 基于遞推算術平均算法的帶阻平滑濾波器設計
基于遞推算術平均算法的帶阻平滑濾波器設計
信號采集是非常常見的需求,我們也總是希望采集到的數據是純凈而真實的,但這只是我們的希望。環境中存在太多的干擾信號,為了讓我們得到的數據盡可能地接近實際值,我們需要降低這些干擾信號的影響,于是就有了濾波器的用武之地。這里我們討論的主要是軟件實現的數字濾波器,這一篇我們就來討論基于遞推算術平均算法的帶阻平滑濾波器。
1 、問題的提出
我們已經實現了基于算術平均的遞推算術平均濾波器。雖然它對周期性干擾和高頻的干擾都有一定的效果,但是對于這種濾波器其靈敏度和濾波效果很難同時達到較好的效果。一般來說,當N值較小時,靈敏度會增高但濾波效果則不太理想;當N值較大時,濾波效果會比較好,但靈敏度會受到影響。所以我們希望能找到一種方法,讓靈敏度和濾波效果都能有較好的表現。
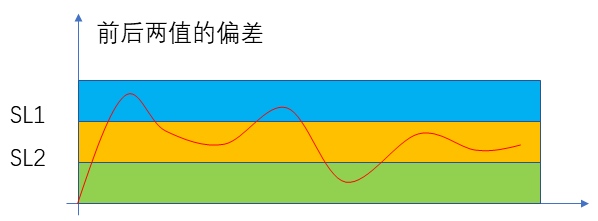
關于這個問題,我們先來分析一下。一般來說,不管是周期性干擾還是噪聲干擾都是在一定的范圍內對數據造成影響。不會出現很大幅度的數據差異。基于這一點我們可以考慮對比本次采集與上次輸出之間的偏差值,如果偏差值大于一定的限值則我們認為是數據發生了較大變化,遠大于干擾造成的影響,干擾可以忽略,所以我們直接對數據進行更新。當數據偏差處于一定的變化范圍之內時,我們認為是處于穩定的范圍內,這時干擾造成的影響于數據的變化不能忽略,我們需要采用濾波。具體如圖所示:
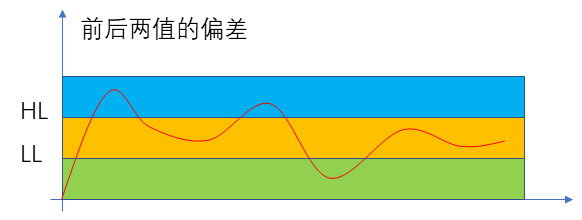
其中HL和LL就是我們之間的范圍就是可能干擾不能忽略的范圍;而大于HL的部分我們認為采集數據變化遠超干擾的影響,忽略干擾提高靈敏度;而小于LL的部分說明干擾造成的影響很小,在允許的誤差范圍之內或者說在數據的正常波動范圍之內,我們也不需要濾波。
我們在數據的變化大于干擾所能引起的數據差異時,選擇不濾波而是快速更新數據以提高靈敏度。可是如果有一個偶然的脈沖干擾出現時,這種操作方式則會導致系統失效,所以我們必須引入消抖操作。當連續出現多個值都是大范圍變化時,我們認為是數據的正常變化,否則我們認為是偶然的脈沖干擾造成的。
2 、算法設計
我們已經描述了在不同的偏差區間對采集數據采取不同處理方式的辦法。具體怎么設計這一濾波算法呢?首先我們需要根據經驗或者基于對被控對象的判斷來確定HL和LL的范圍,這樣在不同范圍內采取不同的處理方式的做法才能達到良好的效果。
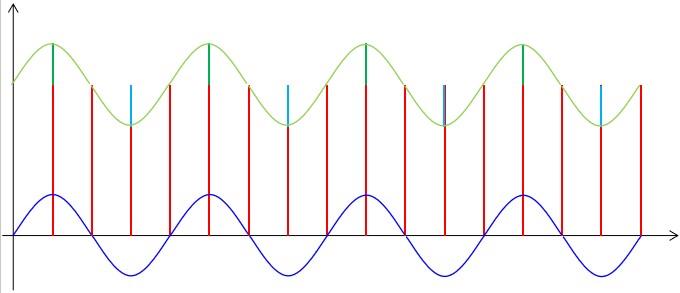
我們先來看偏差處于HL和LL之間時該怎么處理。同樣需要定義一個長度為N的數據隊列。和前一篇中所說的一樣,當采集到一個新的數據時,用這個新的數據替換掉最老的數據。并且將數據指針指向下一次需要替換掉的最老數據。然后使用隊列中的數據去算術平均值而得到最新的輸出數據,具體隊列如下:
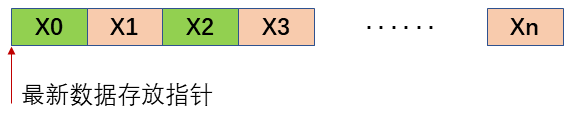
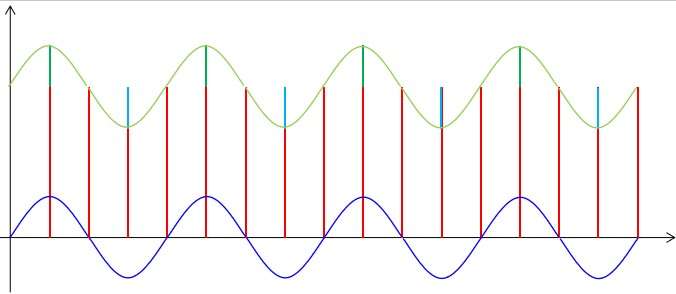
若是偏差落在大于HL和小于LL的范圍內,則不需要濾波,該如何處理呢?我們一樣需要數據隊列,因為數據隨時有可能回歸到需要濾波的范圍,我們必須每次的更新數據隊列即使沒有濾波需求。這時的更新數據方式不同,我們將整個隊列的數據都替換為新數據,但我們不更新數據指針。輸出數據就是本次采集的數據,具體的數據隊列如下:

但是偏差落在大于HL和小于LL的范圍內并不能直接更新數據隊列的全部數據,因為可能是偶然性的脈沖干擾,我們需要作消抖處理。我們判斷如果連續多少個的采集數據均落在相應的區間,我們就認為不是偶然的脈沖干擾。這是我們就更新隊列的全部數據。
