

作者于2022年在北航可靠飛行控制研究組完成本科畢業(yè)設(shè)計。本文節(jié)選自“樂祥立. 基于多旋翼飛行器機(jī)理模型的故障診斷及應(yīng)用[D]. 北京航空航天大學(xué), 2022”。
01、背景介紹
近年來,隨著通信和集成技術(shù)等領(lǐng)域的不斷發(fā)展,多旋翼飛行器已經(jīng)逐步運(yùn)用到軍事、民生和工業(yè)等多個領(lǐng)域,極大地改變了人們的生活。然而,常見的商用和民用多旋翼飛行器具有結(jié)構(gòu)較為簡單、集成了多種傳感器和組件的特點,較易發(fā)生各種類型的故障。多旋翼一旦發(fā)生故障,則容易出現(xiàn)墜機(jī)等狀況,帶來一定的財產(chǎn)損失并且造成安全隱患。因此,無論是專業(yè)從業(yè)人員還是業(yè)余愛好者,都希望能夠及時了解多旋翼飛行器的狀態(tài)以及是否存在故障。 多旋翼發(fā)生故障后在現(xiàn)場缺乏專業(yè)人士時,往往得不到及時的診斷。如若不能及時排查出故障,有可能延誤正在進(jìn)行的工作。目前互聯(lián)網(wǎng)上雖然有諸如Flight Review, FlightPlot等飛行器自駕儀的數(shù)據(jù)分析工具,卻缺少能夠及時反饋故障信息的在線多旋翼飛行器故障診斷平臺,能夠提供的幫助較為有限。
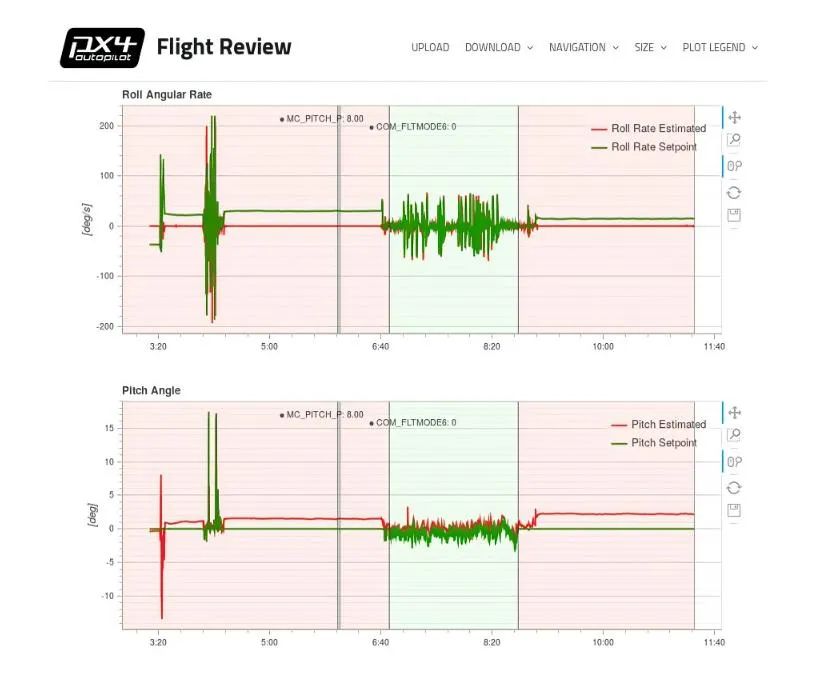
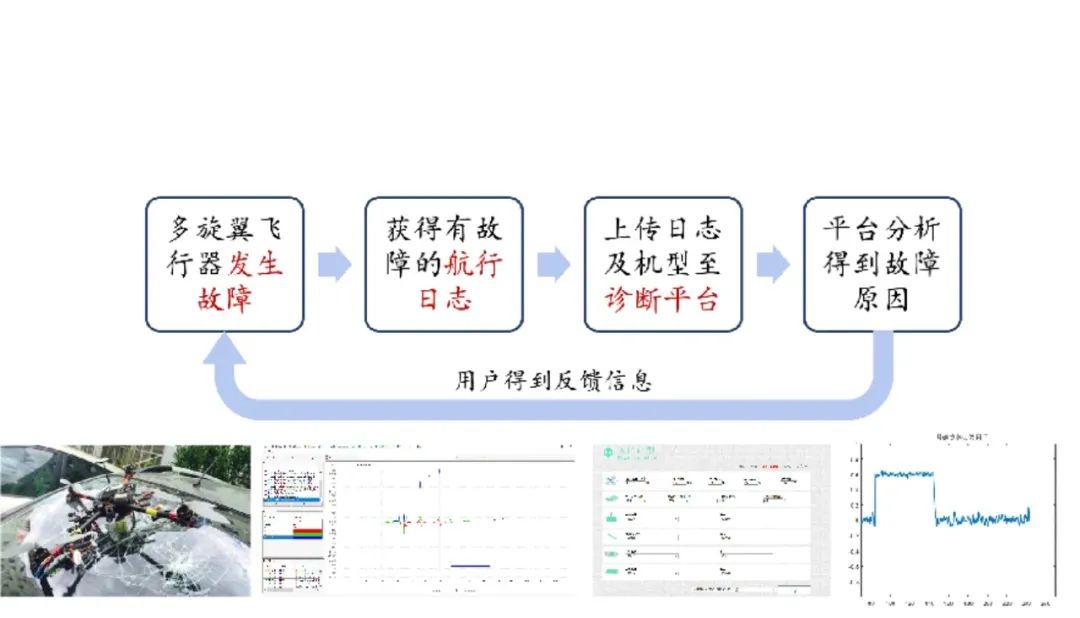
