") 馬斯克炮轟的激光雷達(dá)到底什么角色?
馬斯克炮轟的激光雷達(dá)到底什么角色?
靠8個(gè)攝像頭,特斯拉憑什么搞自動(dòng)駕駛?
馬斯克炮轟的激光雷達(dá)到底什么角色?
有這樣的疑問是出于最近的一條新聞:“特斯拉宣布從10月開始?xì)W洲、北美、中東地區(qū)交付的Model 3、Model Y,將取消超聲波雷達(dá),隨后將推及到全球范圍,Model S和Model X也將在2023年一并取消超聲波雷達(dá)。”
要知道特斯拉的自動(dòng)駕駛方案在最初還使用著1顆攝像頭+1顆毫米波雷達(dá)+12顆超聲波雷達(dá)的組合,隨著特斯拉AI算法和自研的FSD芯片不斷精進(jìn)后。..。..
馬斯克覺得他行了。
他炮轟激光雷達(dá),用“闌尾”形容激光雷達(dá)在車上的作用,用“foolish”形容那些使用激光雷達(dá)的人們,包括與小鵬汽車創(chuàng)始人何小鵬在推特上互嗆。他對(duì)雷達(dá)家族的深惡痛絕,仿佛有種“錯(cuò)的不是我,而是這個(gè)世界”的感覺。
之所以有這樣的感覺,是因?yàn)樘厮估@幾年的動(dòng)作完全“不合群”。別的車企,特別是那些造車新勢(shì)力瘋狂“上價(jià)值”,恨不得車上塞滿傳感器。而特斯拉在給汽車“減負(fù)”,去年5月特斯拉宣布砍掉毫米波雷達(dá),現(xiàn)在又把超聲波雷達(dá)砍了,至于激光雷達(dá),如果從量產(chǎn)車層面上看,它沒出現(xiàn)過,而在測(cè)試車輛上,它也就曇花一現(xiàn)。
在自動(dòng)駕駛方案上,從此有了向左向右的問題,特斯拉一路向北,離開了有雷達(dá)的季節(jié)。..。..
此時(shí)壓力來到了那8顆攝像頭上。..。..
別人眼里的激光雷達(dá)
首先了解下激光雷達(dá)的工作原理,它本質(zhì)是向目標(biāo)發(fā)射激光束,然后激光束碰到目標(biāo)物后會(huì)反彈或是散射,返回的光波會(huì)進(jìn)入激光雷達(dá)的接收器中,因?yàn)楣饷}沖是以光速傳播,所以速度是已知的,繼而可以將光波發(fā)射的一個(gè)來回的時(shí)間換算成距離。
這只是測(cè)距。當(dāng)然一個(gè)激光束是沒有用的,就像我們?cè)谄岷谝黄沫h(huán)境中行走,肯定會(huì)需要一個(gè)手電筒吧,太小不頂用,太大拿不動(dòng)。
激光雷達(dá)也是這樣,激光束發(fā)射的頻率可以從每秒幾個(gè)脈沖到每秒幾萬個(gè)脈沖,不斷地掃描物體,就可以得到物體上所有目標(biāo)點(diǎn)的數(shù)據(jù),經(jīng)過數(shù)據(jù)處理后,就可以得到精準(zhǔn)的3D圖像。
那么問題來了,開車上路,上下前后左右都會(huì)有突發(fā)狀況或是障礙物,激光束只會(huì)朝一個(gè)方向射出,怎么一下子識(shí)別四周呢?
跟你拿手電筒左右來回照一個(gè)做法,那就是讓激光雷達(dá)轉(zhuǎn)圈圈~ 你可以想象成一個(gè)渾身插滿燈泡的陀螺。
就像這樣。..。..
