決方案,以更低的系統(tǒng)成本提高性能。智能應(yīng)用始于可靠、準(zhǔn)確的數(shù)據(jù),這些數(shù)據(jù)由ADI先進(jìn)的檢測(cè)和測(cè)量功能實(shí)現(xiàn)。此外,ADI公司正在與客戶合作開發(fā)獨(dú)特的系統(tǒng)級(jí)解決方案,以解決整個(gè)問(wèn)題。ADIS1700x是其中一種能夠進(jìn)行四分之一視頻圖形陣列(QVGA)成像分析的解決方案。
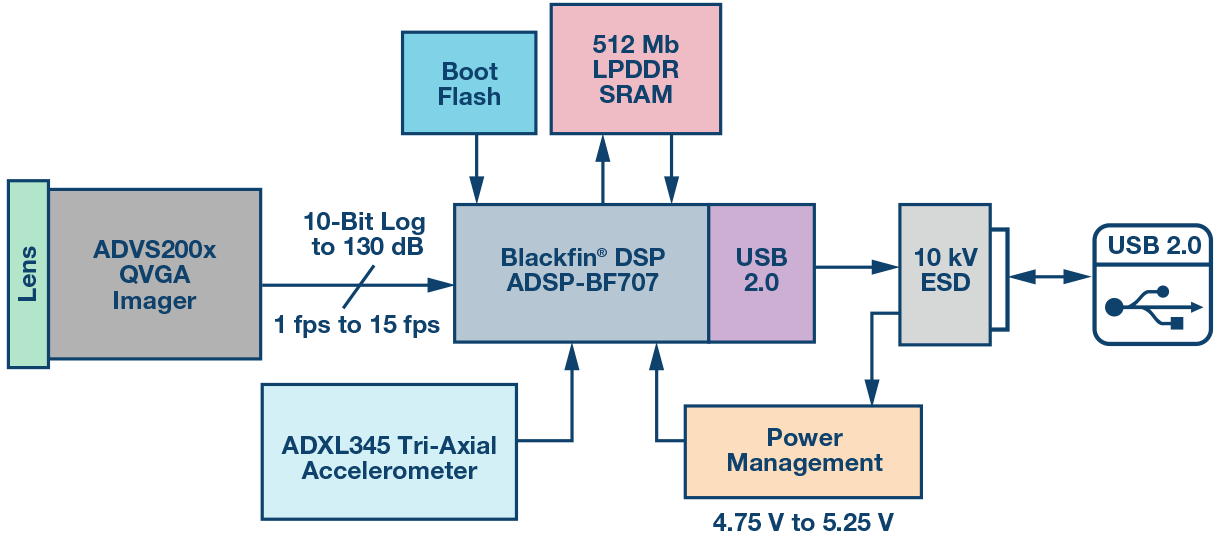
圖4.功能框圖。
ADIS1700x是一款QVGA分析成像器模塊,外形小巧,具有對(duì)數(shù)靈敏度,結(jié)合數(shù)字信號(hào)處理功能,可優(yōu)化視頻性能。該模塊利用低功耗Blackfin處理器提供在節(jié)點(diǎn)上執(zhí)行分析的能力,以及用于圖像穩(wěn)定、傾斜和沖擊檢測(cè)的加速度計(jì)。它還利用內(nèi)置的邊緣檢測(cè)來(lái)跟蹤和計(jì)數(shù)物體運(yùn)動(dòng)。與傳統(tǒng)成像儀不同,每個(gè) 14 μm × 14 μm 像素具有獨(dú)特的曝光相位。用于戶外操作的保形涂層使其成為大規(guī)模部署的完美模塊,允許創(chuàng)建新興的智能城市和建筑應(yīng)用。ADIS17001提供110°視場(chǎng)(FOV)鏡頭,而ADIS17002提供67°視場(chǎng)(FOV)鏡頭。這兩個(gè)選項(xiàng)提供了多種目標(biāo)應(yīng)用,包括停車位監(jiān)控、停車違規(guī)執(zhí)法、交通隊(duì)列檢測(cè)和工業(yè)分析。
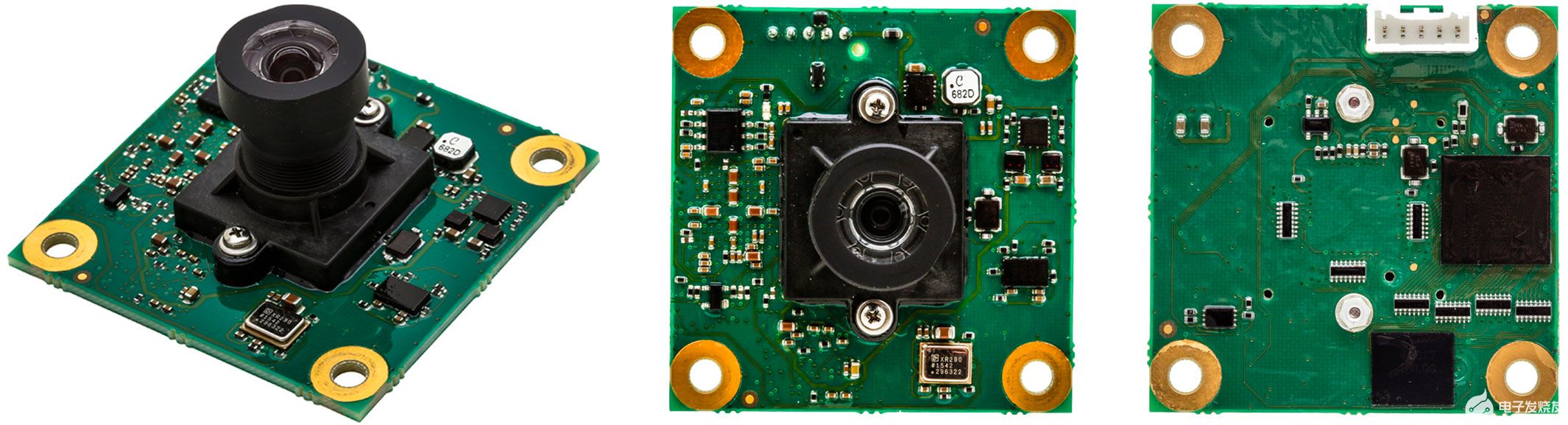
圖5.ADIS17002的角度(左),電路板的鏡頭側(cè)上方(中)和背面(右)。
總體而言,通過(guò)節(jié)點(diǎn)分析和對(duì)數(shù)成像器可以顯著改善物聯(lián)網(wǎng)中的視頻應(yīng)用,這是ADI公司在發(fā)布ADIS1700x時(shí)采用的方法。節(jié)點(diǎn)分析,而不是云計(jì)算,可以使物聯(lián)網(wǎng)應(yīng)用程序向前發(fā)展。