 模擬電調和數字電調區別
模擬電調和數字電調區別
電調固件
電調固件是在每個電調上運行的軟件,它確定電調的性能,支持的協議以及可以使用的配置接口。電調可以使用的固件取決于硬件。
SimonK:最古老的兩種開源電調固件之一,已經過時不再更新。內嵌了一個開環foc驅動
BLHeli:最古老的兩種開源電調固件之一,由于其廣泛的功能和友好的用戶界面而變得流行。
BLHeli_S:BLHeli固件的第二代。專門為具有Busybee處理器的電調開發。
BLHeli_32:第三代和最新一代BLHeli固件。專門為32位電調編寫,不再開源。
電調協議
電調協議是飛行控制器和電調用于通信的語言,決定了信號從飛控到電調的發送速度。
四軸飛行器使用的電調協議及信號寬度:
Standard PWM :1000us – 2000us
Oneshot125:125us – 250us
Oneshot 42:2us – 84us
Multishot:5us – 25us
Dshot
Dshot150 :106.8us
Dshot300 :53.4us
Dshot600 :26.7us
DShot1200:13.4us
ProShotDshotDShot(Digital Shot,是數字協議)(相對于oneshot,oneshot125,oneshot42,multishot等模擬協議)。它最初是由Felix在KISS提出的,后來被Betaflight和BLHeli_S開發團隊采用。是用來和刷有BLheli固件的電調通訊的協議。
模擬電調和數字電調區別
模擬電調協議每隔幾微秒就將電脈沖從飛控發送到電調。脈沖持續時間的長短(油門大小)決定了電機的功率。這種控制方案受到電噪聲和電脈沖定時精度的限制。
使用 DShot 數字化意味著飛控將以數字編號的形式向電調發送精確的油門值。這個數字有一個校驗值,以便從飛控發送到電調的油門值永遠不會被識別錯誤。
與Oneshot和Multishot相比,DShot有什么優勢:
無需進行電調行程校準
更精確的傳輸信號,更強大的抗干擾能力
分辨率為2048,而其他協議分辨率為1000
比Oneshot協議更快
更安全,每個信號 電調都可以檢測意外損壞的數據
DSHOT并不是效率最高的協議
DShot的速度:
目前常用的DShot協議有:DShot600,DShot300,DShot150 (DShot1200已經在最新的betaflight4.11固件取消了),其傳輸速率:
?DShot600 – 600,000 bits/Sec
?DShot300 – 300,000 bits/Sec
?DShot150 – 150,000 bits/Sec
引入 DSHOT300 和 DSHOT150 是為了確保支持功能較弱的舊ESC(電調),DSHOT1200是較新的協儀,有些電調可能還不支持。
例如,DShot600的頻率為600,000 / 1637500hz= 37.5 KHz,這意味著將一個油門值從飛控發送到電調需要大約26.7 uS。
各種電調傳輸協議速度對比與 Oneshot125、 Oneshot42和 Multishot 的速度相比(假設信號是100% 油門)
Oneshot125 – 250 uS
DShot150 – 106.7 uS
Oneshot42 – 84 uS
DShot300 – 53.3 uS
DShot600 – 26.7 uS
Multishot – 25 uS
快速傳輸速度的 DShot 理論上將允許高達33KHz的飛控運行頻率。不要高達37.5 KHz,因為需要留有一些空間。雖然 DShot600沒有 Multishot 那么快,但是只要它比飛控運行頻率快就足夠了。
Dshot600數據幀:
一個 DShot 數據包由16位組成