這就是機(jī)械式激光雷達(dá),靠電機(jī)帶動(dòng)旋轉(zhuǎn)使激光束可以360度全方位掃描。目前市面上的雷達(dá)類型多按掃描方式進(jìn)行區(qū)分,按照掃描方式有無機(jī)械轉(zhuǎn)動(dòng)部件可分為機(jī)械旋轉(zhuǎn)、混合固態(tài)、純固態(tài)三種。整體發(fā)展趨勢(shì)從機(jī)械式向純固態(tài)演變。
但是如果只靠單線束激光,再怎么旋轉(zhuǎn)也只能掃一個(gè)平面,不能測(cè)量物體的高度,所以并不適用開車這么復(fù)雜的應(yīng)用場(chǎng)景。因此除了掃描方式外,線束的多少也決定了成像的精細(xì)度。所謂單線雷達(dá)就是只有一個(gè)激光發(fā)射器和接收器,多線雷達(dá)就是在垂直方向上有多套收發(fā)裝置,目前市面上多見的多線雷達(dá)有32線、64線、96線、128線等。
這樣一堆光波打在不同物體的表面后所形成的畫面如下:

是不是有一種看素描畫的感覺?雖然成像不太好看,但是給自動(dòng)駕駛提供了一個(gè)立體的世界,可以幫助算法更好地識(shí)別周遭的環(huán)境。
沒有對(duì)比就沒有傷害,要清楚認(rèn)識(shí)到激光雷達(dá)的重要性,還要對(duì)比下毫米波和超聲波雷達(dá)。
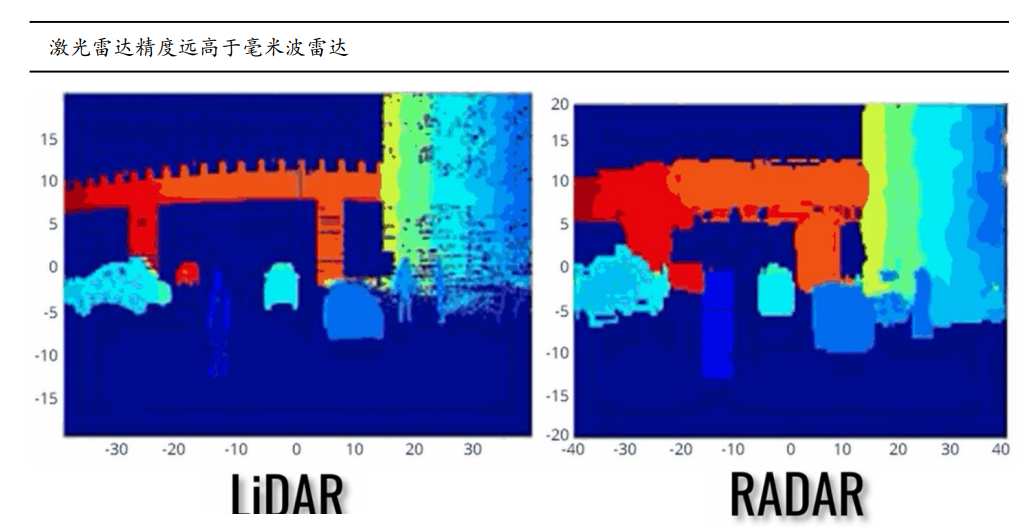
毫米波雷達(dá)的探測(cè)距離短,受到頻段損耗的影響,也無法感知行人,而且對(duì)障礙物無法精準(zhǔn)建模,特別是高處物體和小型物體,但勝在穿透性和抗干擾能力強(qiáng),因此主要用于防撞。
超聲波雷達(dá)相當(dāng)于毫米波雷達(dá)再減配,探測(cè)距離很短,方向性差,還受制于聲波傳輸速度,優(yōu)點(diǎn)可能就是便宜,所以你看那些車企一用就是十幾顆,它主要應(yīng)用在低速泊車等短距離場(chǎng)景。

由此看來,完整的一套多傳感器融合的自動(dòng)駕駛感知方案,就是激光雷達(dá)構(gòu)建3D世界,然后攝像頭豐富色彩、輪廓、紋理等細(xì)節(jié)信息,其余那兩顆雷達(dá)幫忙打下手,所以激光雷達(dá)是必不可少的C位角色。
特斯拉眼里的激光雷達(dá)
特斯拉所恪守的信條,其中之一肯定有成本,從特斯拉的供應(yīng)鏈策略里就能看出端倪。
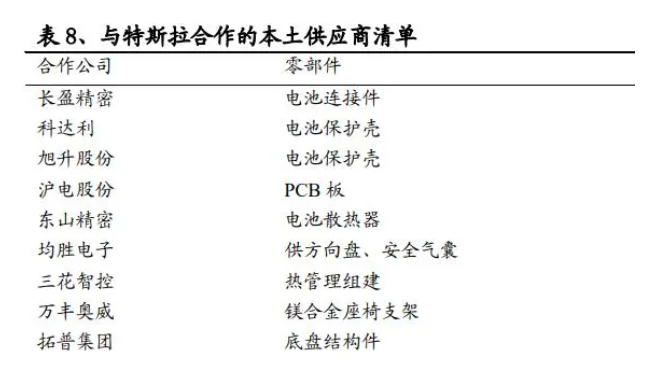
