") 3D視覺的進步--軟件改善箱中取物
3D視覺的進步--軟件改善箱中取物
3D視覺的進步--軟件改善箱中取物
無序的箱中取物難以執(zhí)行是由于每個目標物體都被任意且毫無章法地放置在容器中。
有序的箱中取物,即每個目標物體都按規(guī)則且可預(yù)測的模式排列。
半有序的箱中取物對于機器人而言較為困難,因為僅可預(yù)見部分目標物體的位置。
作為制造業(yè)自動化過程中的關(guān)鍵組成部分,工業(yè)機器人的數(shù)量在全球范圍內(nèi)逐年遞增。以美國為例,2017年的數(shù)量是每10000個員工中有200個機器人,全球排名第七。韓國位居第一,機器人數(shù)量是710,其次是新加坡,數(shù)量是658。
許多工業(yè)生產(chǎn)過程如今都實現(xiàn)了自動化,而這在幾年前還是不可想象的。在工業(yè)自動化需克服的眾多難題中,極主要的問題之一便是視覺引導(dǎo)的機器人技術(shù),尤其是箱中取物領(lǐng)域,它涉及到機器人對箱中任意擺放物體的選擇與拾取。機器人在取物后要對物體做些什么取決于具體的應(yīng)用領(lǐng)域。有時機器人取物后的投放位置和定位無關(guān)緊要,它在取物后僅需將物體放入另一容器中或傳送帶上,比如非托盤化運輸?shù)膽?yīng)用領(lǐng)域。
在其他領(lǐng)域中,機器人需要以規(guī)定的方式放置所拾取的物體。這種取放方式涉及的應(yīng)用領(lǐng)域包括零件的自動化組裝或后加工處理,其中可能涉及到檢測系統(tǒng),物體被拾取后可能會檢測為不良品。這種方式使得整個自動化過程的效率得到更優(yōu)化。
1
拾取信封屬于對選取物體的放置位置無要求(pick and drop)的應(yīng)用,在這種情況下放置的位置和定位無關(guān)緊要。機器人只需將信封放在傳送帶上即可。

