") 各種典型諧波源的時(shí)域模型建模方法
各種典型諧波源的時(shí)域模型建模方法
摘 要:
如今配電網(wǎng)的電力電子化趨勢日益明顯,因此超高次諧波對配電網(wǎng)各種元件的影響引起了人們的重視,而超高次諧波產(chǎn)生的根源在于諧波源中的電力電子器件采用了脈寬調(diào)制技術(shù)。鑒于此,從拓?fù)浣Y(jié)構(gòu)、調(diào)制方式、控制策略出發(fā),建立了能反映實(shí)際工作負(fù)荷超高次諧波特性的諧波源模型,并以此為基礎(chǔ)建立了超高次諧波有源配電網(wǎng)仿真模型。
0
引言
隨著配電網(wǎng)的電力電子化程度越來越高,超高次諧波的發(fā)射特性以及傳遞特性逐漸引起了人們的關(guān)注[1]。因?yàn)槌叽沃C波產(chǎn)生的根源,在于諧波源中電力電子裝置采用了脈寬調(diào)制技術(shù)。脈寬調(diào)制信號的產(chǎn)生涉及電力電子裝置控制系統(tǒng)[2-3],所以超高次諧波源的時(shí)域模型搭建需要關(guān)注其內(nèi)部電力電子裝置的控制系統(tǒng)和脈寬信號生成電路。