11位表示油門值(2^10= 2048分辨率)
1位表示遙測請求是telemetry請求標志,tlm需要電調硬件支持
4位表示 CRC 校驗(循環冗余校驗)
速度600kbits/s,一幀信號的長度為26.7us。
對于DSHOT600,整個比特位的長度為1.67us(T0H+T0L或T1H+T1L),0的高電平時間為625ns,1的高電平時間是1250ns。
幀與幀之間需要一點間隔(2-3us),以區別不同的幀信號

11位油門值可以達到2048的分辨率,實際使用48-2047表示油門值,所以油門信號是2000的分辨率,0是上電后的默認值(鎖定值),1-47表示一些命令和設置,一些值的意義如下:
1-5:beep(1= low freq. 5 = high freq
esc信息請求(fw版本和通過tlm線發送的SN)
7:一個方向旋轉
8:另一個方向旋轉
9:3d模式關閉
10:3d模式打開
11:esc設置請求(saved settings over the TLM wire)
12:保存設置

協議之間的轉換速度轉換
固件命名:
BLHeli_S代碼除了修訂版外,還用一個字母、另一個字母和兩個數字命名。例如“A_L_10_REV16_0.HEX”。
第一個字母表示MCU的引腳;
第二個字母是L或H(L代表24MHz MCU,H代表48MHz MCU);
這兩個數字表示FET的開關死區時間。單位為20.4ns。一些場效應晶體管驅動器具有自適應場效應晶體管死區時間控制,對于這些MOS管,則用00表示場效應晶體管開關死區時間。
可設置參數
啟動功率:
啟動功率可設置為0.031到1.5之間的相對值。這是啟動期間允許的最大功率。實際應用的功率取決于節氣門輸入,可以更低,但最低電平是最高電平的四分之一。
啟動功率也會影響雙向操作,因為該參數用于限制方向反轉期間應用的功率。
對于低轉速,電機的最大功率是有限的,以便于檢測低反電勢電壓。允許的最大功率可通過啟動功率參數設置。較低的啟動功率參數將為較低轉速提供較低的最大功率(這從rev16.1開始實施)。
換向時間:
換向定時可設置為低/中低/中/中高/高,對應于00/7.50/150/22.50/300定時。
一般來說,一個中等設置將工作良好,但如果電機口吃(哥們兒不知道在說什么了)它可以是有益的改變時間。一些高電感的電機可以有很長的換相退磁時間。這可能會導致電機停止或口吃時,快速油門增加,特別是在運行在低轉速。將定時設置為高將允許更多的時間去消磁,通常是有幫助的。
消磁補償:
消磁補償是一種保護電機不因換相后較長的繞組退磁時間而失速的功能。典型的癥狀是發動機停止或快速增加油門時卡頓,特別是在低轉速運行時。如上所述,設置高換向時間通常有幫助,但以效率為代價。
消磁補償是解決這一問題的另一種方法。首先,它檢測何時出現了demag情況。
- 在這種情況下,沒有關于電機正時的信息,并且換相是盲目地以預測的正時進行的。
- 除此之外,在下一次換向前的一段時間內,電機電源被切斷。計算出一個指標,表明demag情況有多嚴重。形勢越嚴峻,越是停電。
當demag補償設置為關閉時,電源永遠不會切斷。
當設置為低或高,電源被切斷。對于高設置,斷電更為猛烈。
通常,補償參數的值越高,保護效果越好。
如果demag補償設置得太高,最大功率可能會有所降低。
方向:
旋轉方向可設置為前進/后退/雙向前進/雙向后退。
在雙向模式下,中央油門為零,上面為前進方向旋轉,下面為反向旋轉。當選擇雙向操作時,TX編程被禁用。
嘟嘟聲強度:
設置正常運行時的蜂鳴音強度。
信標強度:
設置蜂鳴信標蜂鳴時蜂鳴的強度。如果油門信號在給定時間內為零,電子懸架控制系統將開始發出蜂鳴聲。請注意,設置高信標強度可能會導致電機或ESC過熱!
