") 動(dòng)態(tài)無功補(bǔ)償裝置控制系統(tǒng)設(shè)計(jì)
動(dòng)態(tài)無功補(bǔ)償裝置控制系統(tǒng)設(shè)計(jì)
摘 要:
從控制系統(tǒng)分層結(jié)構(gòu)、通信協(xié)議、各層控制策略及控制算法角度出發(fā),設(shè)計(jì)出了一種新型動(dòng)態(tài)無功補(bǔ)償裝置控制系統(tǒng),并利用仿真分析證明了該設(shè)計(jì)方法是有效的。
0 引言
在西電東送的背景下,廣東地區(qū)作為受電端,容易出現(xiàn)多直流饋入及交直流電混聯(lián)運(yùn)行的狀況。因?yàn)閰^(qū)域內(nèi)負(fù)荷特性明顯,電源比例較低,無功電源嚴(yán)重不足,電壓支撐能力較弱,所以局部地區(qū)無功功率不足的問題特別突出。另外,電網(wǎng)運(yùn)行方式、負(fù)荷率、輸電出線、設(shè)備損耗等都會(huì)影響電網(wǎng)無功功率平衡水平,繼而引起電壓波動(dòng)。而作為經(jīng)濟(jì)較發(fā)達(dá)地區(qū),特別是廣州、深圳的電網(wǎng)存在較多高供電可靠性、高電能質(zhì)量需求的用戶,那么在減少用戶停電時(shí)間,提高用戶端電壓合格率的同時(shí),還必須有效地應(yīng)對(duì)日益突出的諧波、閃變、驟降等動(dòng)態(tài)電壓質(zhì)量問題。為解決上述問題,需設(shè)計(jì)一種能快速、動(dòng)態(tài)地提供無功的無功補(bǔ)償裝置,以支撐電網(wǎng)電壓,使電網(wǎng)恢復(fù)正常運(yùn)行。
動(dòng)態(tài)無功補(bǔ)償裝置SVG是一種能夠快速實(shí)時(shí)跟蹤負(fù)荷無功功率變化的無功補(bǔ)償裝置,它的特點(diǎn)在于:(1)能夠自動(dòng)跟蹤控制目標(biāo),改善電力系統(tǒng)功率因數(shù),減小功率損耗;(2)能夠快速調(diào)整電網(wǎng)無功,以防止過電壓和欠電壓;(3)能夠補(bǔ)償快速變化的電壓波動(dòng),減少電壓閃變;(4)能夠抑制低頻振蕩及次同步振蕩,提升電力系統(tǒng)穩(wěn)定性;(5)能夠利用調(diào)諧濾波、有源濾波抑制諧波;(6)當(dāng)系統(tǒng)負(fù)荷不平衡時(shí),可以通過無功補(bǔ)償,使三相有功功率與無功功率達(dá)到動(dòng)態(tài)平衡。
基于上述電網(wǎng)存在的問題及動(dòng)態(tài)無功功率補(bǔ)償特性,本文研發(fā)了一種新型動(dòng)態(tài)無功補(bǔ)償裝置控制系統(tǒng),在受端電網(wǎng)中實(shí)施動(dòng)態(tài)無功補(bǔ)償,按“小容量多布點(diǎn)”配置,能減少無功異地輸送,降低線損,保證電壓穩(wěn)定,提高電網(wǎng)可靠性。
1動(dòng)態(tài)無功補(bǔ)償裝置控制系統(tǒng)設(shè)計(jì)
