 如何將AI應用于高級自動駕駛的規控
如何將AI應用于高級自動駕駛的規控
AI通常用于為高級自動駕駛的車輛提供感知能力。但AI也能幫助自動駕駛汽車(AV)在規劃和控制方面做出更安全的決策嗎?任何習慣于基于控制理論的確定性算法的人都很難被說服。但Infineon提出了一個激進的反駁,并一直在與汽車行業的利益相關者就其安全問題進行辯論。
AI安全嗎?AI驅動的汽車可靠嗎?它們能被驗證嗎?
這些都是向高級自動駕駛車輛的開發人員提出的好問題。
隨著先進的神經網絡在計算機視覺方面得到良好發展,在AV上使用AI已經成為一種公認的規范。不過,這仍然是一個信任的問題。
Infineon的嵌入式AI和自動駕駛專家Florian Hauer表示,AI可以幫助機器感知它所看到的東西(行人、信號燈、自行車……),并獲得對環境獲的“非常高級的抽象理解”,從而知道如何在該環境中采取行動。
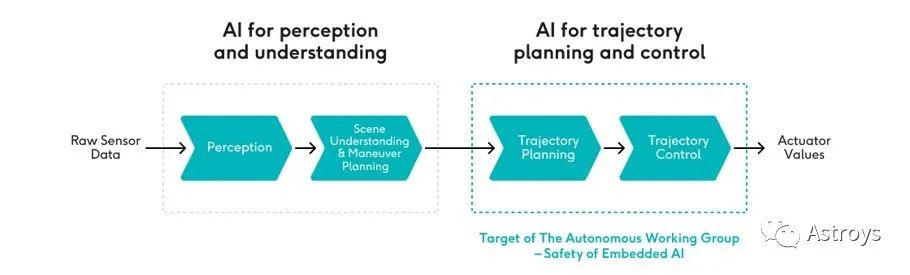
在自動駕駛的計算鏈中,這些最初的步驟被稱為感知和場景理解。它們是為高級自動駕駛車輛規控系統做準備的兩個基本模塊。
計算機視覺在前兩個模塊中起著關鍵作用。Hauer說:“你已經在使用AI作為主要解決方案。在感知和場景理解方面,我認為沒有人會回到深度學習技術之前。”
然而,他補充說,AI在規控中卻“很少或幾乎不使用”。
Hauer說:“通過軌跡規劃,車輛可以在接下來的1-5秒內繪制出它必須走的路徑,以執行某些操作,如在信號燈前停車或變道。在軌跡控制中,規劃的路徑在道路上被執行。車輛決定向左或向右行駛。它可以選擇在時間和空間中移動的速度,以及何時應該加速或減速。”
為了執行涉及規控制的安全關鍵計算,今天的高級自動駕駛車輛使用成熟的確定性算法,該算法基于由業內專家在40多年間開發的控制理論。Tier1和OEM對經典算法有著“共同的理解”,對安全的定義也達成了一致。到目前為止,汽車生態系統中的大多數參與者還沒有考慮過使用AI進行規控。
Infineon正在打破這一模式,建議業界應用AI來增強用于規控的確定性算法。Hauer說,目標不是取代經典算法,而是提高它們的安全性、可靠性和效率。
Infineon在推進嵌入式AI的安全性方面有既得利益,其最新的Auriz MCU具有嵌入式AI能力。但它提出的使用AI進行規控的建議目前只是一個假設。Hauer承認首先需要回答安全問題,而將AI應用于規控中“安全意味著什么”是一個“不能由單個公司回答”的復雜問題。
因此,Infineon迫切希望在利益相關者之間建立“共識”。該公司來到TTTech成立的汽車行業合作論壇The Autonomous,分享其假設,與主要參與者合作,并領導一個關于嵌入式AI安全性的工作組討論。
動機
是什么促使Infineon建議將AI應用于高級自動駕駛的規控?為什么這對汽車行業如此重要?
該公司系統架構和應用高級負責人Jürgen Sch?fer表示,答案可以歸結為高級自動駕駛車輛達到量產所需的“成本和能效”。
許多人認為如今的AV設計過度。在Sch?fer的觀點中,“今天的AV原型的利潤率可以降低”。出于安全考慮,AV公司復制計算鏈,在獨立的信號處理鏈上運行兩種算法,使用的不是一個而是一組控制器。考慮到現實駕駛的不確定性,系統可能很難應對意外。因此,工程師們覺得在AV系統中設計一個廣泛的安全冗余更舒服,Sch?fer觀察到,冗余被認為可以增強安全性。
Sch?fer說,雖然在先進的架構中冗余被認為是必要的,但AV公司最終推出了成本過高的AV原型,部署了“消耗2000W的電子控制系統”,并“使用液冷單元,這進一步增加了成本,使系統不可靠”。
使用機器學習算法可以幫助系統設計者避免過度設計。他說:“最終,機器學習算法是唯一能從數學上預測未來的算法。通過機器學習算法,你可以說,例如,基于系統和環境在過去20秒的表現,(這就是)下一秒可能發生的事。”
在嘗試以線性方向預測未來時,你可以查看系統環境并謹慎地進行,但是你仍然可能遇到阻礙系統反應能力的緊急情況。Sch?fer表示,以“隨機方式”預測未來的機器學習算法,通過一個涉及隨機確定的事件序列的過程,有望更好地避免這種僵局。
安全用例為AI在規控中的應用建立一個安全用例并不簡單。Hauer承認,在行業發展到這一步之前,許多過程都會發揮作用。
他說,首先,將AI整合到規控中會影響開發過程的不同階段。必須確定和分析相關的開發步驟,以確定它們對系統其余部分的影響。