信標延遲:
信標延遲設置信標嗶嗶聲開始前的延遲。
TX編程:
如果禁用,則禁用油門校準。
最小油門、最大油門和中值油門:
這些設置設置ESC的油門范圍。中央油門僅用于雙向操作。為這些設置提供的值適用于正常的1000us到2000us輸入信號,對于其他輸入信號,這些值必須按比例縮放。
熱保護:
可以啟用或禁用熱保護。溫度閾值可以在800C和1400C之間編程(可編程閾值從rev16.3開始執行)。可編程閾值主要是為了支持硬件制造商使用,因為不同的硬件可以對所使用的各種組件的最高溫度有不同的公差。
低轉速功率保護:
可以啟用或禁用低轉速的功率限制。禁用它可能是必要的,以實現在低電源電壓下運行的一些低kV電機的全功率。但是,禁用它會增加同步丟失的風險,并可能導致電機或電子穩定控制系統過熱。
停止時制動:
可以啟用或禁用制動停止。啟用時,油門為零時將應用制動器。對于非零油門,此設置無效。
LED控制:
LED可以在支持它的ESC上控制。最多可以打開或關閉4個LED。
蜂鳴器含義
100%上電時,電子穩定控制系統鳴叫3次。
當檢測到油門信號時,它會發出一聲低沉的嗶嗶聲。這表示開始警戒序列。
然后,當或如果油門為零,它會發出一聲高音嗶嗶聲。這標志著警戒序列的結束。
此外,如果在啟用順序期間檢測到100%油門,電子懸架控制系統將開始油門校準。
如果電子穩定控制系統處于待命狀態,并在給定時間內看到零油門,它會發出信標嗶嗶聲,大約每三秒發出一聲嗶嗶聲。
熱保護:
ESC測量MCU內的溫度,如果溫度過高,則限制電機功率。電機功率分四步限制:
- 如果溫度高于臨界值,電機功率限制在75%。
- 如果溫度高于閾值加上50攝氏度,電機功率限制在50%。
- 如果溫度高于閾值加上100攝氏度,電機功率限制在25%。
- 如果溫度高于閾值+150℃,則電機功率限制為0%。
失速保護:
如果電機已嘗試啟動但幾秒鐘內未成功,它將停止嘗試并等待油門歸零,然后再嘗試。
