") 卡爾曼濾波器遞歸算法筆記整理
卡爾曼濾波器遞歸算法筆記整理
后面準(zhǔn)備抽時間把DR_CAN老師的卡爾曼濾波的視頻的筆記也會做一下整理。
主要還是心里有個執(zhí)念,以前在做智能車比賽的時候,需要對六軸傳感器做濾波角度計算的。這部分代碼則只是將學(xué)長的代碼copy之后,并不懂其中的原理。
所以其中的一個目的:就是把筆記做完,再看看原來的代碼,那是曾經(jīng)的熟悉且鞭辟近里。
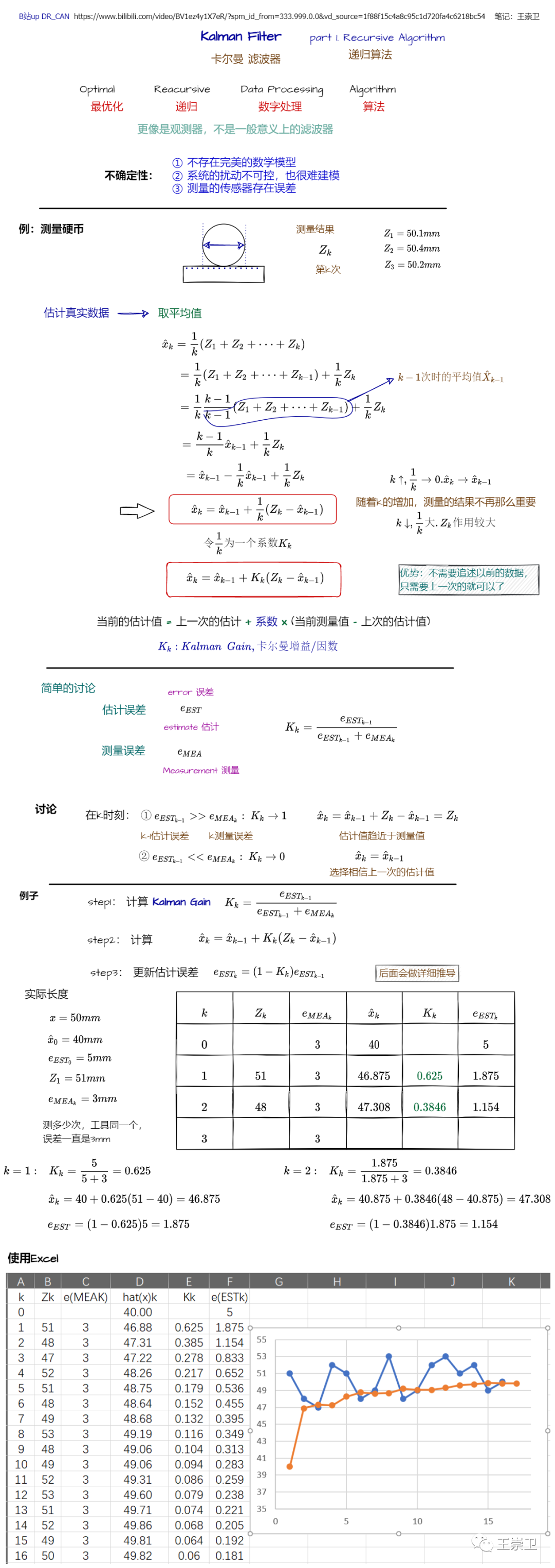
卡爾曼濾波器
更像是觀測器,不是一般意義上的濾波器。
現(xiàn)實中的大量不確定性
不存在完美的數(shù)學(xué)模型
系統(tǒng)的擾動不可控,很難建模
測量的傳感器存在誤差
卡爾曼增益
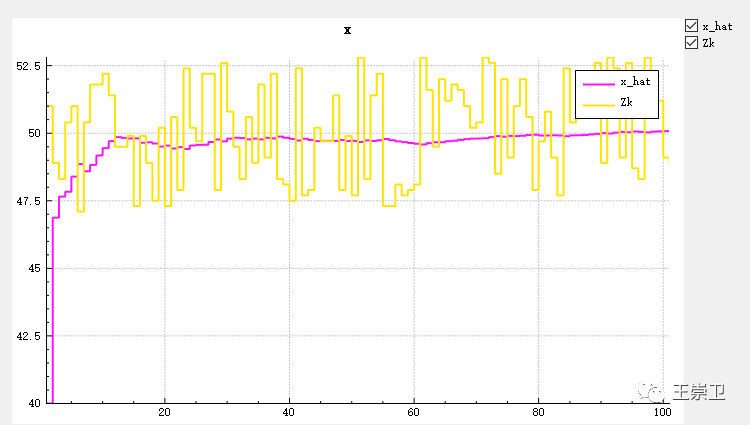
qt的仿真:
老師用Excel做的圖,我用ctrlsim也做了一個簡單的仿真。
https://gitee.com/wang_chong_wei/CtrlSim
https://github.com/chongweiwang/CtrlSim
CtrlSim_TI_SMO觀測器
[現(xiàn)代控制理論]3-5_連續(xù)系統(tǒng)離散化
CtrlSim_電機控制。
審核編輯:劉清
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
電機控制
+關(guān)注
關(guān)注
3537文章
1883瀏覽量
268979 -
卡爾曼濾波器
+關(guān)注
關(guān)注
0文章
54瀏覽量
12196 -
六軸傳感器
+關(guān)注
關(guān)注
1文章
18瀏覽量
16242
發(fā)布評論請先 登錄
相關(guān)推薦
卡爾曼濾波算法的基本原理
