

高光譜影像包含豐富的光譜信息,能夠準(zhǔn)確地描述地物的光譜特征,但在地物分類應(yīng)用中通常會存在同物異譜和同譜異物現(xiàn)象。機(jī)載激光雷達(dá)(LightDetectionandRanging,LiDAR)可以直接獲取地物高精度、高密度的三維空間信息,通常為離散點(diǎn)云,由于缺乏光譜/紋理信息,在地物分類方面表現(xiàn)出最大的不足。因此,融合機(jī)載LiDAR點(diǎn)云的三維空間信息和高光譜影像的紋理信息,即可發(fā)揮各自優(yōu)勢、取長補(bǔ)短,提升地物分類的精度和可信度。本文在已有研究基礎(chǔ)上從機(jī)載LiDAR數(shù)據(jù)和高光譜影像數(shù)據(jù)提取不同特征,設(shè)計了不同特征組合的融合數(shù)據(jù)集,采用效率更高、實現(xiàn)簡單的隨機(jī)森林算法(randomforest,RF)進(jìn)行地物分類研究,并進(jìn)行精度評價與對比,以提高分類精度,為土地資源利用監(jiān)測、管理提供據(jù)支持。
1數(shù)據(jù)源
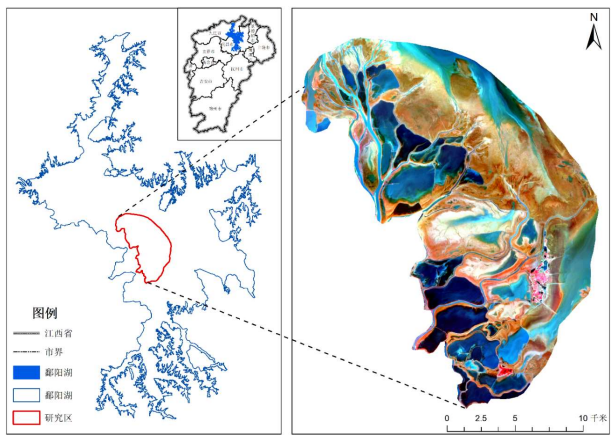
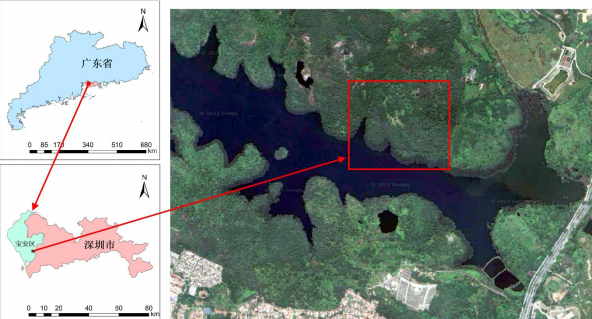
機(jī)載LiDAR和高光譜影像數(shù)據(jù)覆蓋區(qū)域位于廣西靈川縣,地形平坦,包括民房、農(nóng)田、林地、裸地等地物類型(圖1)。其中機(jī)載LiDAR數(shù)據(jù)采集于2020年11月6日,由無人機(jī)LiDAR系統(tǒng)獲取,飛行高度約120m,平均點(diǎn)密度38點(diǎn)/m2,包含xyz坐標(biāo)信息、強(qiáng)度信息及多次回波信息。高光譜數(shù)據(jù)采用高光譜成像儀于2020年12月25日獲取,當(dāng)日天氣晴好,飛行高度為130m,空間分辨率為0.12m;波長范圍為400-1000nm,包含270個光譜波段。
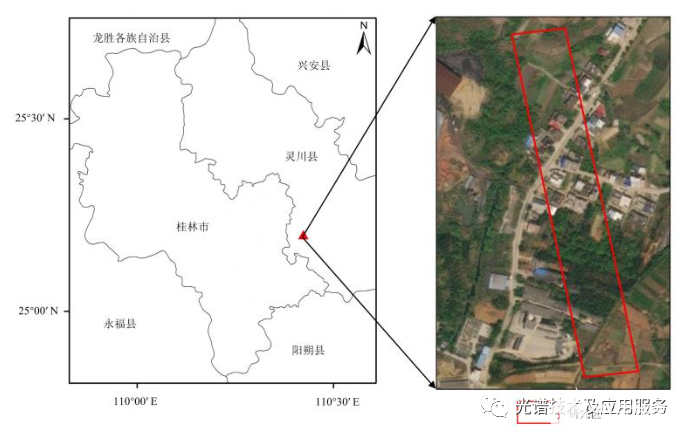
圖1實驗區(qū)地理位置
2研究方法
分別從機(jī)載LiDAR點(diǎn)云數(shù)據(jù)和高光譜影像中提取地物的高度特征、光譜特征、紅邊特征及紋理特征,并設(shè)計了5種不同特征組合的影像,然后應(yīng)用隨機(jī)森林分類器對不同特征組合的影像進(jìn)行土地利用分類,并比較其精度。技術(shù)路線如圖2。
