") 在OpenCV4.5.4版本上完成YOLOv5 7.0推理演示與測試
在OpenCV4.5.4版本上完成YOLOv5 7.0推理演示與測試
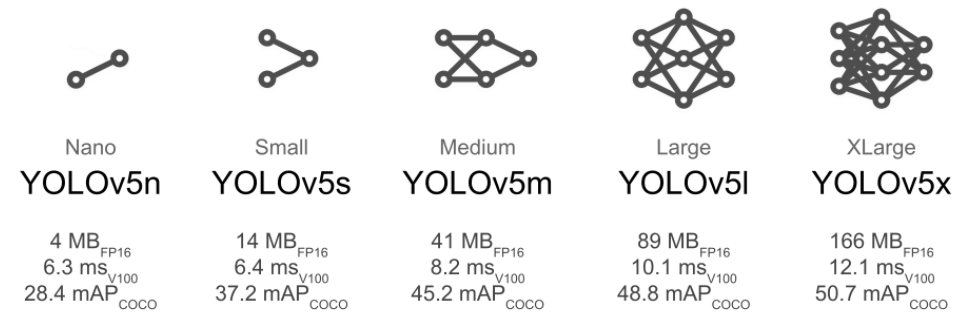
昨天發(fā)了YOLOv5 7.0支持實例分割的推文,收到不少留言問推理速度怎么樣,所以我今天測試了一下,選擇的是YOLOv5s的SEG模型,導(dǎo)出ONNX格式之后,在OpenCV4.5.4版本上完成了推理演示與測試。
ONNX格式輸入與輸出
首先需要把yolov5s-seg.pt文件導(dǎo)出為ONNX格式,這個很簡單,一條命令行搞定:
python export.py --weights yolov5s-seg.pt --include onnx
運行結(jié)果如下:
導(dǎo)出之后查看輸入與輸出格式顯示如下:
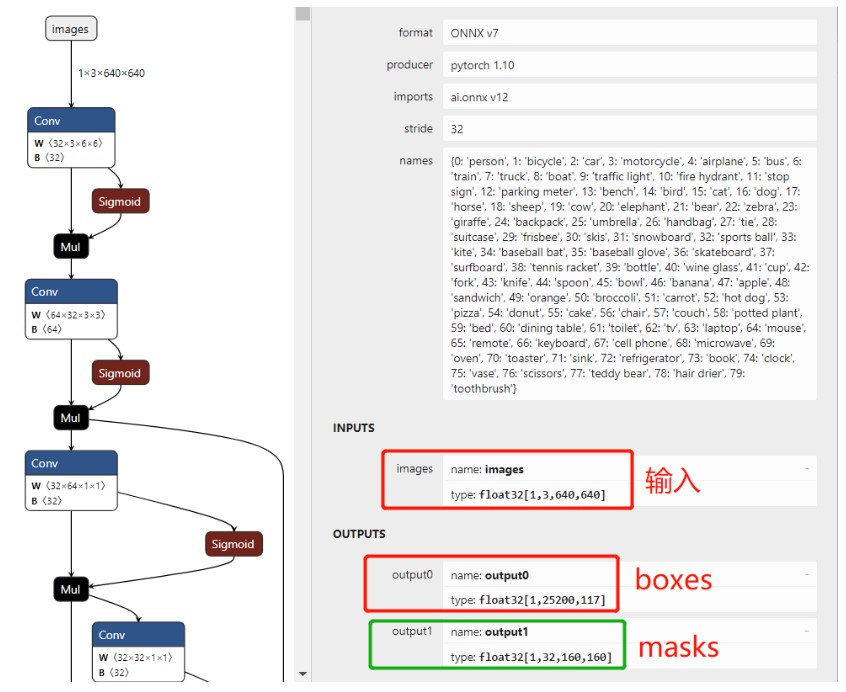
其中輸入部分跟YOLOv5對象檢測沒有什么分別,都是NCHW格式圖像輸入,甚至預(yù)處理都完全一致。
輸出部分內(nèi)容分為兩個部分,output0主要是box框架信息,跟mask預(yù)測的1x32個向量,前面85個解析跟YOLOv5對象檢測完成一致,后面32向量是解析mask的時候會使用的。
output1格式是1x32x160x160, 針對每個box通過boxes部分的1x32 跟它點乘機得到1x160x160 就得到這個box對應(yīng)的預(yù)測mask信息,然后根據(jù)box大小從mask中截取roi之后,疊加到輸出結(jié)果上就可以了。
OpenCV DNN推理
整個代碼實現(xiàn)部分絕大部分跟OpenCV DNN部署YOLOv5對象檢測一致,需要修改的只有兩個地方,一個是推理時候的預(yù)測結(jié)果,YOLOv5返回一個,這邊是返回兩個,所以需要修改一下代碼把代碼從:
defdetect(image,net): #1x3x640x640 blob=cv2.dnn.blobFromImage(image,1/255.0,(INPUT_WIDTH,INPUT_HEIGHT),swapRB=True,crop=False) net.setInput(blob) preds=net.forward() returnpreds
修改為:
defdetect(image,net): rgb=cv.cvtColor(image,cv.COLOR_BGR2RGB) input_image=cv.resize(src=rgb,dsize=(INPUT_WIDTH,INPUT_HEIGHT)) blob_img=np.float32(input_image)/255.0 input_x=blob_img.transpose((2,0,1)) input_blob=np.expand_dims(input_x,0) net.setInput(input_blob) layer=net.getUnconnectedOutLayersNames() masks,preds=net.forward(layer) returnpreds,masks這樣就好啦 第二個改動的地方在后處理部分,如何解析出mask部分,這部分我通過翻看YOLOv5 7.0官方推理演示的源碼,它是基于torch實現(xiàn)的,我一通猛改之后改成了基于numpy實現(xiàn)。生成mask的代碼如下:
color_mask=np.zeros((fh,fw,3),dtype=np.uint8) black_mask=np.zeros((fh,fw),dtype=np.float32) mv=cv.split(color_mask) foriinrange(len(boxes)): x1,y1,x2,y2=boxes[i] x1=max(0,x1) y1=max(0,y1) classid=class_ids[i] m1=masks[i] mask=np.reshape(sigmoid(np.matmul(m1,mask2)),(160,160)) mx1=max(0,np.int((x1*sx)/x_factor)) mx2=max(0,np.int((x2*sx)/x_factor)) my1=max(0,np.int((y1*sy)/y_factor)) my2=max(0,np.int((y2*sy)/y_factor)) mask_roi=mask[my1:my2,mx1:mx2] result_mask=cv.resize(mask_roi,(x2-x1,y2-y1)) result_mask[result_mask>0.5]=1.0 result_mask[result_mask<=?0.5]?=?0.0 ????rh,?rw?=?result_mask.shape ????if?(y1+rh)?>=fh: rh=fh-y1 if(x1+rw)>=fw: rw=fw-x1 black_mask[y1:y1+rh,x1:x1+rw]=result_mask[0:rh,0:rw] mv[2][black_mask==1],mv[1][black_mask==1],mv[0][black_mask==1]= [np.random.randint(0,256),np.random.randint(0,256),np.random.randint(0,256)] color=colors[int