簡(jiǎn)單來說,特斯拉的供應(yīng)鏈策略就是一手抓(一體化)和就地取材(本土化)。以電池供應(yīng)為例,特斯拉在上游原材料領(lǐng)域持續(xù)發(fā)光發(fā)熱,與各地企業(yè)簽署了供應(yīng)協(xié)議。又以特斯拉上海工廠為例,在特斯拉上海廠運(yùn)營(yíng)一段時(shí)間后,寧德時(shí)代成為特斯拉上海的獨(dú)家供應(yīng)商,其他諸如結(jié)構(gòu)件、座椅支架、連接件等已經(jīng)國(guó)產(chǎn)化。
特斯拉上海廠支撐了很大一部分產(chǎn)能,同時(shí)也為特斯拉降低了一大筆成本。上海廠生產(chǎn)Model 3車型的單位成本較美國(guó)工廠下降65%。
特斯拉這樣做都是為了降低運(yùn)輸成本,提高生產(chǎn)效率。除了供應(yīng)鏈策略外,特斯拉還采用新技術(shù)來降低成本。例如,特斯拉在2020年推出的4680電池,在電池組層面每千瓦時(shí)成本降低14%。2021年,特斯拉展示了一體式底盤電池包,這種一體化壓鑄車身,減重10%,減少370個(gè)車身零部件。
在毫米波雷達(dá)和超聲波雷達(dá)由于性能上的薄弱,已經(jīng)開始拖后腿時(shí),特斯拉自然可以以成本為由,把它們給炒了。根據(jù) Munro Live 在油管上的一則視頻分析,特斯拉通過移除超聲波傳感器,估計(jì)每輛車可節(jié)省成本114美元(約817元人民幣)。
而激光雷達(dá)早期多用于軍事、工業(yè)領(lǐng)域,轉(zhuǎn)用民用領(lǐng)域,首先面臨的問題就是成本。現(xiàn)在,一顆高性能的激光雷達(dá)的價(jià)格可至上萬元,而Velodyne的64線激光雷達(dá)售價(jià)高達(dá)數(shù)萬美元,但一顆高清攝像頭的價(jià)格就幾百元。
這么高昂的成本是摳摳搜搜的特斯拉所不能接受的,但成本也僅能作為一個(gè)通用理由。
將雷達(dá)家族除名,是特斯拉所遵循的“第一性原理”在自動(dòng)駕駛方案上的寫照。第一性原理指的是回歸事物最基本的條件將其拆分成各要素,進(jìn)行結(jié)構(gòu)分析,從而找到實(shí)現(xiàn)目標(biāo)最優(yōu)路徑的方法。
在自動(dòng)駕駛方面,馬斯克認(rèn)為人可以靠視覺來駕駛汽車,那么車僅依靠攝像頭也可以。唯一需要做的,就是找到如何提取攝像頭所獲取的信息,并利用這部分信息來訓(xùn)練算法模型。
馬斯克這個(gè)耿直boy認(rèn)為可以,它就一定是可以。就像當(dāng)年馬斯克堅(jiān)持走自動(dòng)化生產(chǎn)工廠,差點(diǎn)讓Model 3難產(chǎn)至死,從“生產(chǎn)地獄”爬出來后,馬斯克選擇了妥協(xié)。
而這一次,馬斯克不需要妥協(xié),因?yàn)樘厮估乃惴ê蛙浖αΑ?/p>
特斯拉的底氣是硬件嗎?