3 、代碼實現
我們已經設計了帶阻區間濾波的相關算法,接下來我們來考慮如何實現這一濾波器。同樣的,我們需要定義一個濾波器對象然后基于這一對象實現相應的濾波器操作。
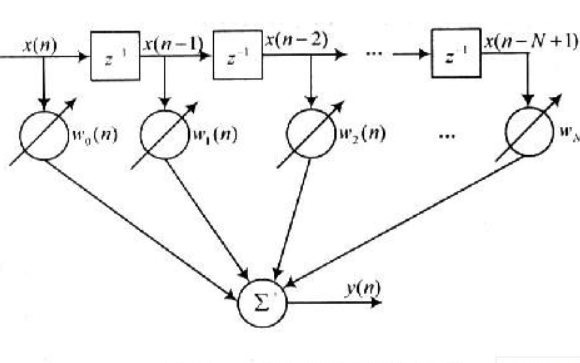
我們先來分析一下,首先濾波器對象需要獲取當前采集到的數據值;同時我們為了實現對N個數據的遞推平均就需要有一個存儲這N個數的隊列;我們需要記錄最新的數據硬件存儲到哪個位置就需要一個位置指針;同時我們也需要知道N的大小,所以我們將它們都定義濾波器對象的屬性。平滑濾波的過程必須要計算算術平均值,而遞推算術平均則是在每次采集一個數據之時都計算平均值,可是如果N值較大時,就會存在大量的重復計算。我們考慮到上一次采樣的平均值已經得到,我們將其記錄下來的話就可以用最新采集的數據替換掉最老的數據,從而得到新的平均值,所以我們將上一時間的輸出值記錄下來作為對象的一個屬性。除此之外,我們還需要知道濾波器的限制區間,即HL和LL,所以我們將采集數據所對應的量程范圍、上限(HL)、下限(LL)比例均作為對象的屬性。同時為了實現消抖,我們需要記錄數據大幅變化的持續數及確認消抖的最大數值,這兩個也作為對象的屬性。根據以上分析我們可定義濾波器對象類型為:
1 /*定義平滑濾波對象類型*/
2 typedef struct FilterObject{
3 float newValue; //最新測量值
4 float lastValue; //上一個輸出值
5 float *buffer; //數據緩存區
6 int16_t position; //寫操作位置指針
7 uint16_t bufCount; //濾波的數量
8 uint16_t delayCount; //延遲計數
9 uint16_t delayLimit; //延遲限值
10 float rangeLimit; //量程范圍
11 float upperRario; //比例下限
12 float lowerRatio; //比例下限
13 }FilterObjectType;
我們已經獲得了濾波器對象,接下來將基于這一對象實現相應的濾波器功能。我們要對比當前的采集值與上一個輸出值的比較,根據它們的偏差絕對值來決定采取怎樣的處理方式。處理流程如下:
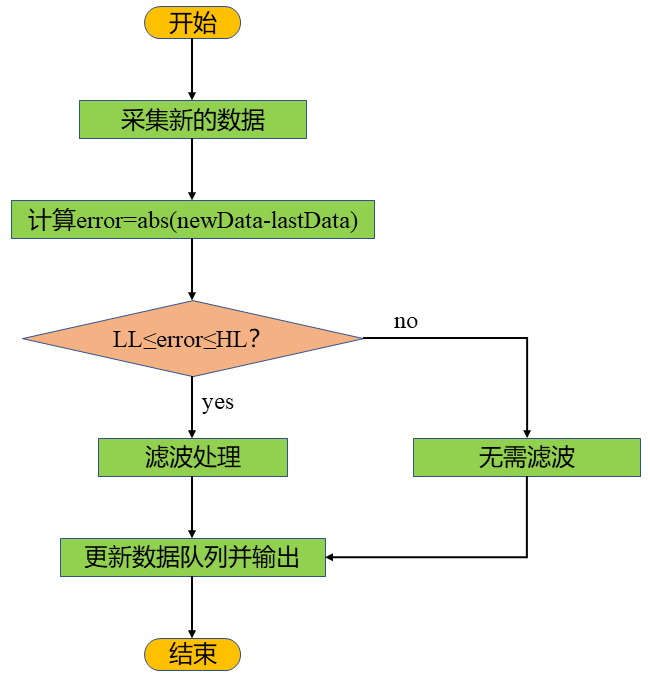
我們通過判斷新值與前一個值的偏差來決定所要進行的操作,當偏差處于HL和LL之間時做濾波處理,否則不做濾波處理。根據以上的分析及流程圖我們可以設計帶阻平滑濾波器的代碼為:
1 /* 帶阻平滑濾波器,對指定區間濾波,返回濾波后的值*/
2 float BandSmoothingFilter(FilterObjectType *filter)
3 {
4 float result=filter->lastValue;
5
6 if(filter->position<0)
7 {
8 for(int i=0;i<filter->bufCount;i++)
9 {
10 filter->buffer[i]=filter->newValue;
11 }
12 filter->position=0;
13 filter->lastValue=filter->newValue;
14 }
15
16 if(filter->position>=filter->bufCount)
17 {
18 filter->position=0;
19 }
20