對(duì)數(shù)成像儀具有同類產(chǎn)品無(wú)法比擬的優(yōu)勢(shì),進(jìn)一步改善了物聯(lián)網(wǎng)應(yīng)用。總之,在物聯(lián)網(wǎng)中運(yùn)行的視頻分析應(yīng)用程序與節(jié)點(diǎn)分析和對(duì)數(shù)成像儀相結(jié)合,構(gòu)成了一個(gè)強(qiáng)大的系統(tǒng)級(jí)解決方案。
審核編輯:郭婷
-
傳感器
+關(guān)注
關(guān)注
2551文章
51134瀏覽量
753842 -
物聯(lián)網(wǎng)
+關(guān)注
關(guān)注
2909文章
44671瀏覽量
373634
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
有方科技助力物聯(lián)網(wǎng)邊緣計(jì)算產(chǎn)業(yè)發(fā)展
物聯(lián)網(wǎng)邊緣計(jì)算的概念
邊緣計(jì)算在物聯(lián)網(wǎng)中的作用
IOT邊緣計(jì)算網(wǎng)關(guān):物聯(lián)網(wǎng)的“神經(jīng)系統(tǒng)”

如何使物聯(lián)網(wǎng)邊緣設(shè)備高效節(jié)能?
邊緣計(jì)算物聯(lián)網(wǎng)平臺(tái)是什么
什么是物聯(lián)網(wǎng)技術(shù)?
邊緣計(jì)算物聯(lián)網(wǎng)關(guān)如何優(yōu)化數(shù)據(jù)處理流程

邊緣計(jì)算物聯(lián)網(wǎng)網(wǎng)關(guān)

物聯(lián)網(wǎng)云平臺(tái)是什么
網(wǎng)關(guān)助力邊緣物聯(lián)網(wǎng)

宜聯(lián)IOT中繼平臺(tái)與傳統(tǒng)物聯(lián)網(wǎng)平臺(tái)項(xiàng)目應(yīng)用分析比較
邊緣計(jì)算智能網(wǎng)關(guān)為物聯(lián)網(wǎng)設(shè)備高效通信賦能
智能邊緣網(wǎng)關(guān)的功能有哪些?
智慧社區(qū)建設(shè)中應(yīng)用AI邊緣智能分析設(shè)備、邊緣設(shè)備可以解決哪些問(wèn)題?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論