實(shí)際電網(wǎng)中,超高次諧波發(fā)生源眾多,每種超高次諧波源都可能有自己獨(dú)特的控制方式,例如電動汽車充電機(jī)等超高次諧波源的控制方式和脈寬調(diào)制信號產(chǎn)生方式都不同[4]。對于同一種典型超高次諧波源,也存在不同的控制方式和脈寬調(diào)制方式,例如一部分光伏逆變器采用電壓外環(huán)、電流內(nèi)環(huán)的雙閉環(huán)控制,一部分光伏逆變器則采用功率外環(huán)、電流內(nèi)環(huán)的控制方式[5]。而對于脈寬調(diào)制信號生成電路,則主要有正弦脈寬調(diào)制(SPWM)和空間矢量脈寬調(diào)制(SVPWM)。
因此,要實(shí)現(xiàn)有源配電網(wǎng)超高次諧波的準(zhǔn)確分析,首先就需要建立能反映實(shí)際工作負(fù)荷超高次諧波特性的各種典型諧波源模型。
1
時(shí)域仿真建模方法
1.1 建立單個(gè)模型
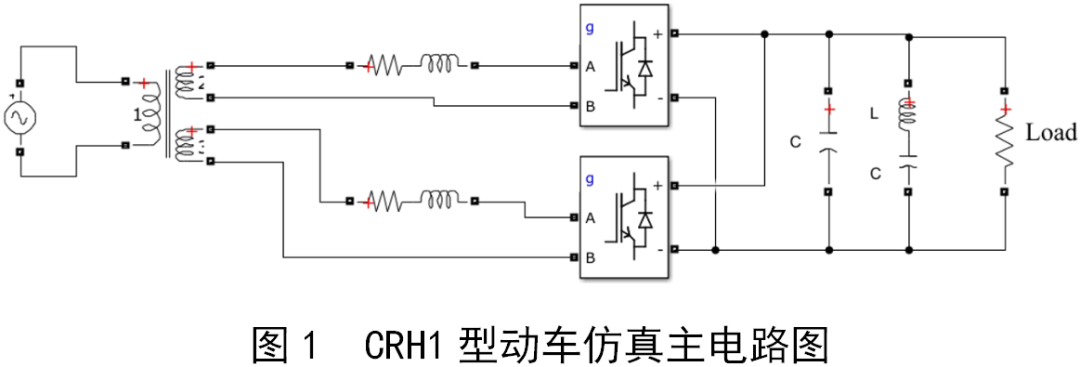
以CRH1型動車為例,確定其超高次諧波源發(fā)生裝置拓?fù)鋱D后,建立仿真電路主電路,如圖1所示。
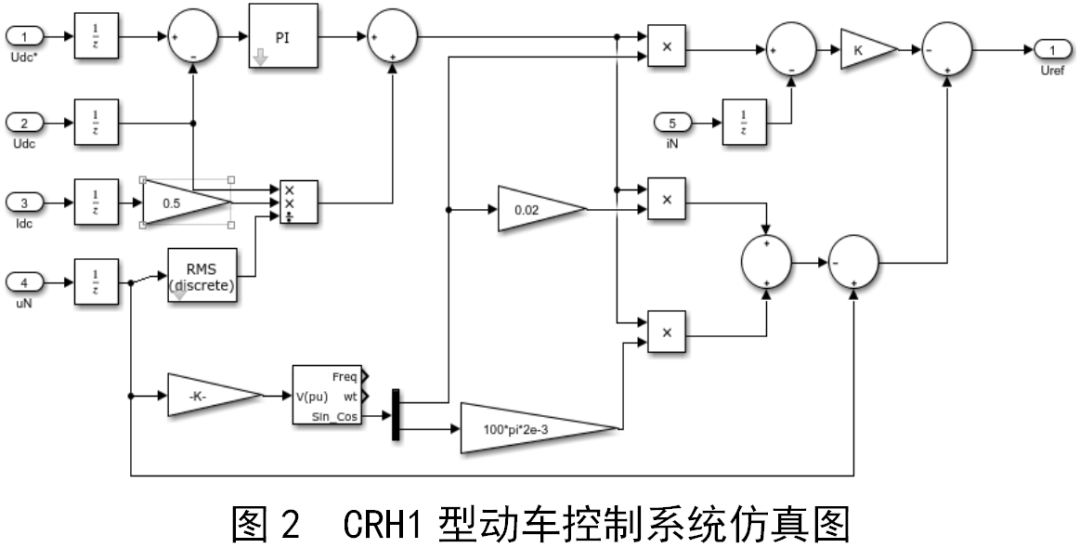
控制系統(tǒng)的建立需要用到多種模塊,其中重要模塊的原理和功能如下:
單相鎖相環(huán):利用信號過零檢測原理,實(shí)時(shí)測量輸入信號的頻率和角度,實(shí)現(xiàn)另一信號頻率和角度的實(shí)時(shí)調(diào)制。一般在電力系統(tǒng)中,鎖相環(huán)輸入為電壓,而另一信號為電流,利用鎖相環(huán),可以動態(tài)調(diào)整電流頻率和相角,實(shí)現(xiàn)電流對電壓的實(shí)時(shí)跟蹤。
延時(shí)模塊:控制系統(tǒng)的輸入來自于對主電路的測量值,實(shí)際系統(tǒng)中信號的測量傳輸再到控制系統(tǒng)的處理是需要一定時(shí)間的,而仿真電路中不存在該問題,所以在控制電路中加入一個(gè)延時(shí)模塊來模擬實(shí)現(xiàn)系統(tǒng)的延時(shí)特性。
建立的控制系統(tǒng)仿真圖如圖2所示。
CRH1型動車都采用正弦脈寬調(diào)制(PWM),單相脈寬調(diào)制電路結(jié)構(gòu)較為簡單,仿真模型如圖3所示。
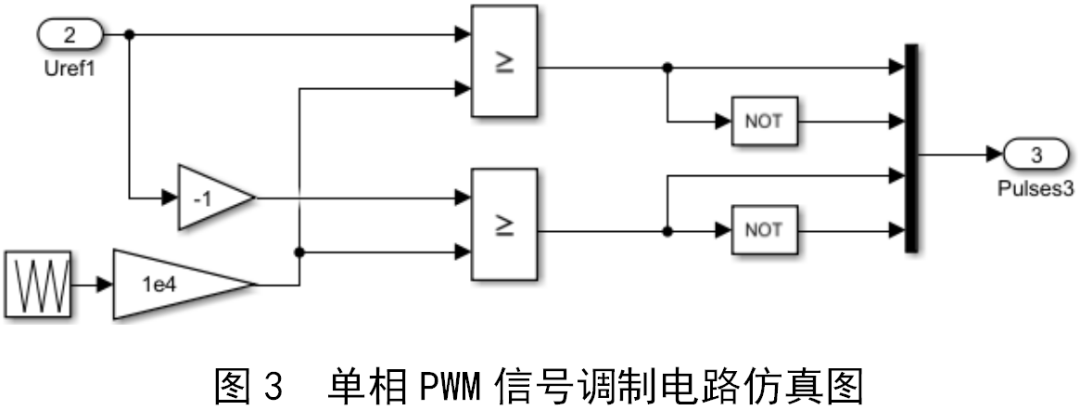
其中Triangle模塊是載波發(fā)生器,可以設(shè)置不同頻率,而載波的頻率則會決定動車變流器產(chǎn)生的超高次諧波頻率。
建立單個(gè)電動汽車充電機(jī)時(shí)域仿真模型的方法與動車模型的建立較為相似,需要依次建立主電路、控制電路、脈寬調(diào)制電路和完整電路分析模型。在模型搭建并完成測試后,將其進(jìn)行封裝,作為模塊備用。