接下來要考慮的是數據。數據是否具有代表性?它是有意義的嗎?Hauer說:“在收集數據以處理極端情況時,我們需要了解神經網絡是否被正確訓練或過度擬合,或者它是否學習了正確的東西。”
Hauer指出,理解使用AI的影響和“副作用”是一回事,考慮它的“設計含義”是另一回事。“例如,我們能否為AI構建一個安全包裝?如果系統檢測到AI的建議不可取,我們能否構建一個經典的算法來介入?”
為了建立安全論點,Hauer說,Infineon的策略是“使用一些非常具體的、特定的用例,看看我們是否可以降低風險”,簡單地告訴工程師“在規劃中使用AI太抽象且對任何人都沒有幫助,所以我們正在開發一些具體的規控示例”。
他重申,目標是降低風險。“我們想要深入到技術層面,實際觀察這些例子,看看哪些是問題實例,以及我們如何使它們安全。”在這樣做的過程中,“我們制定或派生一個‘解決方案類型’”。
Hauer說,標準化并不是The Autonomous的工作小組的目標。相反,該小組計劃提供一個參考解決方案,其中可能包括算法建議和最佳實踐。
使用哪種神經網絡?
應用于計算機視覺的神經網絡有著很長的歷史。但什么樣的神經網絡將被用于規控呢?
Hauer回答說:“我們不會更換整個模塊。相反,我們正在增強它。因此,我們可以在哪里以及如何進行增強,有很多選擇。”
他指出,單就規劃而言,“你有一堆不同類別的解決方案,而每一類都有大量不同的技術來運用它們。而對于每一種技術,你都有大量的選擇,如何用AI來增強它。”
換句話說,沒有一個單一的、標準的網絡可以完成這項工作。
Hauer補充說,一個重要的說明是,計算機視覺和規控執行兩種完全不同的工作。計算機視覺提供檢測、分類和分割。為了增強規劃,必須執行的任務是回歸和預測。回歸使用一種統計方法,試圖確定一個因變量和一系列其他變量之間關系的強度和特征。這為預測接下來發生的事奠定了基礎。
因此,在計算機視覺和規控中使用的網絡類型是不同的。后者會小得多,因為規劃只是想知道下一步是什么樣子。
Hauer說,在解決預測問題時,最有價值的結構是眾所周知的拓撲結構,如循環神經網絡。他描述了一種被稱為LSTM(long short-term memory)的特定網絡類型,它模擬了大腦的工作方式。當你第一次看到某物時,你會把它放入你的短期記憶中,并試圖理解它的來源和含義。如果理解了,那么這個物體或經歷就會進入長期記憶。其基本思想是,要預測一個結果,你需要足夠的歷史來理解上下文。
相比之下,MLP(multilayer perceptron)是原始的神經網絡結構。它是一個前饋人工神經網絡,從一組輸入生成一組輸出。Sch?fer說,MLP是在1960年左右發展起來的,而LSTM在1998年才首次發表,從數學角度來看是非常新的神經網絡。
時間表
該公司的嵌入式AI安全工作組今年開始工作。根據Hauer的說法,該工作組的時間表為18個月,目標是在2024年發表技術論文或技術報告。
Infineon認為,嵌入式AI控制器,如Aurix MCU,可以在包括高級自動駕駛車輛在內的應用中提供低延遲、低處理功耗的解決方案來解決復雜問題。為了獲得車廠的支持,Infineon必須建立一個安全用例論證,將AI應用于AV的規控等任務,可以降低安全風險。為此,它需要來自行業利益相關者的合作。
-
AI
+關注
關注
87文章
31146瀏覽量
269478 -
機器學習
+關注
關注
66文章
8425瀏覽量
132772 -
自動駕駛
+關注
關注
784文章
13874瀏覽量
166609
原文標題:AI能否應用于自動駕駛規控領域?
文章出處:【微信號:Astroys,微信公眾號:Astroys】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
如何實現自動駕駛規控算法的仿真驗證

使用PVA引擎優化自動駕駛汽車CV開發流水線

自動駕駛汽車安全嗎?


Rapidus與電裝共享芯片設計,加速AI與自動駕駛發展


美國擬禁止自動駕駛汽車使用中國軟件
FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
中級自動駕駛架構師應該學習哪些知識
初級自動駕駛架構師應該學習哪些知識
未來已來,多傳感器融合感知是自動駕駛破局的關鍵
滴滴自動駕駛與廣汽埃安聯手推出L4自動駕駛量產車型
自動駕駛已成現實?賽思時間同步服務器賦能北京市高級別自動駕駛示范區,為自動駕駛提供中國方案






 工商網監
工商網監
評論