 請問一下$err故障變量該如何使用呢?
請問一下$err故障變量該如何使用呢?
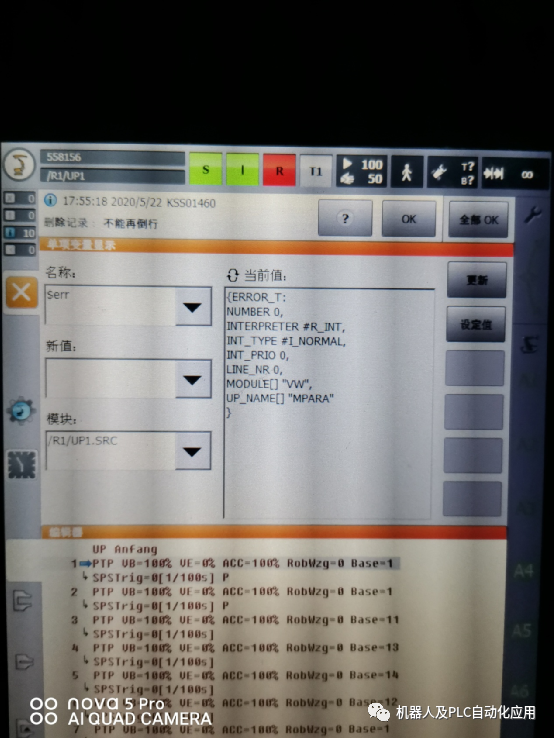
$ err
具有有關當前程序信息的結構
該變量可用于評估相對于提前運行的當前執行程序。例如,該變量可用于評估程序中的錯誤,以便能夠使用適當的故障服務功能對其進行響應。
該變量具有寫保護,只能被讀取。
該變量可用于評估相對于提前運行的當前執行程序。例如,該變量可用于評估程序中的錯誤,以便能夠使用適當的故障服務功能對其進行響應。
該變量具有寫保護,只能被讀取。
$ ERR對于機器人和提交解釋器是分別存在的。每個解釋器只能訪問其自己的變量。對于命令解釋器,$ ERR不存在。
每個子程序級別都有其自己的$ ERR表示形式。這樣,來自一個級別的信息不會覆蓋來自不同級別的信息,并且可以同時從不同級別讀取信息。
ON_ERROR_PROCEED在當前解釋器和當前級別從$ ERR隱式刪除信息。
$ERR=Information
信息類型:Error_T
列出有關當前正在執行的程序的信息.
STRUC Error_T INT number, PROG_INT_E interpreter, INT_TYP_E int_type, INT int_prio, line_nr, CHAR module[24], up_name[24], TRIGGER_UP_TYPE trigger_type
Number:發生運行時錯誤時的消息編號。如果未發生錯誤,則顯示零值。
Interpreter:當前解釋器?
#R_INT:機器人解釋器
?#S_INT:提交解釋器
int_type當前圖片類型和中斷狀態
?#I_NORMAL:該程序不是中斷程序。
?#I_INTERRUPT:該程序為中斷程序。
?#I_STOP_INTERRUPT:通過$ STOPMESS中斷(錯誤停止)
int_prio中斷優先級
?1,2,4…39
?81…128
line_nr當前程序中的行號
module[]當前程序的目錄和名稱
up_name[]當前子程序的目錄和名稱
trigger_type
觸發屬于子程序的觸發器的上下文
?#TRG_NONE:該子程序不是觸發子程序。
?#TRG_REGULAR:在向前運動期間切換了觸發器子程序。
?#TRG_BACKWARD:觸發子程序在向后運動期間被切換。
?#TRG_RESTART:觸發子程序已打開,切換回正向運動。
?#TRG_REPLAY:觸發子程序在向后運動后反復切換。
注意:此組件在KUKA System Software 8.3或更高版本中可用。
如何使用呢?
1.ERR_RAISE() 的示例:
如果不想不輸出所有可能存在的運行時間錯誤信息,而是只不輸出特定的信息,則可以通過 SWITCH … ENDSWITCH 進行該區分。在該示例中只不輸出信息 1422。可能存在的其他運行時間錯誤信息將顯示。
1 DEF myProg ()
2 DECL E6POS myPos
3 INI
4 ON_ERROR_PROCEED
5 myPos = $POS_INT
行 5 將觸發信息 1422 {$ 變量 } 值無效 。(此外由中斷調用該程序。)
6 SWITCH ($ERR.NUMBER) 情況區分取決于 $ERR.NUMBER獲取機器人故障號
7 CASE 0
如果在行 5 中未出現錯誤,則 $ERR.NUMBER==0。在這種情況下不需要任何操作。
8 CASE 1422
如果觸發了信息 1422,則 $ERR.NUMBER==1422。在需要時可以編程設定一個錯誤策略。
9 ;在需要時編程設定錯誤策略
...
10 DEFAULT
11 ERR_RAISE ($ERR)
如果觸發了一個不同于 1422 的信息,則現在 (隨后)通過 ERR_RAISE 輸出該信息。
12 ENDSWITCH
...
13 END
2.ON_ERROR_PROCEED的示例:
1 DEF myMainProg ()
2 INT myVar, myVar2
3 INI
4 ON_ERROR_PROCEED
行 5 觸發信息 1422 {$ 變量 } 值無效 ,因為 myVar 未安裝,因此無法將其傳輸給子程序。該行中的 ON_ERROR_PROCEED 事先抑制錯誤信息。
5 mySubProg (myVar)
6 HALT
如果在此通過變量修正讀取 $ERR,則以下分量具有以下值:$ERR.number == 1422/$ERR.line_nr == 15/$ERR.module[] == "MYMAINPROG"/ $ERR.up_name[] == "MYMAINPROG".
3.$ ERR不僅可以用于錯誤處理,還可以用于確定當前環境。
在此示例中,參數從機器人程序和提交程序都轉換為子程序。在子程序中,系統確定參數來自哪個解釋器。所執行的操作取決于結果。
機器人程序:
GLOBALDEF mySUB (par:IN)
INTpar
INI
IF($ERR.INTERPRETER==#R_INT) THEN -如果故障時機器人解釋器-發出輸出
$OUT_C[par]= TRUE
ELSE
$OUT[par]= TRUE
ENDIF
...
END

審核編輯:劉清
-
機器人
+關注
關注
211文章
28445瀏覽量
207204 -
觸發器
+關注
關注
14文章
2000瀏覽量
61165 -
解釋器
+關注
關注
0文章
103瀏覽量
6518
原文標題:$err 故障變量的用法
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
請問一下TLV320aic33的驅動配置需要什么條件呢?
伺服驅動器err13故障原因怎么解決
請問訪問XMC4400的FW_TRACE_ERR (63H) 的JTAG指令是什么?
請問頭文件能不能定義變量呢?
工控主板發生故障該怎么辦?
請問一下spice仿真怎么產生時鐘信號呢?
萌新想請問一下各位佬關于pcb布線的一些問題!!
請問下位機與上位機如何保持時鐘同步呢?
如何使用GPT監控變量





 工商網監
工商網監
評論