很顯然是。因?yàn)?顆攝像頭背后是特斯拉自研的FSD自動(dòng)駕駛芯片和DOJO超算。
2019年,特斯拉推出了自研的自動(dòng)駕駛芯片F(xiàn)SD,在此之前特斯拉使用過MobileEye和英偉達(dá)的計(jì)算平臺(tái)。相較于上一代自動(dòng)駕駛平臺(tái),F(xiàn)SD芯片將算力提升至144TOPS,可以每秒處理10億像素的圖像信息。
2021年,特斯拉再度推出自研的AI芯片D1,用來訓(xùn)練超算DOJO。DOJO可以利用特斯拉海量的視頻數(shù)據(jù),來做無人標(biāo)注和訓(xùn)練,能夠自動(dòng)學(xué)習(xí)和識(shí)別標(biāo)記道路上的一切要素。今年AI Day上,特斯拉宣布,由D1芯片組成的高達(dá)1.1E算力的超算系統(tǒng)EXA POD將于明年一季度正式量產(chǎn),屆時(shí)DOJO相比英偉達(dá)A100,可以達(dá)到最高4.4倍的單芯片訓(xùn)練速度,而訓(xùn)練延遲相比同等規(guī)模的GPU,最低可至1/50。
簡(jiǎn)單來說,特斯拉給AI提供了學(xué)習(xí)課本還不說,連自習(xí)室都準(zhǔn)備好了,而且這學(xué)習(xí)資料和自習(xí)室的規(guī)模和裝修程度愈發(fā)豪華,剩下的就交給AI自己了。
但特斯拉的底氣也不只是硬件。有了硬件的支撐,特斯拉擁有的海量數(shù)據(jù)和AI算法、模型,才是與其他車企拉開身位的地方。
特斯拉從2016年10月開始推出FSD(Full-Self Driving)自動(dòng)駕駛套件,其選裝價(jià)格已經(jīng)一路上漲至1萬美元。今年AI Day上,特斯拉宣布過去一年,有2000輛車參與了FSD Beta的測(cè)試,而目前這個(gè)數(shù)量已來到16萬。特斯拉介紹,得益于DOJO超算,特斯拉去年訓(xùn)練了7.5萬個(gè)神經(jīng)網(wǎng)絡(luò)模型,相當(dāng)于8分鐘訓(xùn)練一個(gè),推送了35個(gè)更新,現(xiàn)階段,F(xiàn)SD Beta已經(jīng)可以在一定程度上實(shí)現(xiàn)完全自動(dòng)駕駛。
每天在路上飛馳的特斯拉,已經(jīng)提供了超14.4億幀的視頻數(shù)據(jù),視頻緩存達(dá)30PB,需要超過10萬個(gè)GPU訓(xùn)練小時(shí)。
有了海量的數(shù)據(jù),問題來到了算法和模型。
特斯拉在今年CVPR上發(fā)布了全新的算法,名為Occupancy Networks,用來改進(jìn)AI模型HydraNets。
這個(gè)算法也是為了彌補(bǔ)缺少激光雷達(dá)所帶來的問題。
我們知道計(jì)算機(jī)視覺提供的是2D圖像,而現(xiàn)實(shí)世界是3D的,這就造就了很多識(shí)別上的問題。比如如何看到被遮擋的物體?計(jì)算機(jī)視覺中的模型都是以規(guī)整矩形來輸出,但很多物體形狀不規(guī)則,碰上那些奇形怪狀的物體該如何識(shí)別?沒有在數(shù)據(jù)庫(kù)中出現(xiàn)的物體突然出現(xiàn)在眼前又該如何識(shí)別?
以上這些問題,引入激光雷達(dá)是正解,因?yàn)樗軜?gòu)建3D傳感,來彌補(bǔ)2D感知上的失效,至少這是行業(yè)大部分企業(yè)所認(rèn)同的。
那Occupancy Networks是如何解決的呢?
它把檢測(cè)識(shí)別這個(gè)概念變成了“占用”,簡(jiǎn)單來說這個(gè)算法把世界切成了無數(shù)個(gè)小方格。
就像“我的世界”這款游戲一樣,如下圖:

它判斷這些小方格里面有沒有東西,有就代表占用,沒有就是空白,這樣先解決了那些不規(guī)則輪廓的識(shí)別問題。
這些小方格共同構(gòu)建了一個(gè)3D體積,也形成了一張3D的鳥瞰圖。
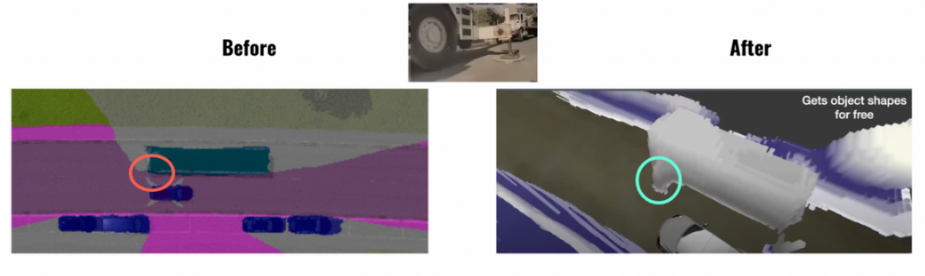
然后特斯拉將這些3D體積通過訓(xùn)練出來的3D重建場(chǎng)景進(jìn)行比對(duì),最終還原了攝像頭所看到的現(xiàn)實(shí)世界,如下圖:

看著是不是和激光雷達(dá)掃出來的世界差不多?