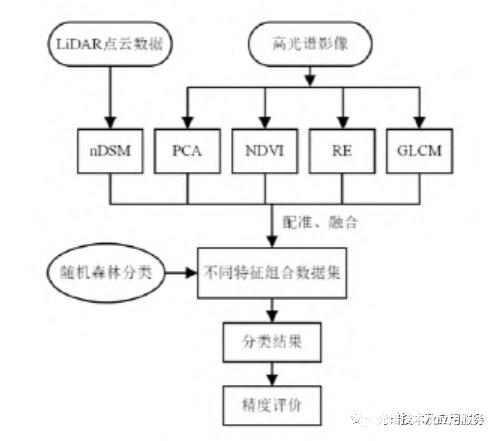
圖2技術(shù)路線圖
2.1 LiDAR點(diǎn)云特征提取
首先采用三角網(wǎng)濾波方法進(jìn)行點(diǎn)云濾波,然后采用不規(guī)則三角網(wǎng)方法(TriangulatedIrregularNetwork,TIN)對濾波后的地面點(diǎn)和非地面點(diǎn)進(jìn)行插值,生成格網(wǎng)分辨率為0.25m的數(shù)字高程模型(digitalelevationmodel,DEM)和數(shù)字表面模型(digitalsurfacemodel,DSM),將插值生成的DEM和DSM進(jìn)行差值運(yùn)算,得到nDSM。
2.2高光譜影像特征提取
高光譜影像包含豐富的地物光譜信息,波段數(shù)多,在分類過程中,會導(dǎo)致數(shù)據(jù)冗余、效率變低、影響分類精度,因此首先要對高光譜影像數(shù)據(jù)進(jìn)行降維處理。主成分分析法(principalcomponentanalysis,PCA)是目前應(yīng)用最廣泛的降維方法,在ENVI5.3中對高光譜數(shù)據(jù)進(jìn)行降維處理,選取前5個主成分波段特征。利用紅邊波段可以增強(qiáng)不同地物間的區(qū)分度,本文根據(jù)所用高光譜影像的光譜特點(diǎn),定義了3種紅邊植被指數(shù),組成紅邊特征集(后文以RE表示)。歸一化植被指數(shù)(normalizeddifferencevegetationindex,NDVI)對綠色植被比較敏感,也是遙感影像分類中常用的植被指數(shù)。各植被指數(shù)計算公式如表1所示。
表1植被指數(shù)

注:NIR為近紅外波段;R為紅波段;RE1為紅邊710波段;RE2為紅邊750波段
紋理特征信息能夠有效提升分類精度,本文采用灰度共生矩陣(gray-levelco-occurrencematrix,GLCM)方法提取影像的紋理特征,并選取了同質(zhì)度、非相似性、對比度、相關(guān)性、熵和角二階矩作為影像的紋理特征,對經(jīng)PCA變換后的影像進(jìn)行GLCM計算得到紋理特征。
2.3分類方法
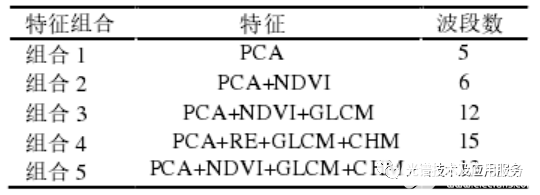