新型動(dòng)態(tài)無功補(bǔ)償裝置控制系統(tǒng)采用三層分層架構(gòu)[1],分別為站級(jí)控制層、裝置控制層、閥控制層,如圖1所示。站級(jí)控制層依據(jù)電網(wǎng)調(diào)度指令,實(shí)現(xiàn)對(duì)裝置的啟動(dòng)/停止、控制模式的選擇、系統(tǒng)參數(shù)調(diào)節(jié)等,還可根據(jù)系統(tǒng)狀態(tài)和測(cè)試需求,選擇多種控制模式。裝置控制層可監(jiān)測(cè)功率元件及輔助設(shè)備工作狀態(tài),針對(duì)站級(jí)控制層下發(fā)的指令,產(chǎn)生電流參考值。裝置控制層可采用分相瞬時(shí)電流跟蹤控制策略、有源濾波、正負(fù)序分離控制策略等。閥控制層采用移相載波PWM調(diào)制和死區(qū)時(shí)間補(bǔ)償控制策略。該控制系統(tǒng)層級(jí)清晰,保證了動(dòng)態(tài)無功補(bǔ)償裝置在復(fù)雜工況下能安全穩(wěn)定工作。
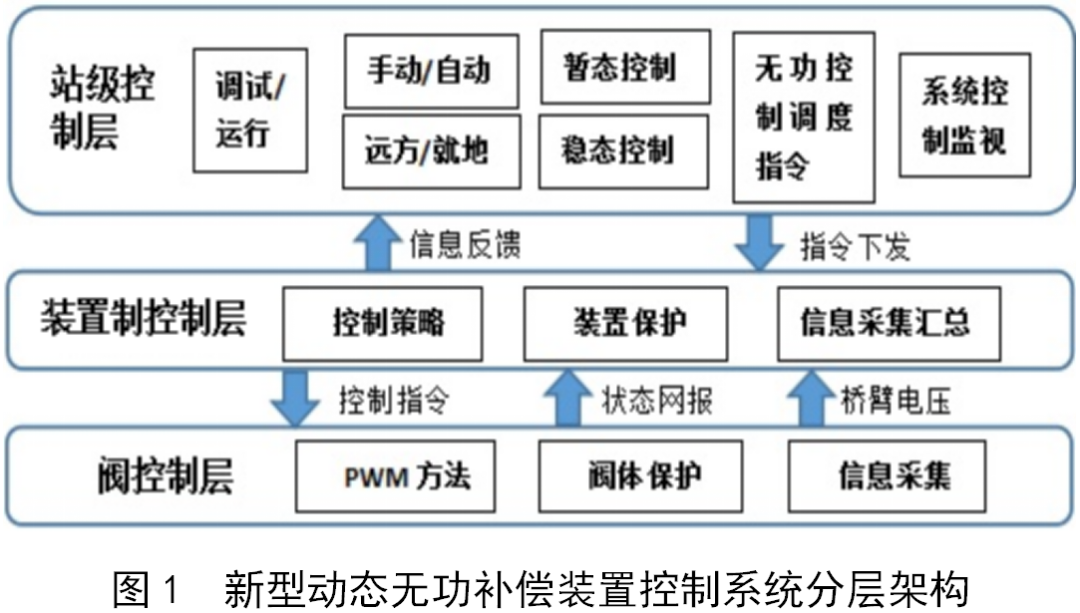
站級(jí)控制層、裝置控制層、閥控制層采用國際標(biāo)準(zhǔn)IEC 61850,該標(biāo)準(zhǔn)為變電站數(shù)字化監(jiān)控系統(tǒng)現(xiàn)行標(biāo)準(zhǔn),具有面向電力系統(tǒng)對(duì)象統(tǒng)一建模、通信服務(wù)接口、實(shí)時(shí)服務(wù)、配置語言等特點(diǎn)。在站級(jí)控制層和裝置控制層間通信網(wǎng)絡(luò)采用MMS報(bào)文規(guī)范及TCP/IP以太網(wǎng)或光纖網(wǎng),裝置控制層和閥控制層間通信網(wǎng)絡(luò)采用GOOSE模型報(bào)文規(guī)范及以太網(wǎng)。智能電子設(shè)備通過網(wǎng)絡(luò)進(jìn)行信息交換,具有與變電站自動(dòng)化系統(tǒng)之間的互操作性和協(xié)議轉(zhuǎn)換性,方便系統(tǒng)的集成,降低自動(dòng)化系統(tǒng)運(yùn)行、監(jiān)視、診斷和維護(hù)等工程費(fèi)用。
2動(dòng)態(tài)無功補(bǔ)償裝置控制系統(tǒng)的原理
控制系統(tǒng)通過測(cè)量電壓、電流等電氣量,并進(jìn)行相應(yīng)運(yùn)算,判斷動(dòng)態(tài)無功補(bǔ)償控制系統(tǒng)工作狀態(tài),選擇動(dòng)態(tài)無功補(bǔ)償控制模式,由站級(jí)控制層、裝置控制層和閥控制層按照各自職能控制功率元件,或者通過人機(jī)界面選取控制模式、設(shè)定控制系統(tǒng)的參數(shù),然后進(jìn)行相應(yīng)的控制。
2.1站級(jí)控制層控制策略