1.2 建立組合模型
對于動車來說,將單個(gè)模型組合起來,需要完成各系統(tǒng)間的銜接,并在仿真系統(tǒng)相應(yīng)節(jié)點(diǎn)增加測量裝置和顯示模塊。
而對于電動汽車,單個(gè)的電動汽車充電機(jī)組不會直接接入電網(wǎng),需要按照常規(guī)電動汽車充電站的充電機(jī)配置臺數(shù)以及連接方式建立電動汽車充電站時(shí)域仿真模型,不同區(qū)域的電動汽車充電站能提供的最大功率不同,站內(nèi)裝置的連接方式也有區(qū)別,但工作原理都較為一致,一般可選用功率適中且實(shí)際較為常用的電動汽車充電站來進(jìn)行建模研究。電動汽車充電站內(nèi)裝置連接示意圖如圖4所示。
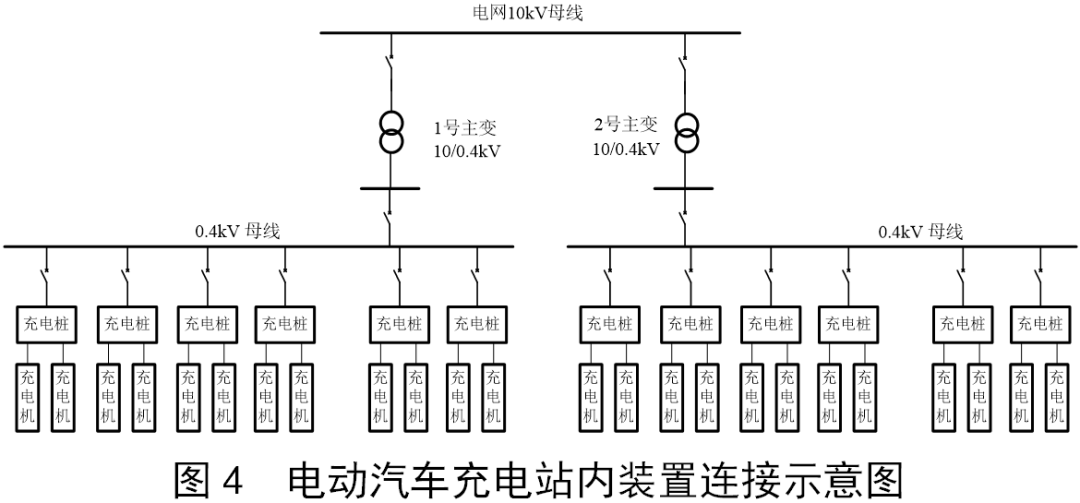
圖4中每個(gè)充電樁包含兩臺充電機(jī),單臺變壓器容量為0.5 MVA。
2
仿真分析方法
2.1 拓?fù)浜喕?/p>
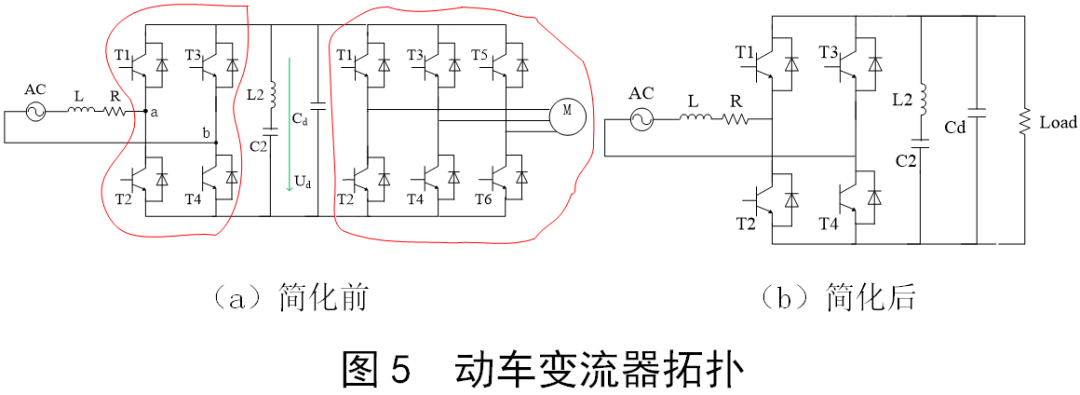