卡爾曼濾波(Kalman Filter)是一種遞歸的、自適應(yīng)的濾波算法,廣泛應(yīng)用于估計系統(tǒng)狀態(tài)和
卡爾曼濾波器介紹
摘要1960年,卡爾曼發(fā)表了他著名的用遞歸方法解決離散數(shù)據(jù)線性濾波問題的論文。從那以后,得益于數(shù)字計算技術(shù)的進步,卡爾
發(fā)表于 07-14 13:06
卡爾曼濾波器算法(C語言)
及噪聲協(xié)方差;估計階段由回歸模型代替狀態(tài)方程和觀測方程,相應(yīng)的噪聲協(xié)方差實時自適應(yīng)調(diào)整.該方法克服了傳統(tǒng)方法容易受系統(tǒng)動態(tài)模型不確定性和噪聲協(xié)方差不準(zhǔn)確限制的問題,仿真結(jié)果驗證了算法的有效性卡爾曼
發(fā)表于 10-24 09:59

使用FPGA實現(xiàn)自適應(yīng)卡爾曼濾波器的設(shè)計論文說明
在視頻圖像獲取過程中“由于噪聲對圖像序列的降質(zhì)”需要設(shè)計實時噪聲濾波器。討論了視頻圖像的卡爾曼濾波問題及自適應(yīng)卡爾
發(fā)表于 01-22 14:29
?22次下載
使用FPGA實現(xiàn)自適應(yīng)卡爾曼濾波器的設(shè)計論文說明
在視頻圖像獲取過程中“由于噪聲對圖像序列的降質(zhì)”需要設(shè)計實時噪聲濾波器。討論了視頻圖像的卡爾曼濾波問題及自適應(yīng)卡爾
發(fā)表于 01-22 14:29
?13次下載
卡爾曼濾波器的特性及仿真
我們前一篇關(guān)于人物識別跟蹤的文章《視頻連續(xù)目標(biāo)跟蹤實現(xiàn)的兩種方法和示例(更新)》里講到,視頻圖像中物體的識別和跟蹤用到了卡爾曼濾波器(KF)。這里對這個話題我們稍微對這個卡爾






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論