首先使用ENVI5.3軟件,以高光譜影像為基準(zhǔn)影像,選取nDSM和高光譜影像上明顯的同名地物點(diǎn)作為配準(zhǔn)基元進(jìn)行配準(zhǔn)。為探究不同特征組合的分類效果,本文根據(jù)提取的不同特征,設(shè)計了5個特征組合的融合影像,如表2所示。
表2不同特征波段組合
隨機(jī)森林是一種機(jī)器學(xué)習(xí)算法,它將多棵決策樹集成在一起組成“森林”是目前遙感影像分類常用的方法,具有參數(shù)設(shè)置少、穩(wěn)定性好、訓(xùn)練樣本速度快、分類精度高等特點(diǎn)。本文根據(jù)實地調(diào)查數(shù)據(jù)和通過Googleearth高分辨率影像目視解譯完成訓(xùn)練樣本和驗證樣本的選擇,使用RF分類器,對構(gòu)建的不同特征組合進(jìn)行地物分類。在隨機(jī)森林算法中,決策樹的數(shù)量(ntree)和為隨機(jī)特征的數(shù)量(mtry)是兩個關(guān)鍵參數(shù),本文通過反復(fù)優(yōu)化,將ntree設(shè)置為100,mtry設(shè)為特征數(shù)量的平方根。
2.4精度評價
采用Kappa系數(shù)和總體分類精度(OverallClassificationAccuracy,OA)對分類結(jié)果進(jìn)行精度評價。并計算每種地物類別的用戶精度和生產(chǎn)者精度,以便更好地評價不同實驗組合的分類結(jié)果。
3 結(jié)果與分析不同特征組合的分類結(jié)果如圖3所示。可以看出,在融合影像僅具有光譜特征時(組合1),部分建筑物明顯被誤分為了道路和裸地。在加入植被指數(shù)和紋理特征后(組合3),植被和裸地的區(qū)分更明顯,建筑物誤分為道路的情況也有所改善,但仍有部分裸地被分為了建筑物;加入LiDAR點(diǎn)云數(shù)據(jù)提取的nDSM后,融合影像(組合4)具有了高度特征,建筑物和道路邊緣區(qū)分更清晰,建筑物和裸地的誤分情況相較于組合3也有極大改善,林地、農(nóng)作物和裸地的區(qū)分也更明顯。
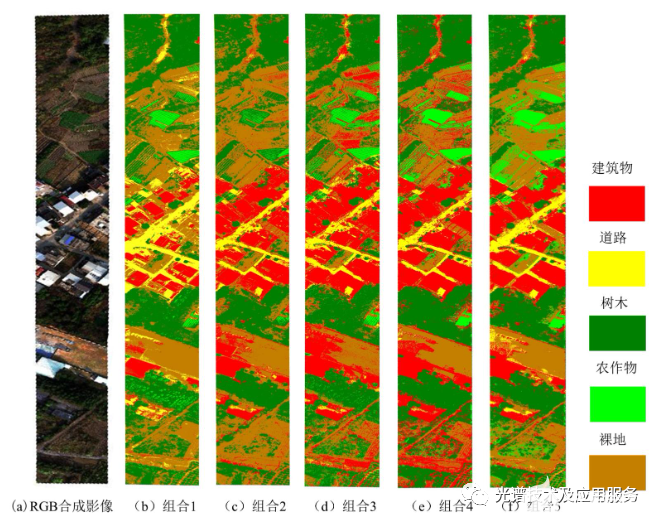
圖3不同特征組合分類結(jié)果
表3分類結(jié)果精度統(tǒng)計
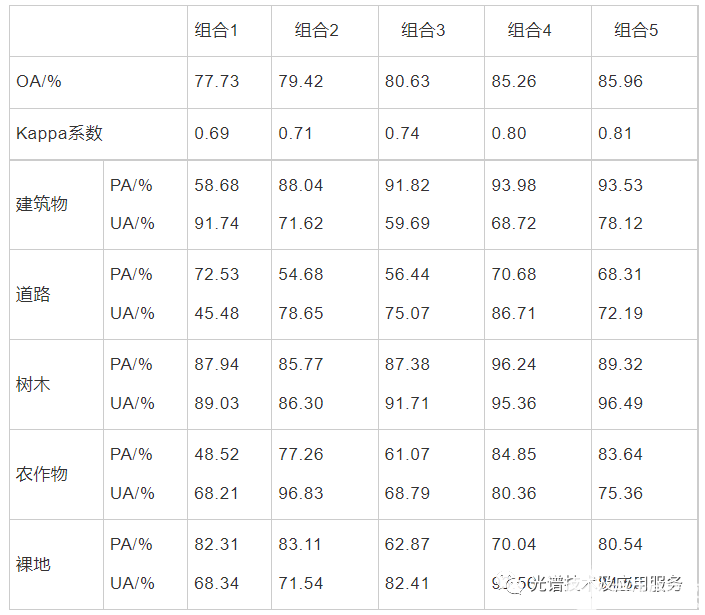