站級(jí)控制層主要功能有:(1)對(duì)內(nèi)啟動(dòng)或關(guān)停動(dòng)態(tài)無功補(bǔ)償裝置控制系統(tǒng),選擇調(diào)試或運(yùn)行、手動(dòng)或自動(dòng)、遠(yuǎn)方或就地、暫態(tài)或穩(wěn)態(tài)等控制模式,并對(duì)動(dòng)態(tài)無功補(bǔ)償裝置進(jìn)行監(jiān)視;(2)對(duì)外接收上級(jí)系統(tǒng)無功控制調(diào)度指令,并對(duì)上級(jí)調(diào)度系統(tǒng)或監(jiān)控中心發(fā)送動(dòng)態(tài)無功補(bǔ)償裝置運(yùn)行及告警信號(hào)。站級(jí)控制層控制模式有穩(wěn)態(tài)控制模式、遠(yuǎn)方控制模式、暫態(tài)控制模式等。
2.1.1穩(wěn)態(tài)控制模式
穩(wěn)態(tài)控制模式[2]涵蓋調(diào)試模式和運(yùn)行模式,調(diào)試模式有恒無功/恒電流控制,用于SVG調(diào)試;運(yùn)行模式有系統(tǒng)無功、恒電壓和阻尼控制等。每種控制模式以不同控制量為目標(biāo),執(zhí)行各自的控制策略。其中恒電壓控制可與電容器組和電抗器組協(xié)調(diào)工作,阻尼控制能提供一定阻尼裕度,參與電力系統(tǒng)的穩(wěn)定控制。
2.1.2遠(yuǎn)方控制模式
站級(jí)控制層在遠(yuǎn)方控制模式下接收調(diào)度中心或變電站AVC主控單元的無功指令,該指令直接作為動(dòng)態(tài)無功補(bǔ)償裝置的無功參考值。
2.1.3暫態(tài)控制模式
站級(jí)控制層在選擇啟用暫態(tài)控制模式時(shí),控制系統(tǒng)采集模塊采集相應(yīng)電氣量,處理模塊采用快速檢測(cè)算法對(duì)系統(tǒng)電壓進(jìn)行分析,判斷系統(tǒng)是否存在暫態(tài)擾動(dòng),并確定是否轉(zhuǎn)入暫態(tài)控制模式,發(fā)出相應(yīng)指令。
2.2裝置控制層控制策略
裝置控制層根據(jù)站級(jí)控制層下達(dá)控制指令,轉(zhuǎn)入控制模式。它解決了控制系統(tǒng)傳遞函數(shù)的實(shí)現(xiàn)問題,決定了SVG的穩(wěn)定性、穩(wěn)態(tài)特性和動(dòng)態(tài)特性;同時(shí)裝置控制層是動(dòng)態(tài)無功補(bǔ)償裝置的保護(hù)及監(jiān)視設(shè)備,是整個(gè)控制系統(tǒng)的核心部分。為解決SVG的輸出電壓未及時(shí)調(diào)整而出現(xiàn)過流和各橋功率元件的參數(shù)不盡相同而引起三相電流不對(duì)稱的問題,提出了分相瞬時(shí)電流跟蹤控制策略;為消除SVG噪聲的影響,采用有源濾波策略;為應(yīng)對(duì)電力系統(tǒng)故障時(shí)不對(duì)稱故障,在采用分相瞬時(shí)電流跟蹤控制外,提出了不平衡運(yùn)行時(shí)的正負(fù)序分離控制策略。