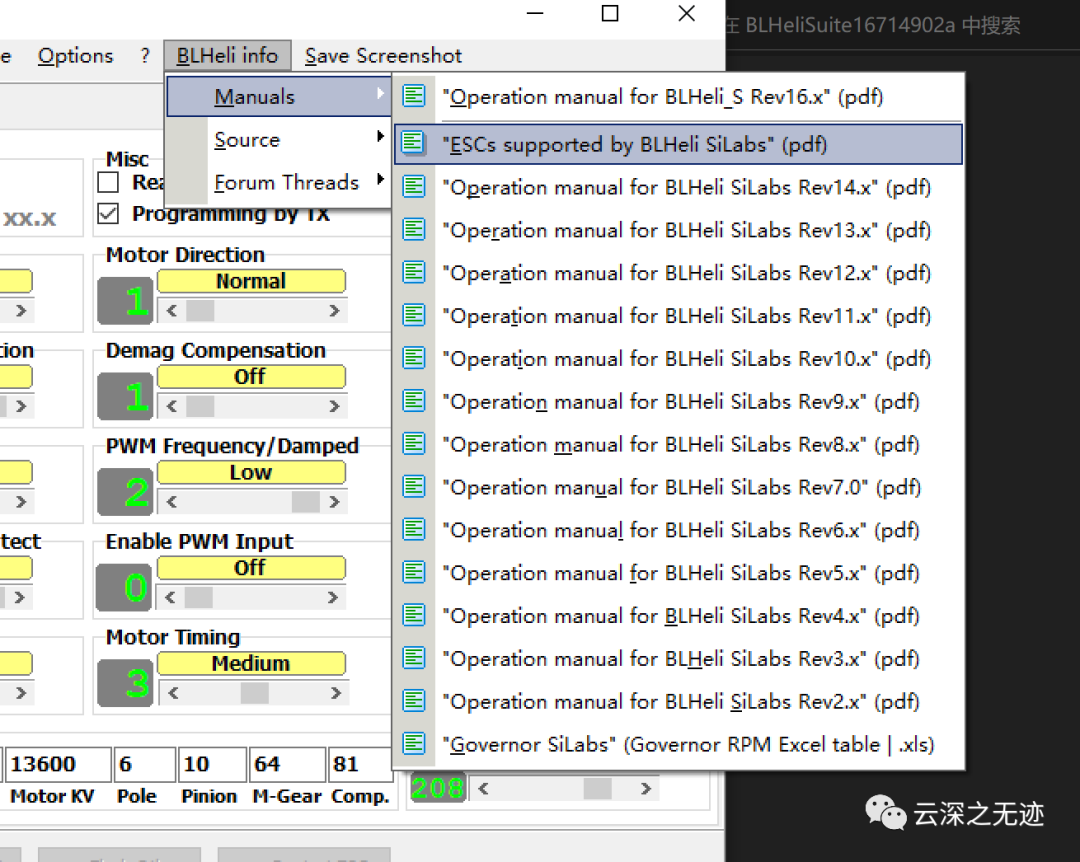
下載我們的刷機軟件以后,點擊這里就會出現一些PDF
1.BLHeli manual xx xx.pdf:Atmel MCU和SiLabs MCU的電調的參數2.BLHeli programming adapters.pdf:適配器的制作和使用3.BLHeli supported xx ESCs.pdf:支持的Atmel和SiLabs電調的圖片及參數4.BLHeliSuite 4w-if interfaces pinout.pdf:Arduino板上用于Atmel/SiLabs電調的BLHeliSuite的4w-if的引腳配置5.BLHeliSuite 4w-if protocol.pdf:用于Atmel/SiLabs電調的BLHeliSuite的4w-if的通信協議
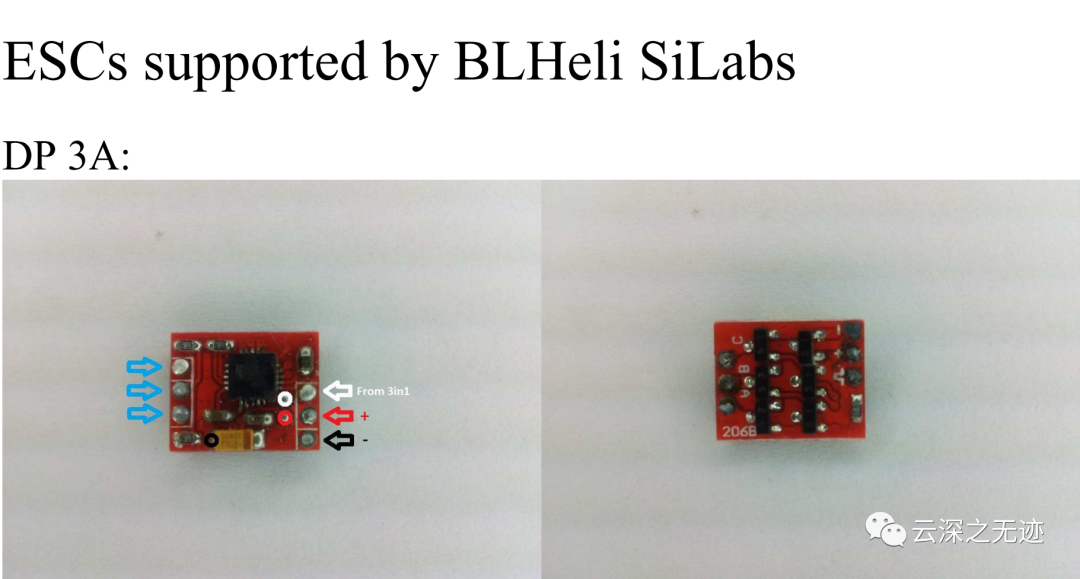