圖為PX4的Flight Review平臺,能夠方便地對多種航行日志數(shù)據(jù)進(jìn)行可視化顯示以及簡單的運(yùn)算,方便進(jìn)行數(shù)據(jù)分析。但是這類平臺均不能夠進(jìn)行故障診斷的工作,還是無法讓用戶快速準(zhǔn)確地知道故障。假若可以利用航行日志的數(shù)據(jù)搭建網(wǎng)頁,用戶通過網(wǎng)頁上傳航行日志數(shù)據(jù)就可以得到相關(guān)的反饋報告,明確是否有故障,故障的類型和故障的程度,就可以實現(xiàn)在現(xiàn)場無專家的情況下幫助各類無人機(jī)用戶實現(xiàn)快速故障診斷的目的。
02、診斷算法介紹
2.1總體介紹
在僅擁有航行日志的情況下,對多旋翼飛行器進(jìn)行故障診斷是較為困難的。首先需要分析多旋翼飛行器的運(yùn)動機(jī)理和航行日志數(shù)據(jù)結(jié)構(gòu),確定基本的診斷方法和需要的數(shù)據(jù)。其次,考慮到帶有故障的航行日志數(shù)據(jù)的缺乏,很難應(yīng)用基于數(shù)據(jù)驅(qū)動的診斷方法,諸如SVM和深度學(xué)習(xí)等,因此采用分析機(jī)理模型的方式建立診斷算法。最后,需要綜合檢驗診斷算法的檢測效果。本文設(shè)計的故障診斷總體方案如下:
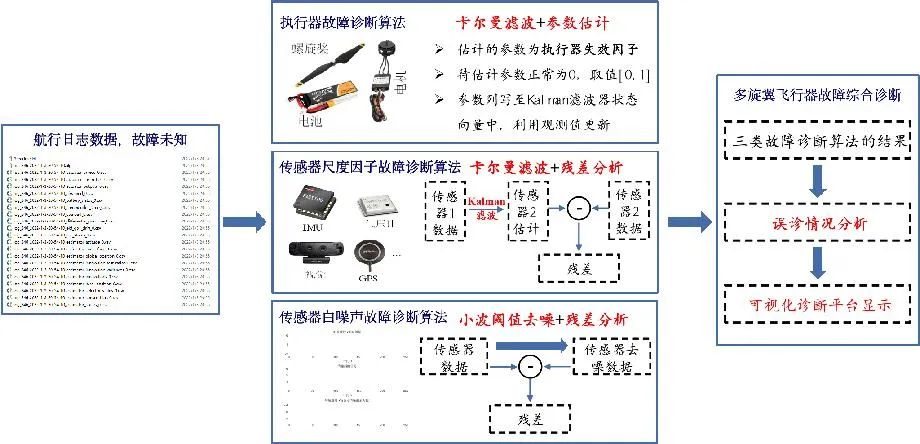
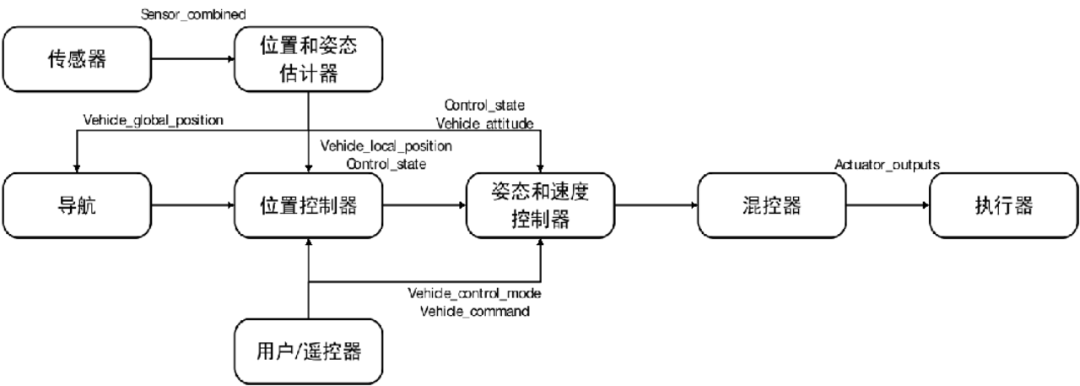