21 if(fabs(filter->newValue-filter->lastValue)>(filter->rangeLimit*filter->upperRario/100))
22 {
23 filter->delayCount+=1;
24 if(filter->delayCount>=filter->delayLimit)
25 {
26 for(int i=0;i<filter->bufCount;i++)
27 {
28 filter->buffer[i]=filter->newValue;
29 }
30 filter->position++;
31 result=filter->newValue;
32 filter->delayCount=0;
33 }
34 }
35 else if(fabs(filter->newValue-filter->lastValue)>=(filter->rangeLimit*filter->lowerRatio/100))
36 {
37 result=filter->lastValue-filter->buffer[filter->position]/filter->bufCount;
38
39 result=result+filter->newValue/filter->bufCount;
40
41 filter->buffer[filter->position++]=filter->newValue;
42
43 filter->delayCount=0;
44 }
45 else
46 {
47 filter->delayCount+=1;
48 if(filter->delayCount>=filter->delayLimit)
49 {
50 for(int i=0;i<filter->bufCount;i++)
51 {
52 filter->buffer[i]=filter->newValue;
53 }
54 filter->position++;
55 result=filter->newValue;
56 filter->delayCount=0;
57 }
58 }
59 filter->lastValue=result;
60 filter->newValue=0.0;
61 return result;
62 }
4 、應用總結
我們實現了基于算術平均的帶阻平滑濾波器。該濾波器對周期性干擾和小幅的噪聲干擾均有較好的效果。而且通過區間濾波,在數據快速變化時也提高了系統的靈敏度。對于干擾對數據的影響處于一定范圍內的系統有很好的效果。
這一濾波器有效的前提是基于干擾的幅度并不是很大的前提而實現的。如果系統存在較大幅度的脈沖干擾,在這種脈沖干擾的出現頻率較低時,消抖操作能夠很好的去除這種偶然性干擾。但如果出現持續性的高頻大幅脈沖干擾,這一濾波器將變得無能為力。
對于限值區間HL和LL的取值一般只能根據采集系統的特點或者工程師的經驗來判斷,這個取值決定了濾波器的濾波效果。
-
濾波器
+關注
關注
161文章
7845瀏覽量
178389 -
數字濾波器
+關注
關注
4文章
270瀏覽量
47046 -
算法設計
+關注
關注
0文章
24瀏覽量
8169
發布評論請先 登錄
相關推薦
基于遞推算術平均算法的階進平滑濾波器設計
基于算術平均算法的中值數字濾波器設計
基于算術平均算法的限幅濾波器設計
十一種通用濾波算法(一)
十一個經典的濾波算法的介紹和示例程序詳細資料免費下載
單片機有哪些常用濾波算法詳細資料說明





 工商網監
工商網監
評論