時(shí)域仿真時(shí),隨著網(wǎng)絡(luò)的增大,程序運(yùn)行時(shí)間將大量增加,因此建模時(shí)應(yīng)合理簡化裝置拓?fù)洹3叽沃C波源建模采用簡化分析法,將超高次諧波源裝置內(nèi)與諧波特性無關(guān)的元件作等效處理。例如,CRH1型動車逆變電路與整流電路間有直流穩(wěn)壓電路,所以逆變電路不影響網(wǎng)側(cè)諧波含量,將其等效為一個(gè)電阻性負(fù)載。簡化前后的動車變流器如圖5所示。
2.2 元件等效法
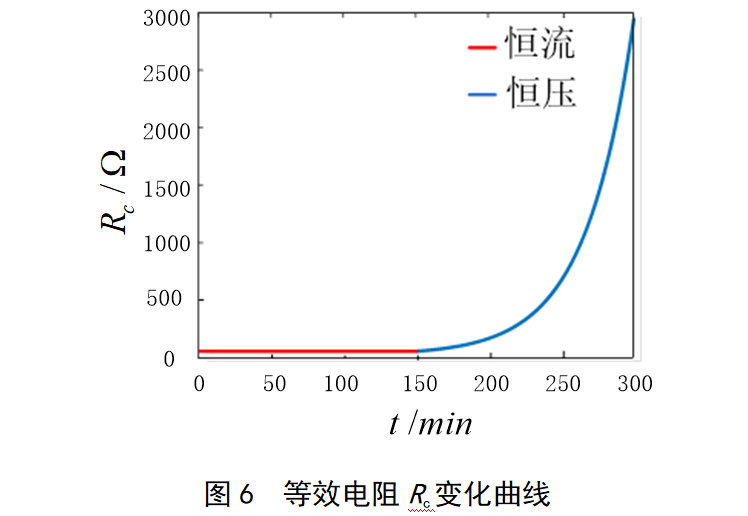
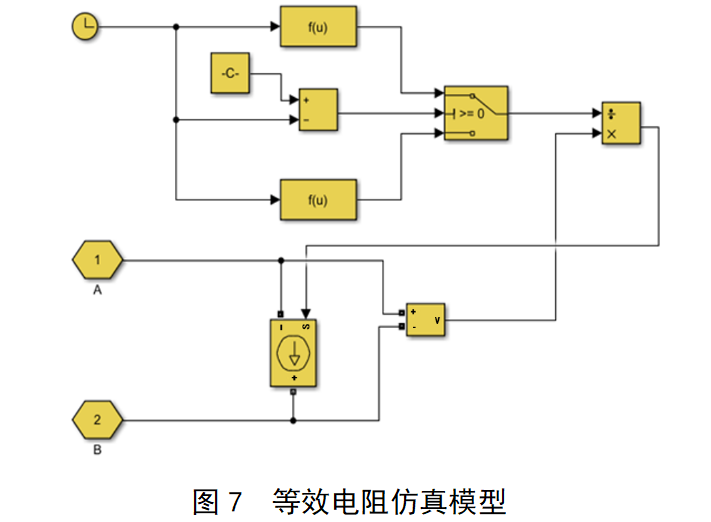
進(jìn)行時(shí)域建模時(shí),仿真軟件可能不存在所需模塊,這時(shí)需要進(jìn)行模型開發(fā)。例如,電動汽車功率變換電路和電動汽車蓄電池用非線性時(shí)變電阻Rc來等效,但仿真軟件無時(shí)變電阻模塊,此時(shí)可根據(jù)實(shí)際電阻曲線(圖6)建立等效時(shí)變電阻模型(圖7)。
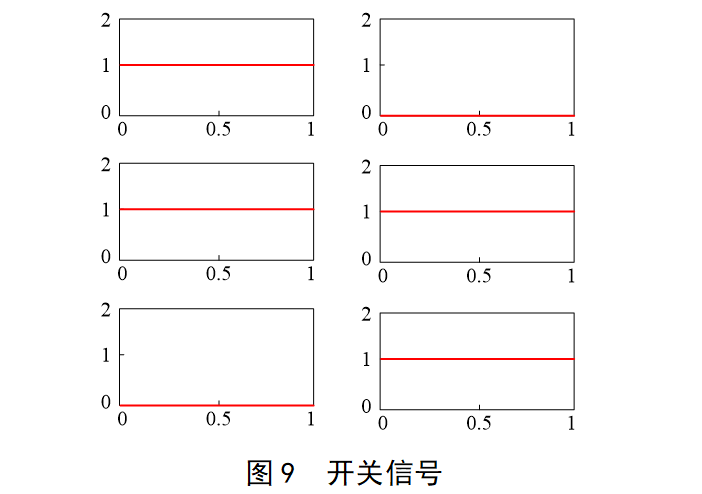
2.3 蒙特卡洛法
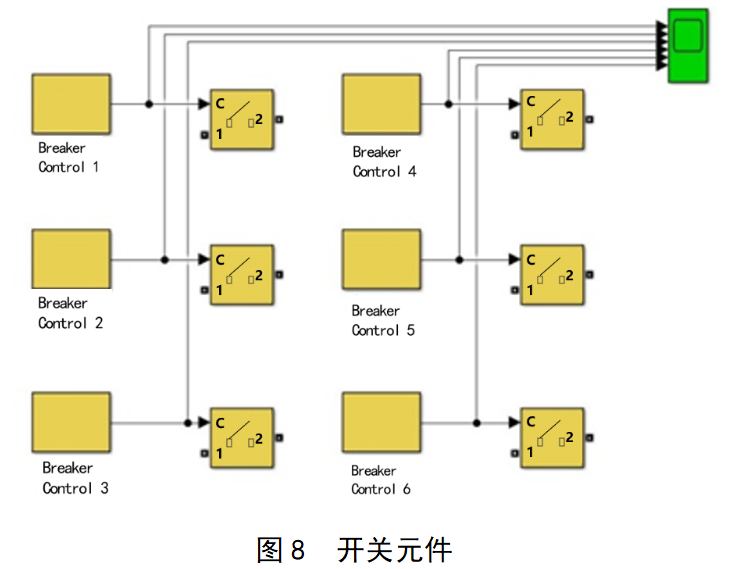