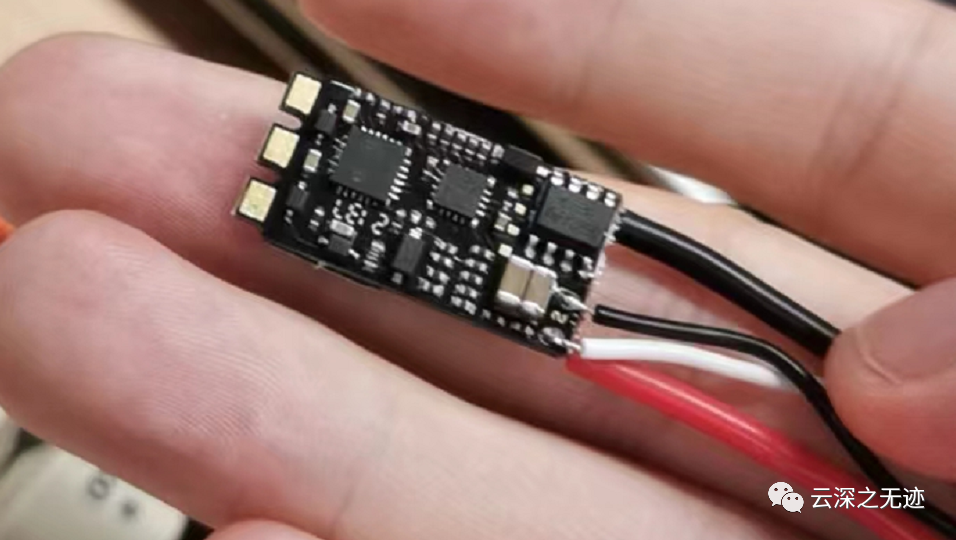
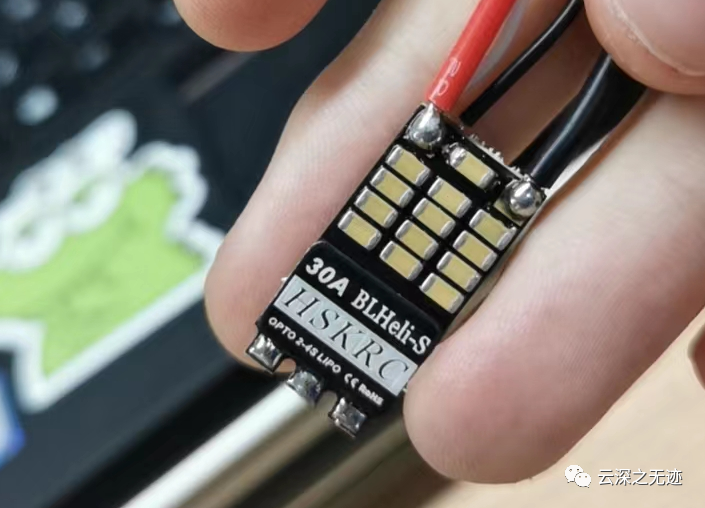
這份PDF里面展示了使用BB芯片的一些電調,但是令人傷心的事情是,我手里面的電調是找不到刷寫的金屬觸點的。
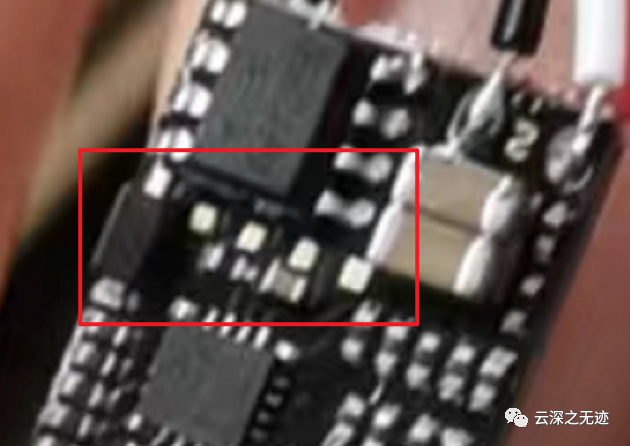
這里有4個觸點,可能是刷寫的引腳
主要是紅白兩個點
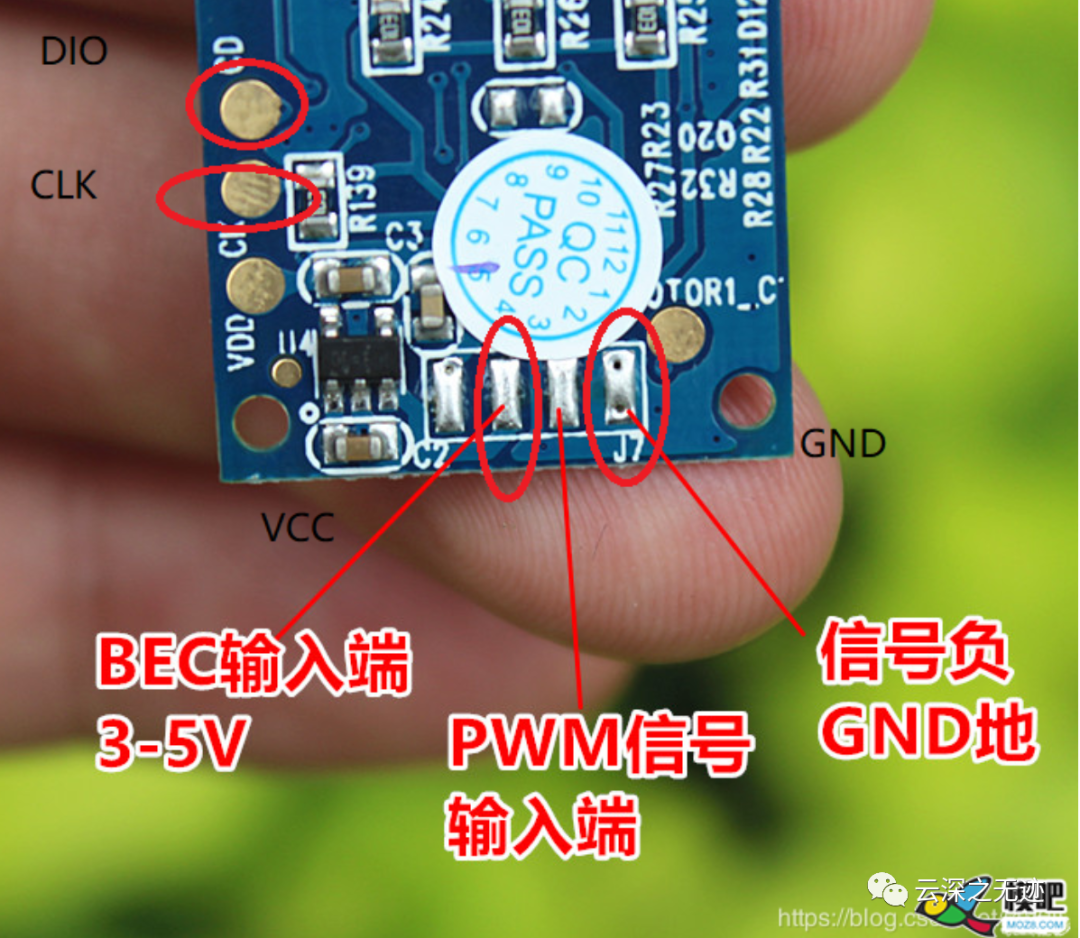
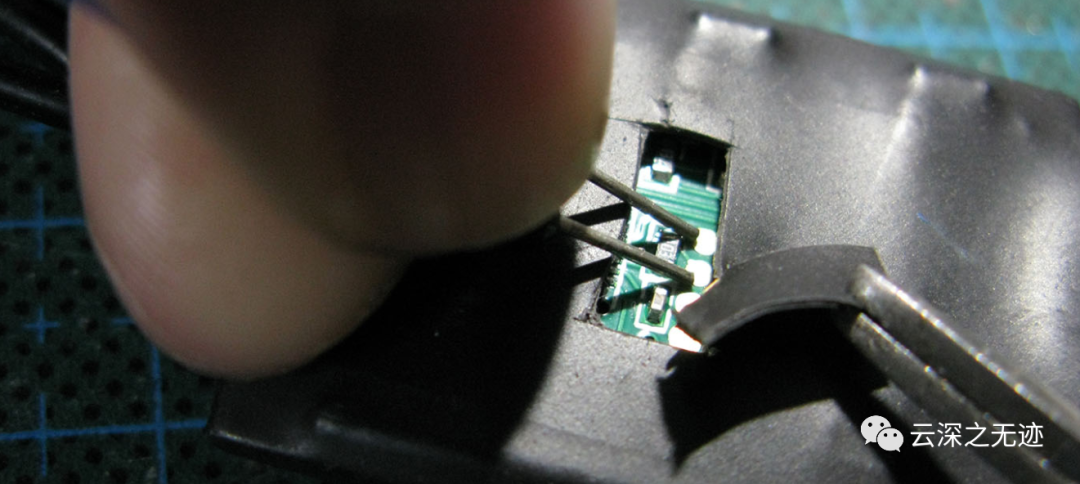
刷寫的引腳位置
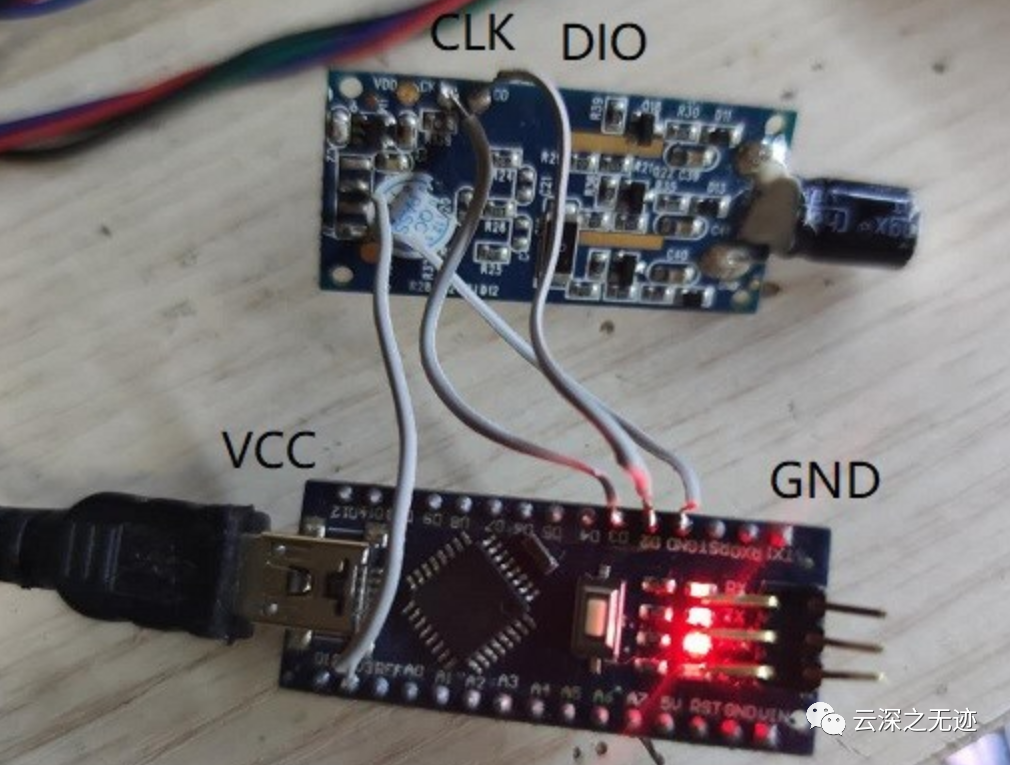
Arduino刷寫
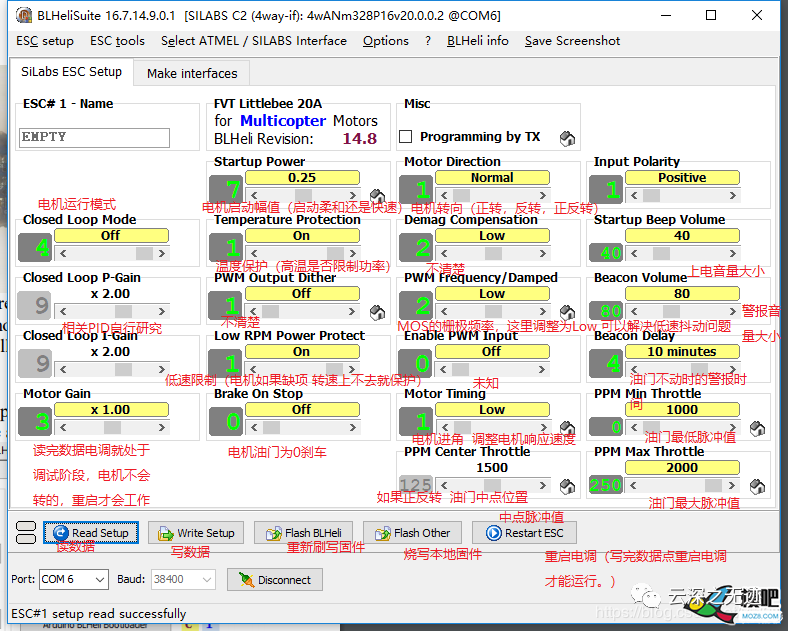
這個是調節的參數
文檔里面展示的電調的英文名字有:好盈=Hobbywing,天行者=Skywalker,銀燕=EMAX。
還是性價比很高了
不過我可能不能這么頻繁的寫文章了,因為時間有點不夠了,不過我也說不準繼續這樣更新,不管怎么說,感謝陪伴。
-
處理器
+關注
關注
68文章
19547瀏覽量
231871 -
數據
+關注
關注
8文章
7223瀏覽量
90194 -
電調
+關注
關注
0文章
29瀏覽量
13625
原文標題:HSKRC BLHeli-S 30A電調
文章出處:【微信號:TT1827652464,微信公眾號:云深之無跡】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
TLV320AIC3106有模擬電和數字電之分,現在用兩個電源獨立供電,那有沒先后之分呢?
dfrobot40A雙向有刷電調簡介

模擬開關和數字開關的區別

模擬電源和數字電源的區別
模擬電路和數字電路到底有什么區別?






 工商網監
工商網監
評論