注:PA為生產(chǎn)者精度;UA為用戶精度
從表3可以看出,組合1的分類精度最低,OA和Kappa系數(shù)分別為77.73%和0.69;組合5的分類精度最高,OA和Kappa系數(shù)分別為85.96%、0.81,說明高光譜影像融合植被指數(shù)、紋理特征和高度特征后,分類精度得到有效提升。特別在添加了LiDAR點(diǎn)云數(shù)據(jù)提取的nDSM的高度特征后,分類精度提升最多,相較于未添加高度特征(組合3)OA和Kappa系數(shù)分別提升了5.33%和0.07,說明融合高程信息可以極大提高高光譜數(shù)據(jù)的分類精度;組合4的總體分類精度雖略低于組合5,但組合4中林地的分類精度卻更高,PA和UA均達(dá)到95%以上,說明紅邊光譜特征與從LiDAR數(shù)據(jù)提取的nDSM融合后對高植被的分類效果更好。
審核編輯 黃昊宇
-
高光譜圖像
+關(guān)注
關(guān)注
0文章
25瀏覽量
7230 -
LIDAR
+關(guān)注
關(guān)注
10文章
328瀏覽量
29880
發(fā)布評論請先 登錄
相關(guān)推薦
如何利用高光譜相機(jī)實現(xiàn)精確的光譜分析?
高光譜相機(jī)+LED光源系統(tǒng)助力材料分類和異物檢測、實現(xiàn)高速在線檢測

如何利用地物高光譜進(jìn)行空氣質(zhì)量監(jiān)測?
如何利用地物光譜進(jìn)行土地利用分類?
無人機(jī)高光譜影像與冠層樹種多樣性監(jiān)測
無人機(jī)機(jī)載高光譜成像系統(tǒng)的應(yīng)用及優(yōu)勢
基于高光譜影像的南磯濕地光譜特征分析1.0
基于高光譜數(shù)據(jù)的典型地物分類識別方法研究

高光譜成像系統(tǒng):高光譜遙感圖像的光譜混合模型
便攜式高光譜成像系統(tǒng):巖礦高光譜遙感
基于無人機(jī)高光譜遙感的荒漠化草原地物分類研究2.0
基于無人機(jī)高光譜遙感的荒漠化草原地物分類研究1.0
高光譜成像光源 實現(xiàn)對細(xì)微色差的分類
高光譜成像系統(tǒng):深度學(xué)習(xí)機(jī)載高光譜影像樹種分類研究
高光譜成像技術(shù):從原理到應(yīng)用的全面指南





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論