2
在對選取物體的放置位置有要求(pick and place)的應(yīng)用領(lǐng)域中,機器人拾取目標物體后定向地將其放置在確切的位置。
箱中取物的另一分類方法是基于目標物體被拾取之前在箱中的排列方式。根據(jù)此分類,箱中取物可分為三種類型:有序化、半有序化和無序化取物。
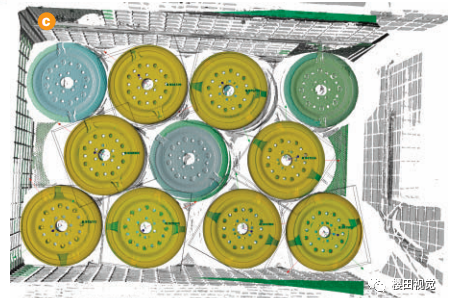
有序化箱中取物是較簡單直接的機械化應(yīng)用。每個目標物體都按有序且可預(yù)測的模式排列,因此機器人可以輕而易舉地拾取目標物體。例如在如下場景中,箱中的瓶子有序排列,瓶蓋朝上讓機器人可以輕松地拾取到。雖然需要花費額外的時間將瓶子有序地放置在箱中,但是每個物體之間的取放時間整體得到了縮減。
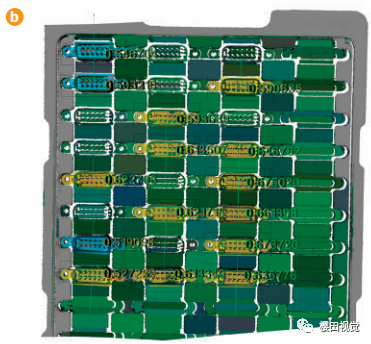
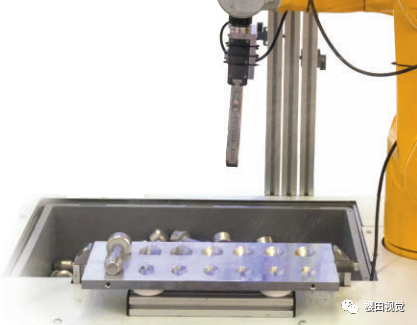
半有序化的箱中取物涉及的應(yīng)用領(lǐng)域包括部分目標物體有序排列的情況。這給機器人對目標物體的定位和拾取增加了難度。比如拾取成堆放置的部件,如用于熱加工成型的金屬板。每個物體的拾取時間取決于具體的應(yīng)用領(lǐng)域以及排放的難度。
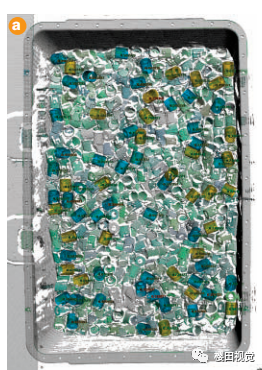
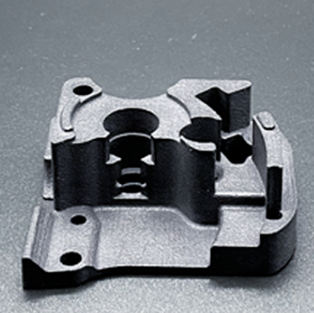
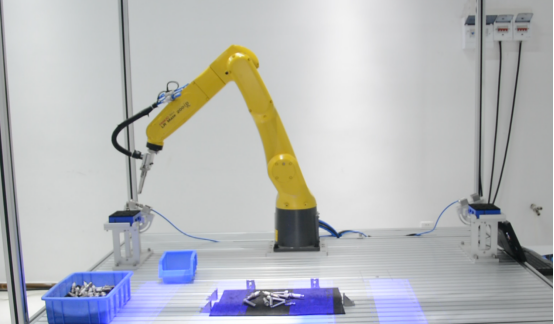
對于無序化箱中取物而言,箱中每個目標物體的位置都是完全隨機且不可預(yù)測的。比如,無序化箱中取物適用于裝滿隨意放置的小型金屬配件的容器,這些小型金屬配件需要被一個一個地拾取。這些配件可能疊放或纏在一起,從而進一步加大了定位和后續(xù)拾取的難度。這一類分揀是較先進的,它將箱中取物帶入了一個新的領(lǐng)域。同時它也取決于機器視覺和抓取技術(shù)的先進程度。
審核編輯 :李倩
-
自動化
+關(guān)注
關(guān)注
29文章
5598瀏覽量
79443 -
3D視覺
+關(guān)注
關(guān)注
4文章
434瀏覽量
27558
原文標題:3D視覺的進步--軟件改善箱中取物
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
物聯(lián)網(wǎng)行業(yè)中的模具定制方案_3D打印材料選型分享
3D視覺技術(shù)廣闊的應(yīng)用前景
裸眼3D筆記本電腦——先進的光場裸眼3D技術(shù)
OpenCV攜奧比中光3D相機亮相CVPR 2024
蘇州吳中區(qū)多色PCB板元器件3D視覺檢測技術(shù)

英倫科技裸眼3D平板電腦:革新視覺體驗,重塑價格優(yōu)勢

除了令人驚嘆的裸眼3D顯示技術(shù),英倫科技裸眼3D視覺訓(xùn)練一體機還具備哪些特點?
奧比中光英偉達聯(lián)辦3D視覺創(chuàng)新應(yīng)用競賽圓滿收官
科技元宇宙,裸眼3D視覺訓(xùn)練一體機——您的視力改善專家

奧比中光攜多款3D相機深度參與國內(nèi)3D視覺最高規(guī)格會議

解決方案|基于3D視覺技術(shù)的鋁合金板件刷油烘干自動化上下料
工業(yè)自動化,3D視覺在五金件上下料中的應(yīng)用

高分工作!Uni3D:3D基礎(chǔ)大模型,刷新多個SOTA!

3D視覺引導(dǎo)3C薄片自動化上料

技術(shù)基因+自主創(chuàng)新,光鑒科技塑造3D視覺感知新范式






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論