總體流程:首先對收集的航行日志數(shù)據(jù)進(jìn)行預(yù)處理;之后運(yùn)用三類故障診斷方法分別診斷,得到結(jié)果;最后對這三類結(jié)果進(jìn)行綜合評估,分析出真正的故障,排除誤診情況并在可視化平臺上顯示。 需要強(qiáng)調(diào)的是三類故障診斷方法指的是:多旋翼多個執(zhí)行器失效的診斷,傳感器尺度因子故障診斷和傳感器白噪聲變化故障診斷。這里考慮的傳感器只包含陀螺儀,加速度計,磁力計和氣壓計這四種類型。 研究的重難點在于:選取哪些航行日志數(shù)據(jù)作為診斷用的數(shù)據(jù),以及在選擇好的數(shù)據(jù)上怎樣進(jìn)行執(zhí)行器和傳感器的各類故障診斷算法的設(shè)計。 本文通過對航行日志的結(jié)構(gòu)以及飛行控制棧分析最終選定了如下的數(shù)據(jù)作為診斷所需。
2.2 執(zhí)行器故障診斷方法
具體而言,執(zhí)行器失效的故障診斷算法采用卡爾曼濾波和參數(shù)估計的方法進(jìn)行,利用航行日志中的電機(jī)控制輸出指令、位置和姿態(tài)信息以及額外獲得的多旋翼質(zhì)量、轉(zhuǎn)動慣量等機(jī)體數(shù)據(jù)直接運(yùn)用卡爾曼濾波的方式對執(zhí)行器失效的程度進(jìn)行估計。結(jié)果如下:
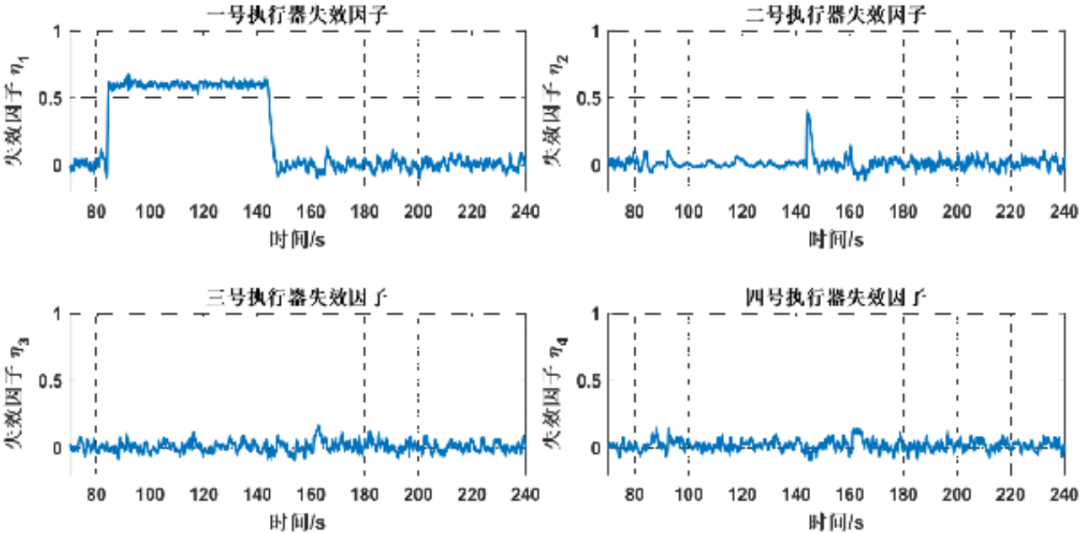
實驗中,加入一次作用于第一個執(zhí)行器上的故障,持續(xù)時間為60秒,故障作用期間螺旋槳的拉力減少的部分占全部拉力的60%。可以看到,估計的結(jié)果基本符合預(yù)期。 2.3 傳感器尺度因子故障診斷方法