當(dāng)然特斯拉的絕活還不止這些,什么自動(dòng)標(biāo)注工具,車道線網(wǎng)絡(luò)等等都是為了讓純視覺自動(dòng)駕駛成真而努力。
毫米波和超聲波雷達(dá)本身的作用是測(cè)距和測(cè)速,現(xiàn)在特斯拉的算法和模型已經(jīng)直指激光雷達(dá)的作用了,雷達(dá)家族被砍也就不足為奇了。
向左向右?
激光雷達(dá)的先鋒,LBEO申請(qǐng)破產(chǎn),推崇固態(tài)激光雷達(dá)的Ouster股價(jià)跌破一美元,馬斯克對(duì)激光雷達(dá)的評(píng)論說對(duì)了?
那也未必,特斯拉與其他車企最大的區(qū)別還是其AI算法和軟件研發(fā)能力。對(duì)于特斯拉而言,如果軟件buff足夠強(qiáng)大,數(shù)據(jù)足夠多,那么硬件上就可以做到足夠的cost down,何樂而不為呢?
而其他算法能力還沒那么強(qiáng)的公司,現(xiàn)階段除了激光雷達(dá)外沒有其他選擇。多傳感器融合是能極大提升感知的精確性,也就提升了安全性。車是與生命安全強(qiáng)相關(guān)的產(chǎn)品,而安全是要做加法的,在安全面前,解決哪怕0.1個(gè)百分點(diǎn)的錯(cuò)誤也比討論價(jià)值更有意義。
無論是多傳感器融合還是單兵作戰(zhàn),作為環(huán)境感知,傳感器的功能無外乎相當(dāng)于人的視覺。但人類在駕駛途中,依靠的可不僅僅是視覺,或者說視覺只是基礎(chǔ)。
隨著傳感器的技術(shù)發(fā)展,它們可以從識(shí)別一個(gè)靜態(tài)物體到一個(gè)紅綠燈,也可以從一個(gè)動(dòng)態(tài)物體到一個(gè)行人甚至是背著包或者扛著物品行走的人。
但是遇到一輛高速行駛的車突然變道,原本在路邊等待的行人突然沖向你車前,而你旁邊正好也有一輛車,這時(shí)是該選擇緊急剎車與后車相撞,還是緊急變道與旁邊的車相撞以此避免撞到行人?這兩種緊急避險(xiǎn)的辦法哪種損失又更小?
等等這些突發(fā)狀況都是在讀秒間,傳感器只能告訴你發(fā)生了什么,但無法告訴你該怎么做,而真正要做到自動(dòng)駕駛,最關(guān)鍵的問題,最要解決的問題,往往是決策層面。
連人都會(huì)慌了神,失了措,那擺在一堆數(shù)據(jù)面前的路還很長(zhǎng)。從這一點(diǎn)看,提升軟件能力,AI算法能力是所有自動(dòng)駕駛企業(yè)最終的目標(biāo)。
向左還是向右,向北還是向南,殊途同歸罷了。
審核編輯 :李倩
-
傳感器
+關(guān)注
關(guān)注
2552文章
51237瀏覽量
754753 -
雷達(dá)
+關(guān)注
關(guān)注
50文章
2951瀏覽量
117686 -
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
3991瀏覽量
190080
原文標(biāo)題:馬斯克不相信雷達(dá),為什么?
文章出處:【微信號(hào):芯世相新能源,微信公眾號(hào):芯世相新能源】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
一則消息引爆激光雷達(dá)行業(yè)!特斯拉竟然在自研激光雷達(dá)?
馬斯克凈資產(chǎn)突破4470億美元
馬斯克重申:純視覺是自動(dòng)駕駛的未來
激光雷達(dá)會(huì)傷害眼睛嗎?

?小鵬新車或放棄激光雷達(dá) 馬斯克發(fā)評(píng)論
曾被馬斯克嫌棄的激光雷達(dá),已在新能源汽車領(lǐng)域提前“跨越鴻溝”

馬斯克也給英偉達(dá)打工了
狂踩激光雷達(dá)的馬斯克,如今竟成Luminar的榜一大哥?
馬斯克稱特斯拉的FSD系統(tǒng)不需要激光雷達(dá)

Luminar: 特斯拉是其最大激光雷達(dá)客戶
車載激光雷達(dá)到底安不安全?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論