對于電動汽車充電站,其內(nèi)部的電動汽車充電樁工作狀態(tài)不確定,受多種因素影響。為了更準(zhǔn)確地對電動汽車充電站的諧波發(fā)射特性進(jìn)行研究,需模擬站內(nèi)電動汽車充電樁的啟停狀態(tài)。通過對電動汽車充電站各時(shí)段內(nèi)充電樁工作狀態(tài)的統(tǒng)計(jì),可以得到各時(shí)段內(nèi)電動汽車充電樁工作臺數(shù)的概率密度函數(shù),因此可以利用蒙特卡洛法仿真模擬各電動汽車充電樁的開關(guān)狀態(tài)。例如,將Matlab中生成蒙特卡洛信號的m文件作為仿真模型準(zhǔn)備程序,生成的開關(guān)信號將直接作用在開關(guān)控制器上,控制開關(guān)狀態(tài)。圖8是開關(guān)元件,圖9為利用蒙特卡洛法生成的開關(guān)信號。
3
仿真模型搭建
CRH1型動車完整模型搭建如圖10所示。
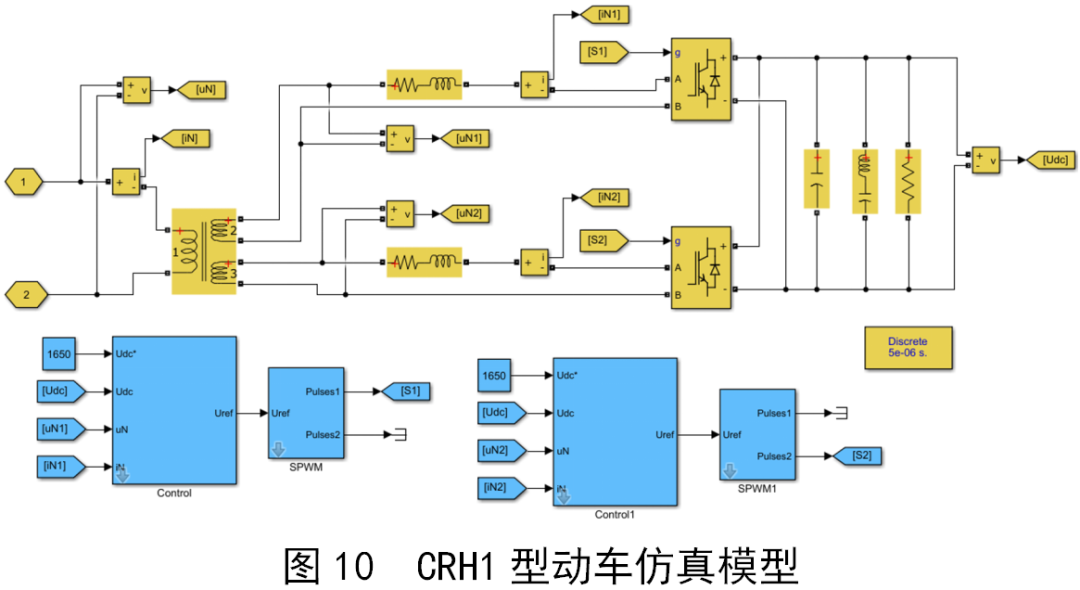
注:整流器開關(guān)頻率f=450Hz,直流電壓Ud=1650V,直流支撐電容Cd=14mF,變壓器一次側(cè)電壓U1N=27.5kV,二次側(cè)電壓U2N=900V,牽引負(fù)荷P=5500kW,濾波電感L2=0.359mH,濾波電容C2=7.06mF,網(wǎng)側(cè)電感L1=2 mH。
電動汽車充電機(jī)完整模型搭建如圖11所示。