傳感器尺度因子的故障診斷方案采用卡爾曼濾波和殘差分析的方式進(jìn)行。首先有基本假設(shè):在航行日志中的同一時刻只有一種類型的故障發(fā)生。 在假設(shè)下的主要思路是傳感器的“互診”,即使用待測傳感器A的數(shù)據(jù)運(yùn)用Kalman濾波的方式去估計另一傳感器B的數(shù)據(jù),而傳感器B的數(shù)據(jù)根據(jù)假設(shè)是假定為一定正確的觀測數(shù)據(jù),由此可以得到殘差。 通過閾值診斷的方法對殘差進(jìn)行檢測,即可實現(xiàn)故障診斷。以加速度計為例的診斷效果如下:
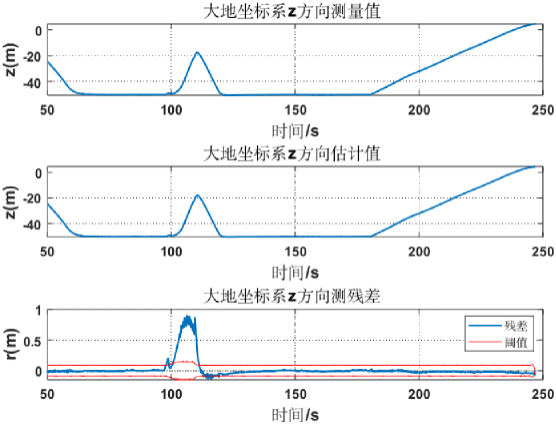
實驗中,加入一次持續(xù)時間為10秒的加速度計尺度因子故障,故障作用期間所有加速度測得信息變?yōu)樵瓉淼?.2倍。可以看到,z方向的殘差出現(xiàn)了明顯超出閾值的部分。 2.4 傳感器白噪聲變化故障診斷方法 傳感器白噪聲故障變化的故障診斷方法采用小波閾值去噪和殘差分析的方式進(jìn)行。具體的做法是利用傳感器的數(shù)據(jù)首先進(jìn)行小波閾值去噪,得到消噪的數(shù)據(jù)。 由于在出現(xiàn)噪聲異常時間段和正常的時間段消噪后的結(jié)果有明顯差異。因此可以通過原始數(shù)據(jù)和消噪數(shù)據(jù)作差的方式得到殘差,并利用這一明顯的差異對故障進(jìn)行診斷。以加速度計為例的診斷效果如下:
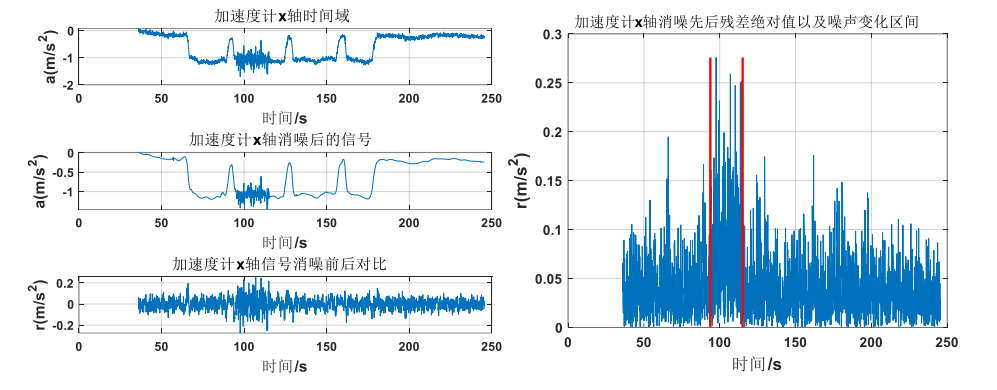
實驗中,加入持續(xù)時間為 20 秒的加速度計白噪聲故障,故障作用期間,加速度計三個軸向上注入的白噪聲幅值均增大至正常狀態(tài)下的 5 倍。可以看到,診斷的結(jié)果是正確的。 2.5 綜合診斷情況分析