2.2.1分相瞬時(shí)電流跟蹤控制策略
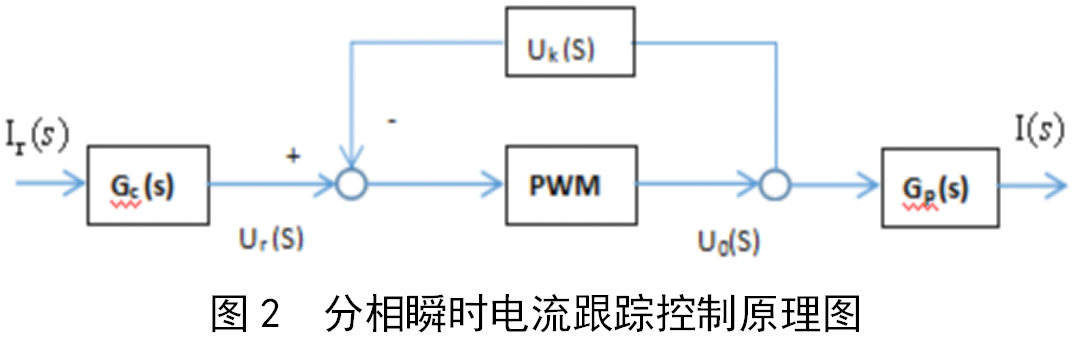
分相瞬時(shí)電流跟蹤控制具有響應(yīng)速度快、適應(yīng)性強(qiáng)、能快速跟蹤負(fù)荷電流變化的特點(diǎn),能提高SVG承受沖擊的能力,降低對(duì)電壓突變的敏感性,提高SVG可靠性。分相瞬時(shí)電流跟蹤控制核心算法是求解無功補(bǔ)償分量的旋轉(zhuǎn)變換和補(bǔ)償電流參考值的反旋轉(zhuǎn)變換,當(dāng)相位突變不大時(shí),對(duì)生成的參考信號(hào)影響很小,能夠?qū)崟r(shí)反映負(fù)荷電流的真實(shí)變化。
設(shè)u0為逆變器輸出電壓,uk為逆變器接入點(diǎn)電壓,L、R為逆變器單相連接電抗和等效電阻,采用單相模型:

分相瞬時(shí)電流跟蹤控制原理圖如圖2所示。
其中:
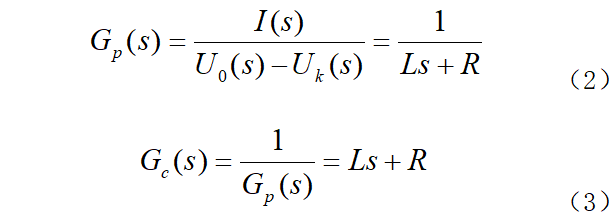
忽略諧波影響,輸出電流I(s)為:

即分相瞬時(shí)電流跟蹤控制電流控制的目標(biāo)是使輸出電流I(s)緊跟參考電流Ir(s)。
2.2.2 有源濾波策略
由于傳遞函數(shù)是比例微分環(huán)節(jié),容易受到噪聲的影響,可采用有源濾波去除噪聲。SVG控制系統(tǒng)通過諧波和無功電流檢測(cè)電路,運(yùn)算檢測(cè)出補(bǔ)償對(duì)象電流中的諧波電流分量,計(jì)算出補(bǔ)償電流。SVG產(chǎn)生補(bǔ)償電流,與諧波電流抵消,最終得到期望的電流值。
2.2.3 不平衡運(yùn)行時(shí)的正負(fù)序分離控制策略
在不對(duì)稱方式下,為了有效控制輸出電流,避免裝置發(fā)生過流故障,設(shè)計(jì)了正負(fù)序分離的控制策略。當(dāng)系統(tǒng)電壓不平衡時(shí),幅值和相位都有可能發(fā)生變化,無法直接從測(cè)量的系統(tǒng)電壓獲得同步角,控制系統(tǒng)構(gòu)造一個(gè)頻率為50 Hz、起始角為0°的虛擬同步角,并把它作為電壓、電流dq變換的旋轉(zhuǎn)角,分離出正負(fù)序分量,然后由SVG輸出部分負(fù)序電流以維持平衡。
一般不平衡電壓表示如下:

式中:相電壓ua、ub、uc是電力線對(duì)中性點(diǎn)的電壓;ua1、ub1、uc1和、、ua2、ub2、uc2分別為系統(tǒng)電壓的正、負(fù)序分量。
SVG為了在故障期和恢復(fù)期平穩(wěn)運(yùn)行,在故障發(fā)生后滿發(fā)無功功率,同時(shí)還通過正負(fù)序分離控制策略輸出部分負(fù)序電流,以維持裝置自身的平衡。
2.3 閥控制層控制策略
閥控制層根據(jù)裝置控制層下達(dá)參考指令,用特定的PWM方法,計(jì)算死區(qū)時(shí)間、最小開通時(shí)間和最小關(guān)斷時(shí)間,產(chǎn)生控制脈沖,以調(diào)節(jié)功率元件開關(guān),實(shí)現(xiàn)SVG輸出,這里采用二電平SPWM調(diào)制模式和死區(qū)時(shí)間補(bǔ)償控制策略。