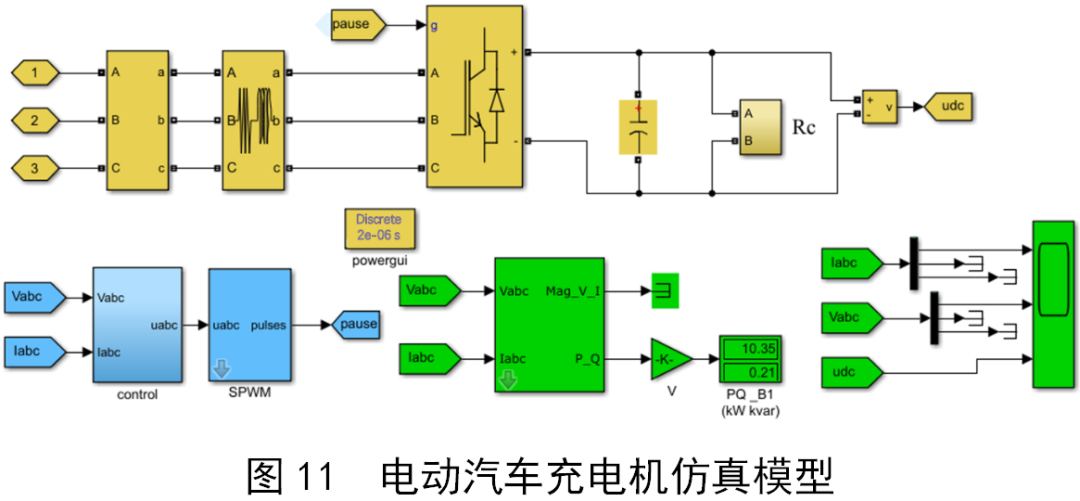
圖中開關(guān)頻率f=5050Hz,網(wǎng)側(cè)電感L=5mH,直流電容C=3mF,額定功率P=10 kW。
按照IEEE拓?fù)鋱D搭建超高次諧波有源配電網(wǎng)仿真模型,結(jié)果如圖12所示。
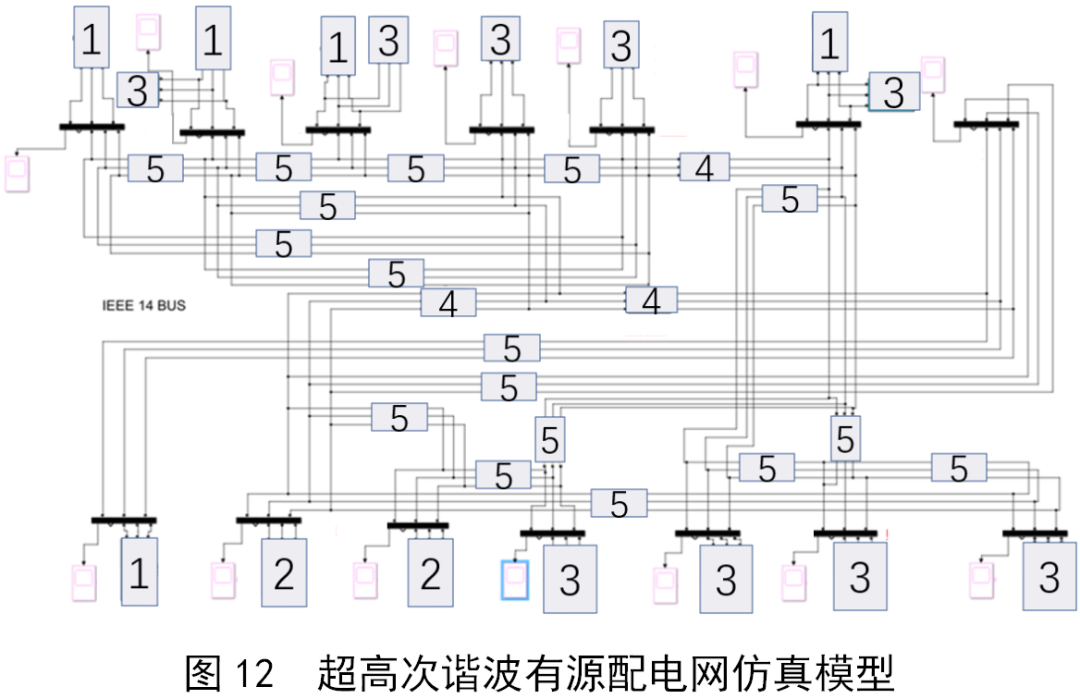
注:1代表小型發(fā)電機(jī),發(fā)電機(jī)所發(fā)功率注入35 kV電網(wǎng);2代表超高次諧波源,其中光伏發(fā)電站與網(wǎng)絡(luò)中的發(fā)電機(jī)共同為配電網(wǎng)供電;3代表配電網(wǎng)中一般性負(fù)荷,按照IEEE 14節(jié)點(diǎn)參數(shù)進(jìn)行各負(fù)荷節(jié)點(diǎn)的功率配置;4為超高次諧波變壓器,整個(gè)配電網(wǎng)線路中共計(jì)有3臺變比為35/10.5 kV的變壓器;5表示該處的線路的分布式參數(shù)模型。
4
結(jié)語
本文提出了一種能夠反映實(shí)際工作負(fù)荷超高次諧波特性的各種典型諧波源的時(shí)域模型建模方法,建立了考慮拓?fù)浣Y(jié)構(gòu)、調(diào)制方式