最后,還需要對診斷算法進(jìn)行準(zhǔn)確性測試以及誤診情況的分析,具體為:
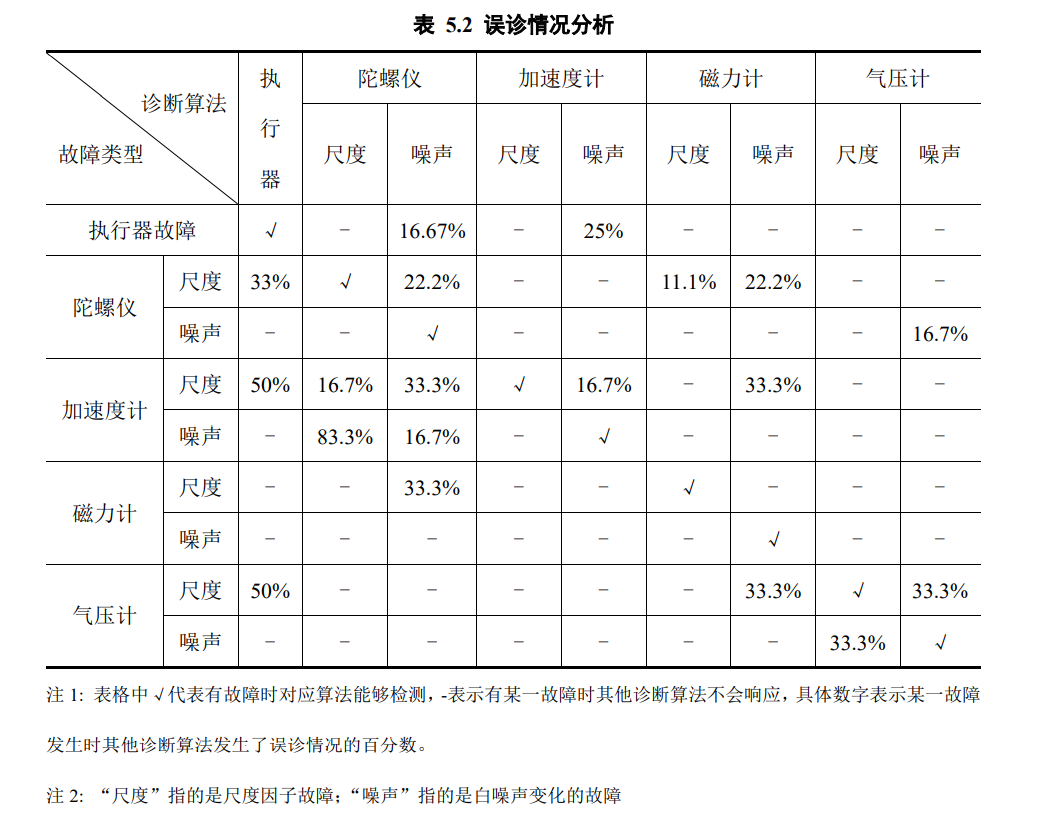
通過對誤診情況進(jìn)行分析,并設(shè)計相應(yīng)的邏輯判斷規(guī)則,就可以實現(xiàn)在發(fā)生誤診情況下的診斷,進(jìn)一步提高診斷的準(zhǔn)確率。
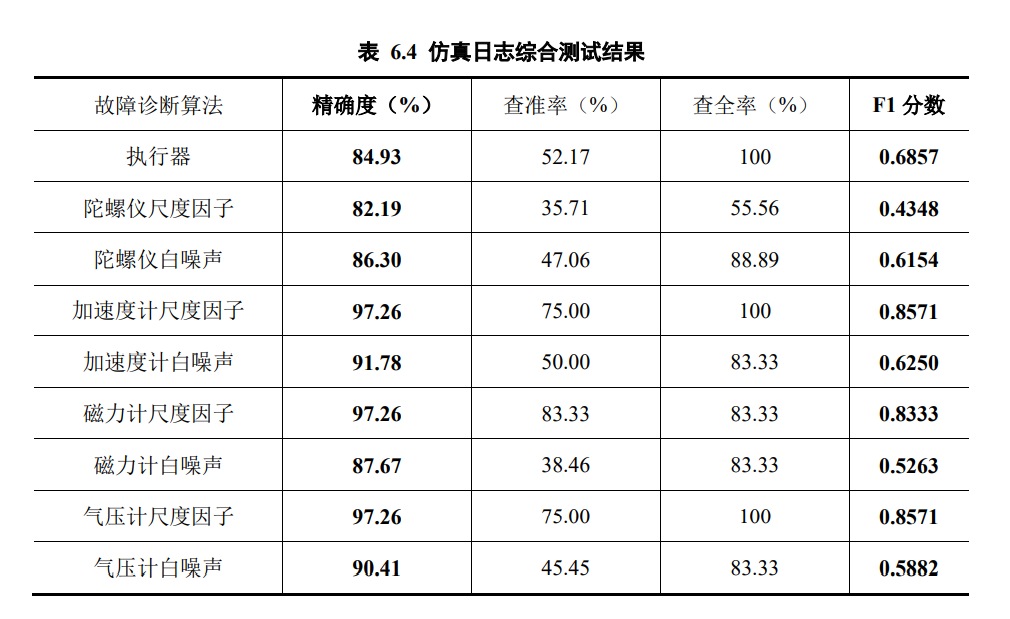
在準(zhǔn)確性測試中,采用多種指標(biāo)進(jìn)行測試的原因在于,精確度的數(shù)據(jù)會受到較多正常數(shù)據(jù)的干擾表現(xiàn)出虛高的現(xiàn)象,F(xiàn)1分?jǐn)?shù)能夠更加可觀的反映診斷效果的好壞。所謂較多正常數(shù)據(jù)指的是,無人機(jī)正常飛行的數(shù)據(jù)和其他部位發(fā)生故障的數(shù)據(jù)相對而言較多,會使得精確度較高。 2.6 多旋翼無人機(jī)故障診斷平臺
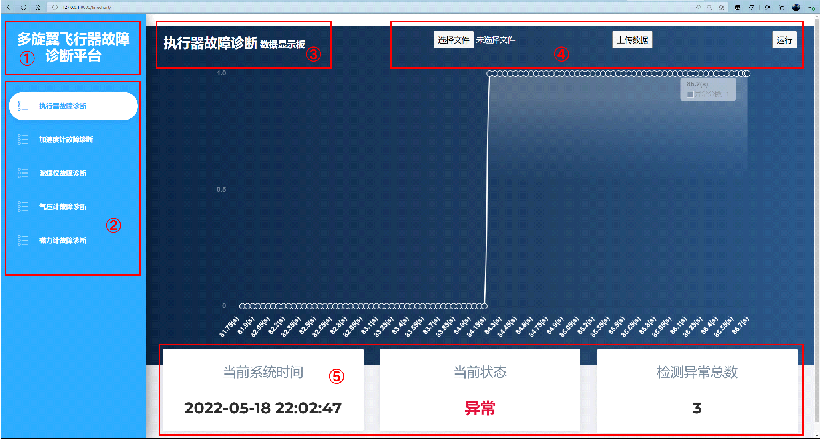
最后,本文也搭建了初步的多旋翼飛行器故障診斷平臺,能夠?qū)崿F(xiàn)航行日志上傳,診斷結(jié)果顯示,數(shù)據(jù)分析和圖表列舉等功能。該平臺以基于Python的Django框架為核心,聯(lián)合MATLAB/Simulink實現(xiàn)航行日志的預(yù)處理和診斷,并實現(xiàn)網(wǎng)頁的交互功能。