3 仿真分析
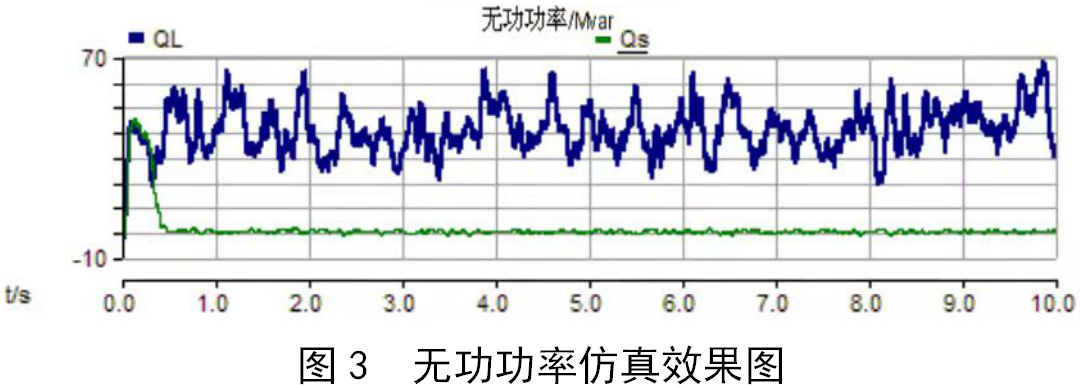
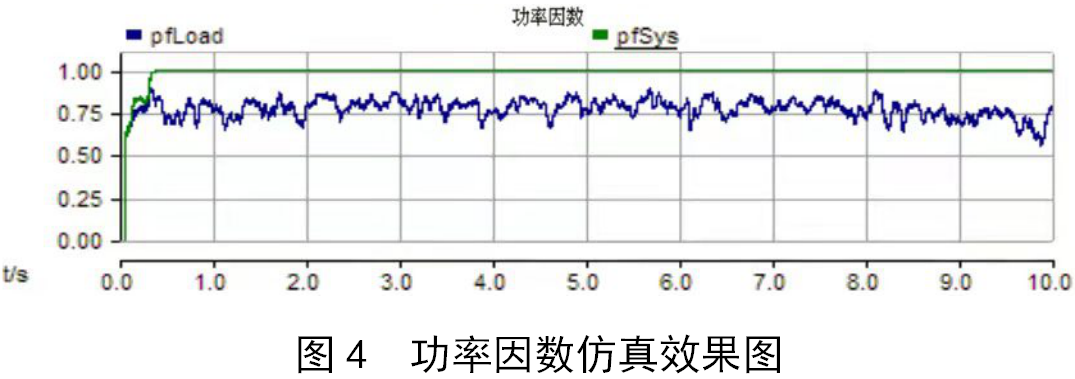
為了證明該新型動(dòng)態(tài)無功補(bǔ)償裝置控制系統(tǒng)設(shè)計(jì)的有效性,選擇系統(tǒng)無功控制方式進(jìn)行仿真,仿真對(duì)象為某220 kV變電站,控制目標(biāo)值為220 kV側(cè)功率因數(shù)1.0,仿真結(jié)果如圖3、圖4所示。當(dāng)負(fù)荷變化較大時(shí),系統(tǒng)無功功率波動(dòng)也較大,新型SVG能實(shí)時(shí)快速地提供無功,使系統(tǒng)變電站無功接近于0,功率因數(shù)穩(wěn)定地提升到1.0。
4 結(jié)語
本文從控制系統(tǒng)分層結(jié)構(gòu)、通信規(guī)約、控制策略及控制算法角度出發(fā),設(shè)計(jì)了一種新型動(dòng)態(tài)無功補(bǔ)償裝置控制系統(tǒng),并提出了分相瞬時(shí)電流跟蹤控制策略和不平衡運(yùn)行時(shí)的正負(fù)序分離控制策略解決三相系統(tǒng)不對(duì)稱問題,仿真結(jié)果證明,該新型動(dòng)態(tài)無功補(bǔ)償控制器設(shè)計(jì)方法是有效的。
END
審核編輯 :李倩
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6623瀏覽量
110627 -
補(bǔ)償裝置
+關(guān)注
關(guān)注
3文章
21瀏覽量
7562
原文標(biāo)題:一種新型動(dòng)態(tài)無功補(bǔ)償裝置控制系統(tǒng)研究
文章出處:【微信號(hào):機(jī)電信息雜志,微信公眾號(hào):機(jī)電信息雜志】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
動(dòng)態(tài)無功補(bǔ)償的三個(gè)必要條件

低壓交流系統(tǒng)無功補(bǔ)償通常采用哪種補(bǔ)償裝置

動(dòng)態(tài)補(bǔ)償裝置有沒有濾波功能
靜態(tài)無功補(bǔ)償與動(dòng)態(tài)無功補(bǔ)償的區(qū)別
無功補(bǔ)償隨機(jī)補(bǔ)償和隨器補(bǔ)償的區(qū)別

無功補(bǔ)償裝置的安裝方式
港口無功補(bǔ)償裝置配置應(yīng)用

常見的無功補(bǔ)償裝置有哪些
無功補(bǔ)償裝置總?cè)萘吭趺此?/a>
動(dòng)態(tài)無功補(bǔ)償裝置的三種運(yùn)行模式





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論