(classid)%len(colors)] cv.rectangle(frame,(x1,y1),(x2,y2),color,2) cv.rectangle(frame,(x1,y1-20),(x2,y1),color,-1) cv.putText(frame,class_list[classid],(x1,y1-10),cv.FONT_HERSHEY_SIMPLEX,.5,(0,0,0))
把這段代碼放在NMS之后,替換YOLOv5對象檢測的NMS之后的解析代碼即可。最終Python版本OpenCV DNN推理的運行效果如下:
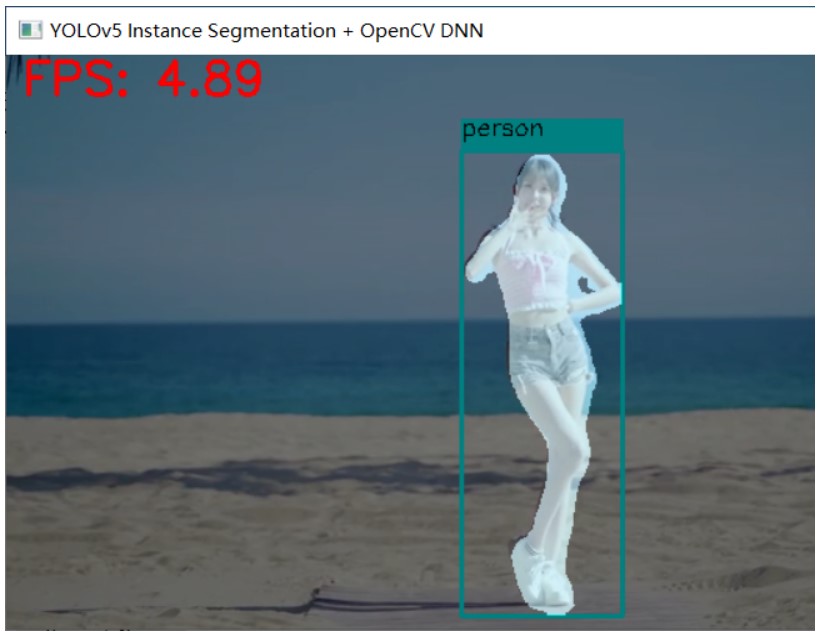
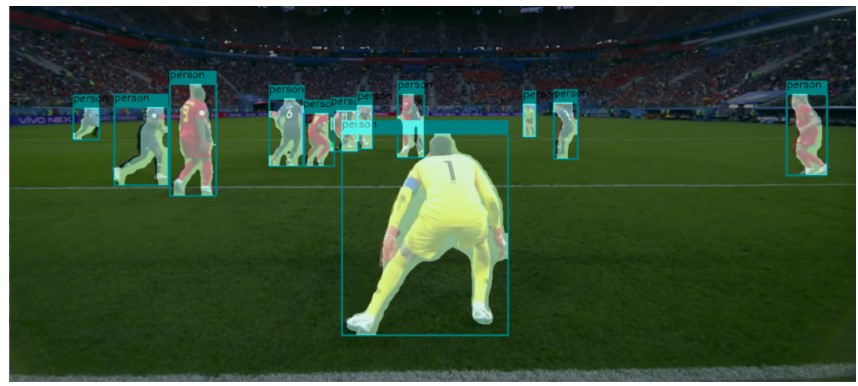
速度這么慢,怒而改成OpenCV DNN C++推理,N卡加持: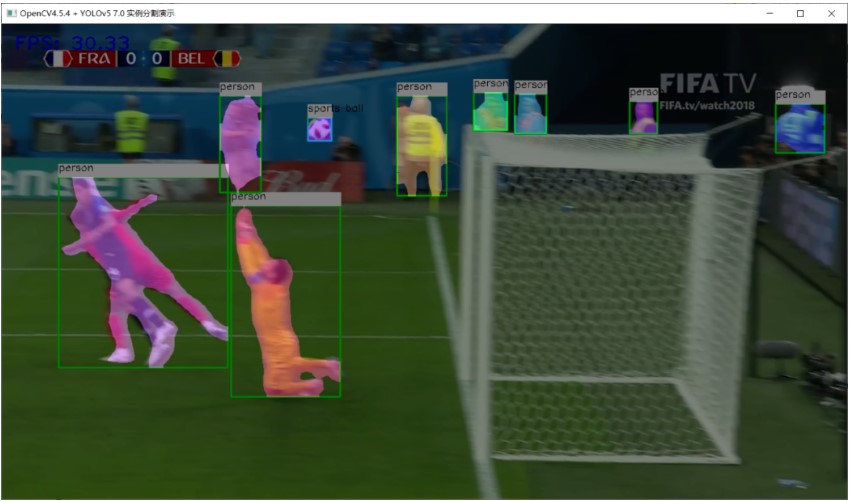
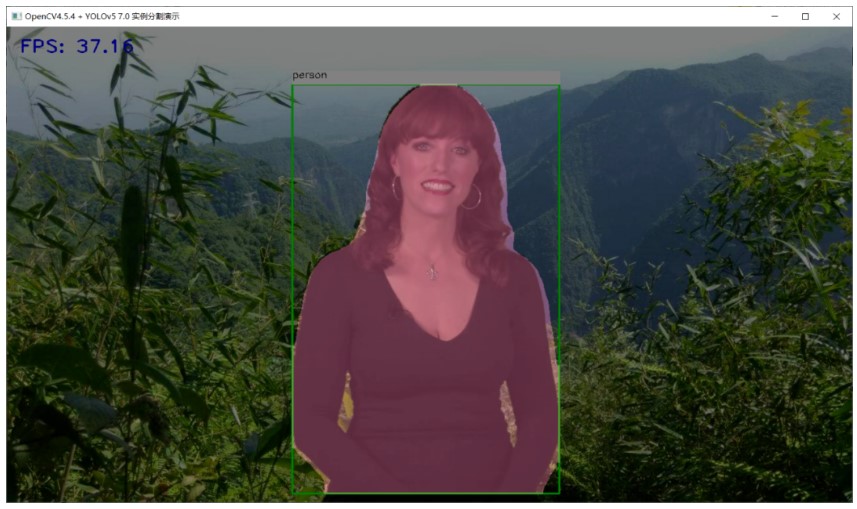
基本上可以跑到40FPS左右,感覺很不錯了!
審核編輯:劉清
-
OpenCV
+關(guān)注
關(guān)注
31文章
635瀏覽量
41388 -
NMS
+關(guān)注
關(guān)注
0文章
9瀏覽量
6047 -
dnn
+關(guān)注
關(guān)注
0文章
60瀏覽量
9058
原文標(biāo)題:OpenCV4.5.4+YOLOv5 7.0分割推理演示
文章出處:【微信號:CVSCHOOL,微信公眾號:OpenCV學(xué)堂】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
在Jetson Nano上使用TensorRT C++實現(xiàn)YOLOv5模型推理
Yolov5算法解讀
在C++中使用OpenVINO工具包部署YOLOv5-Seg模型

在RK3568教學(xué)實驗箱上實現(xiàn)基于YOLOV5的算法物體識別案例詳解
怎樣使用PyTorch Hub去加載YOLOv5模型
使用Yolov5 - i.MX8MP進行NPU錯誤檢測是什么原因?
如何YOLOv5測試代碼?
YOLOv5 7.0版本下載與運行測試
使用旭日X3派的BPU部署Yolov5

三種主流模型部署框架YOLOv8推理演示
yolov5和YOLOX正負(fù)樣本分配策略

OpenCV4.8+YOLOv8對象檢測C++推理演示

基于OpenCV DNN實現(xiàn)YOLOv8的模型部署與推理演示






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論