文中搭建的故障診斷平臺的初步功能介紹如下:
①平臺名稱:“多旋翼飛行器故障診斷平臺”
②頁面選擇框:點擊不同的診斷算法頁面則會展示不同診斷算法的結(jié)果。
③數(shù)據(jù)顯示板:主要顯示的是在航行日志對應(yīng)時間戳下是否存在故障。存在故障,則會顯示“1”;不存在執(zhí)行器故障,則會顯示“0”。
④日志上傳和運(yùn)行模塊:點擊“選擇文件”后可以從系統(tǒng)中任意位置選擇需要上傳的PX4航行日志數(shù)據(jù),格式為ULG。
⑤時間和故障總狀態(tài)顯示:“當(dāng)前系統(tǒng)時間”展示的是當(dāng)前的真實時間;“當(dāng)前狀態(tài)”展示的是當(dāng)前上傳的航行日志是否存在故障。
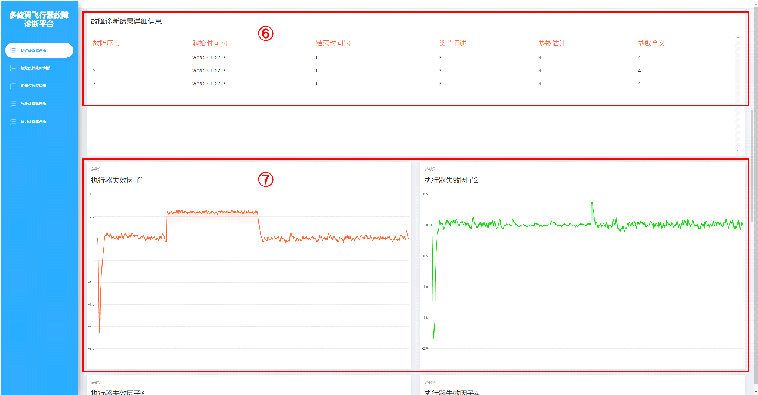
⑥故障診斷結(jié)果詳細(xì)信息:會詳細(xì)列出故障的序號、故障起始和結(jié)束的時間、故障類型說明、對應(yīng)的故障參數(shù)估計結(jié)果以及故障參數(shù)的含義。
⑦參數(shù)曲線展示:該部分展示針對每種故障類型進(jìn)行診斷的特征參數(shù)。
03、總結(jié)與展望
本文通過對多旋翼飛行器進(jìn)行建模以及對故障診斷方法進(jìn)行分析,確立了基于機(jī)理模型的故障診斷方法。其次研究了Pixhawk航行日志的構(gòu)成和格式,確定了故障診斷的數(shù)據(jù)來源和針對數(shù)據(jù)需要預(yù)處理的問題。