、控制策略的超高次諧波源模型,并利用蒙特卡洛法模擬電力電子化配電網(wǎng)中超高次諧波源的運(yùn)行工況和配電網(wǎng)運(yùn)行方式,建立了超高次諧波有源配電網(wǎng)的仿真模型。
審核編輯 :李倩
-
建模
+關(guān)注
關(guān)注
1文章
309瀏覽量
60790 -
配電網(wǎng)
+關(guān)注
關(guān)注
4文章
546瀏覽量
29791
發(fā)布評論請先 登錄
相關(guān)推薦
諧波檢測與電力系統(tǒng)穩(wěn)定性
基于移動自回歸的時(shí)序擴(kuò)散預(yù)測模型

使用位移基本場方法對空間擴(kuò)展光源進(jìn)行建模
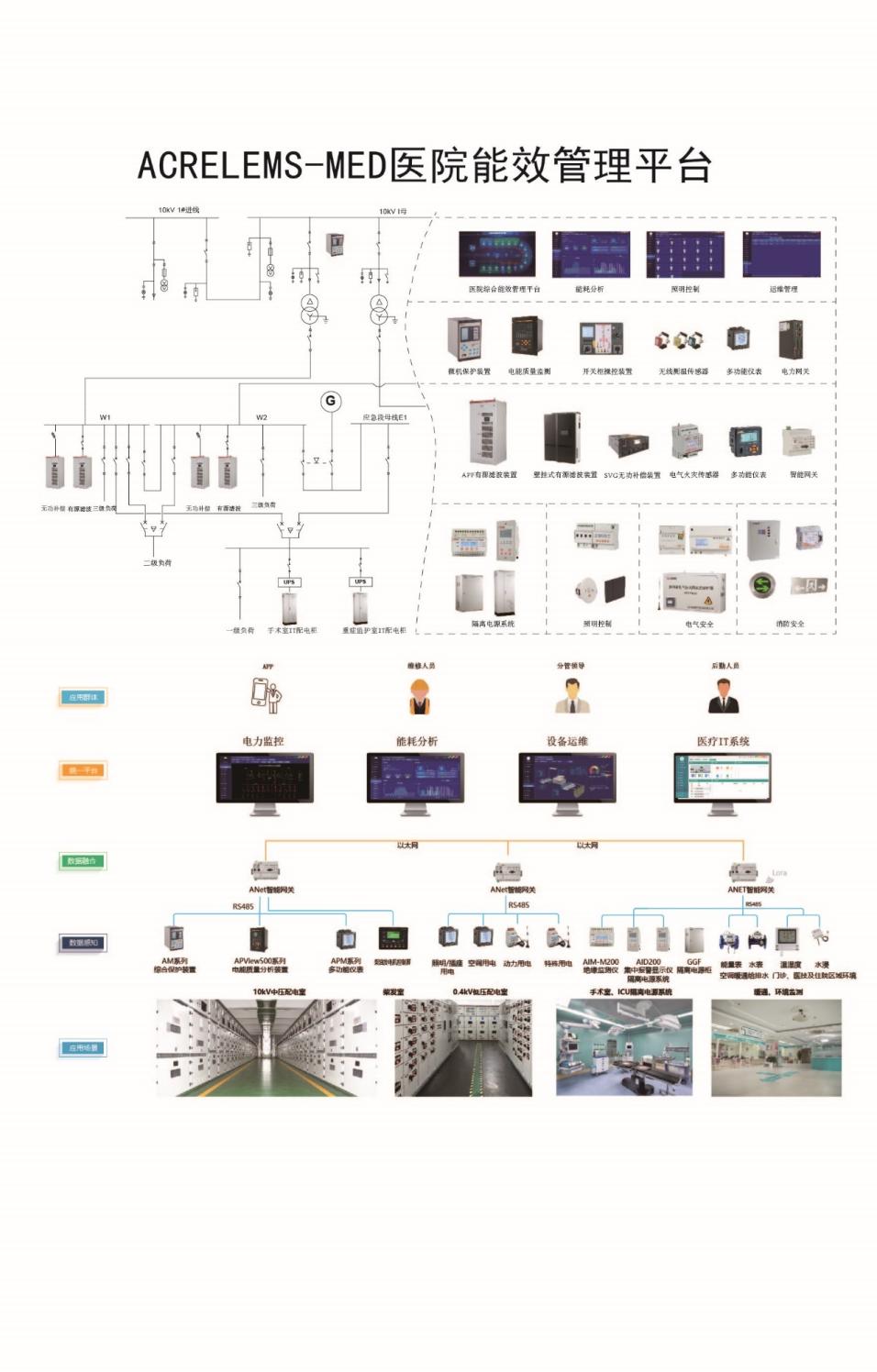
關(guān)于醫(yī)院配電系統(tǒng)諧波分析與治理技術(shù)解決方案
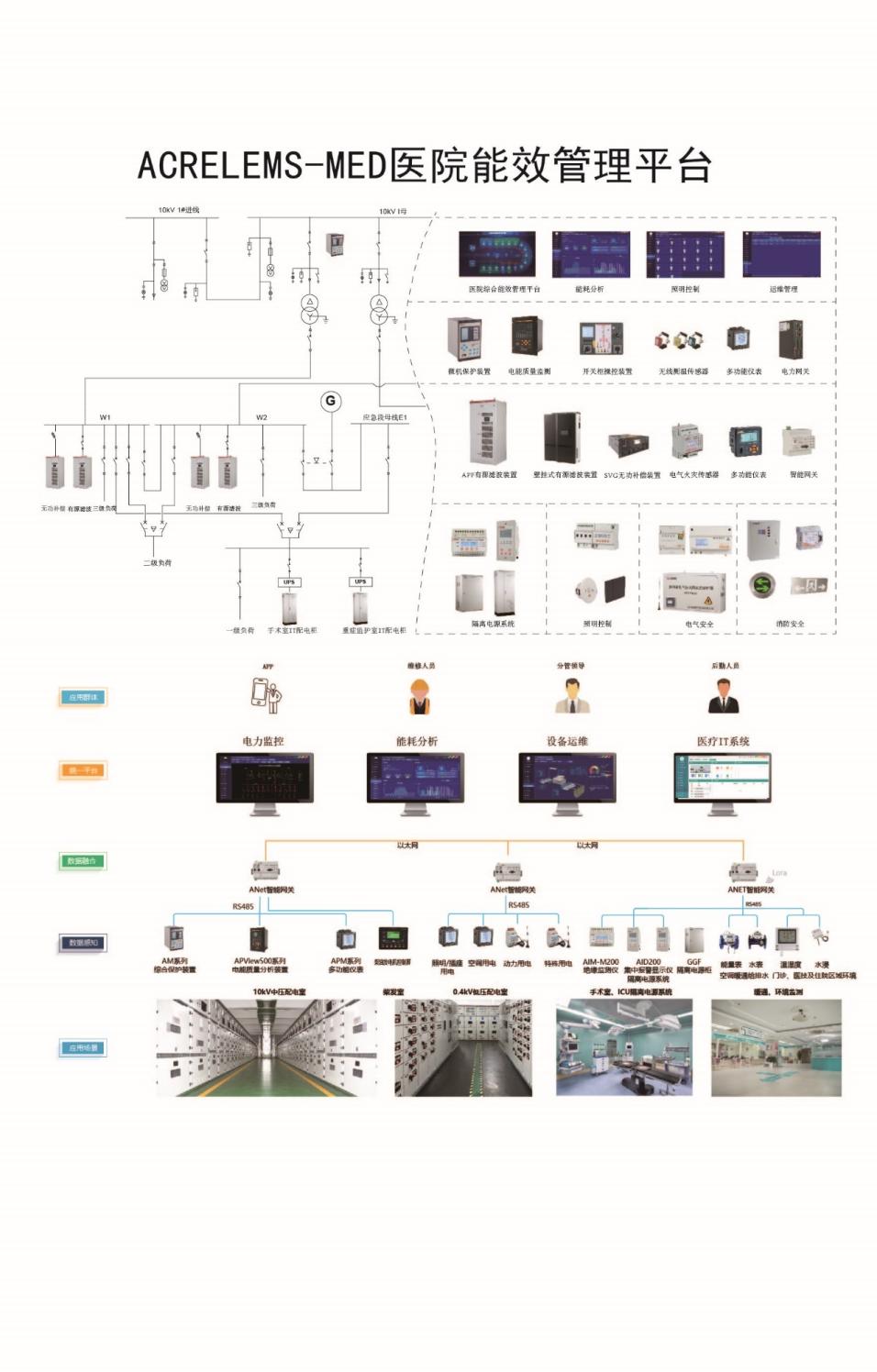
淺談醫(yī)院配電系統(tǒng)諧波分析與治理技術(shù)方案
并聯(lián)電容器諧波瞬時(shí)增大的原因
時(shí)域熱反射測量系統(tǒng)(TDTR)的典型光路介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論