隨后針對在對多旋翼建模過程中設(shè)計的幾類故障各自設(shè)計了單獨(dú)的故障診斷方案,針對執(zhí)行器故障的參數(shù)估計方法,針對傳感器尺度因子故障的殘差檢測方案以及針對傳感器白噪聲變化故障的小波變換方案。更進(jìn)一步的分析了執(zhí)行器故障診斷方案建立的流程、假設(shè)和可觀測性分析以及殘差檢測方案中的閾值確定方法和故障區(qū)間判斷的問題。接著對設(shè)計的故障診斷方案進(jìn)行了初步的仿真驗證和綜合測試。初步仿真驗證主要檢驗診斷方案的可行性,綜合測試則驗證了診斷算法之間的誤診情況并給出了解決方案,進(jìn)一步測試了單一算法的準(zhǔn)確率,查全率,查準(zhǔn)率和F1分?jǐn)?shù)的情況,分析原因并在真實航行日志上進(jìn)行了驗證,發(fā)現(xiàn)了諸多可以改進(jìn)的部分。最后,使用以Python為核心的Django框架,聯(lián)合MATLAB/Simulink初步搭建了多旋翼飛行器故障診斷可視化平臺,方便進(jìn)行快速地故障診斷工作。 本文只是一個初步的方案,還存在著諸多不足之處。比如白噪聲故障診方案的F1分?jǐn)?shù)較低,還可以進(jìn)一步提升性能;陀螺儀尺度因子故障診斷方案較容易出現(xiàn)誤診的情況,可以改進(jìn)方法。此外,執(zhí)行器故障診斷方案現(xiàn)在存在著諸多的假設(shè),可以進(jìn)一步增加模型的復(fù)雜性,提升其對更多情況下的適應(yīng)能力。另外,現(xiàn)有的診斷算法在真實航行日志下并不盡如人意,后期工作中還需要進(jìn)一步加強(qiáng)診斷算法的魯棒性,減少誤診情況,完善真實航行日志的驗證工作,提高其實用性。最后,故障診斷平臺現(xiàn)還只能單機(jī)運(yùn)行,并不能實現(xiàn)線上的操作,也還沒有對不同類型的航行日志數(shù)據(jù)實現(xiàn)分類處理的功能。
審核編輯 :李倩
-
傳感器
+關(guān)注
關(guān)注
2557文章
51946瀏覽量
760241 -
飛行器
+關(guān)注
關(guān)注
13文章
731瀏覽量
45949 -
多旋翼
+關(guān)注
關(guān)注
0文章
5瀏覽量
2527
原文標(biāo)題:利用飛行日志對多旋翼進(jìn)行全自動故障診斷
文章出處:【微信號:雨飛工作室,微信公眾號:雨飛工作室】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
電機(jī)故障診斷常見誤區(qū)的剖析
二極管的故障診斷方法
電力系統(tǒng)故障診斷方法 電力系統(tǒng)新能源如何接入
可控硅的故障診斷方法 可控硅模塊的選型指南
干式電抗器的故障診斷和排除方法是什么?
ECU故障診斷工具 如何選擇合適的ECU

晶閘管故障診斷方法
分布式故障診斷裝置

旋轉(zhuǎn)變壓器的故障診斷方法
基于增強(qiáng)遷移卷積神經(jīng)網(wǎng)絡(luò)的機(jī)械智能故障診斷
繼電器故障診斷與智能維護(hù)技術(shù)
電氣設(shè)備狀態(tài)監(jiān)測與故障診斷
AC/DC電源模塊的故障診斷與維修技巧






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論