

輸入輸出接口 Input: (1)4個(gè)攝像頭采集的圖像視頻分辨率 (整型int) (2)4個(gè)攝像頭采集的圖像視頻格式 (RGB,YUV,MP4等) (3)攝像頭標(biāo)定參數(shù)(中心位置(x,y)和5個(gè)畸變 系數(shù)(2徑向,2切向,1棱向),浮點(diǎn)型float) (4)攝像頭初始化參數(shù)(攝像頭初始位置和三個(gè)坐標(biāo)方向 的旋轉(zhuǎn)角度,車輛寬度高度車速等等,浮點(diǎn)型float) Output: (1)圖像融合和拼接的image/video的坐標(biāo)位置(浮點(diǎn)型float) (2)圖像融合和拼接的圖像視頻分辨率(整型int) (3)圖像融合和拼接的圖像視頻格式 (RGB,YUV,MP4等) (4)車輛周圍障礙物報(bào)警 (字符型char)22.1功能定義 1)計(jì)算圖像融合和拼接的image/video的坐標(biāo)位置。 2)算出圖像融合和拼接的圖像視頻分辨率。 3)確定圖像融合和拼接的圖像視頻格式。 4)檢測(cè)車輛周圍障礙物并報(bào)警。22.2技術(shù)路線方案 在360°全景視圖泊車輔助系統(tǒng)中,通過安裝在車輛前、后、左、右 4 個(gè)方位的廣角攝像頭采集車輛四周的視頻影像,利用圖像融合和拼接技術(shù)合成一幅車身周圍的全景視圖,最后在中控臺(tái)的屏幕上顯示,以擴(kuò)大駕駛員視野。借助360°全景視圖泊車輔助系統(tǒng),駕駛員坐在車中即可直觀地看到車輛周圍是否存在障礙物以及障礙物的相對(duì)方位與距離,以便在狹窄擁堵的停車場(chǎng)從容操控車輛泊車入位或通過復(fù)雜的路面,可有效防止刮蹭、碰撞、陷落等事故的發(fā)生。同時(shí),全景視圖也可以為自動(dòng)駕駛系統(tǒng)中識(shí)別、檢測(cè)、跟蹤等算法提供支持。 富士通(Fujitsu)開發(fā)的視頻成像技術(shù), 可實(shí)時(shí)實(shí)現(xiàn)車輛的完整360°環(huán)繞視圖。四個(gè)相機(jī)安裝在車輛前后左右周邊,車輛周圍環(huán)境的視頻圖像通過富士通的3D虛擬投影/視點(diǎn)轉(zhuǎn)換技術(shù)進(jìn)行合成。先進(jìn)的三維算法可以比較流暢地結(jié)合四個(gè)獨(dú)立相機(jī)的圖像,提供一個(gè)無縫和清晰的360°視圖。具體來說,四個(gè)攝像頭的圖像被發(fā)送到視頻處理LSI,包括視頻捕捉和3D功能,然后相機(jī)圖像合成為單個(gè)實(shí)時(shí)3D圖像并投影到三維碗形網(wǎng)格,生成虛擬3D環(huán)繞視頻,可以任意轉(zhuǎn)換車輛周圍環(huán)境視圖視角。
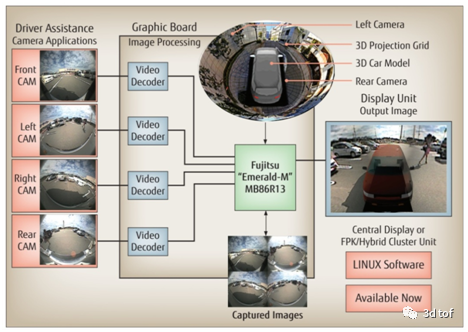 圖1. 富士通環(huán)視方案流程圖
為了滿足視頻拼接的實(shí)時(shí)性要求,同時(shí)考慮到攝像頭安裝的位置、角度以及不同攝像頭之間相互位置相對(duì)固定,在本項(xiàng)目中可以使用基于特定圖像拼接與查表法相結(jié)合的多視點(diǎn)視頻拼接方法。在初始化階段,首先采集預(yù)先放置于車輛前、后、左、右 4個(gè)方位的帶有棋盤格的標(biāo)定圖像,利用標(biāo)定圖像分別對(duì)4個(gè)攝像頭進(jìn)行參數(shù)標(biāo)定,求出并保存每個(gè)攝像頭圖像畸變矯正參數(shù),對(duì)標(biāo)定圖像進(jìn)行畸變矯正,消除攝像頭成像失真;然后對(duì)畸變矯正后的標(biāo)定圖像進(jìn)行射影變換,求出并保存射影變換參數(shù);接著采集預(yù)先放置于車輛前、后、左、右4個(gè)方位的帶有豐富特征點(diǎn)的特定圖像,并通過查找攝像頭圖像畸變矯正參數(shù)進(jìn)行畸變矯正,通過查找射影變換參數(shù)將矯正后的特定圖像變換成俯瞰圖;最后對(duì)4個(gè)俯瞰圖提取 ORB( Oriented FAST and Rotated BRIEF) 特征并進(jìn)行粗匹配,利用 RANSAC( Random Sample Consensus,隨機(jī)抽樣一致) 算法剔除誤匹配點(diǎn),并擬合出單應(yīng)性矩陣的初始值,再使用 Levenberg-Marquardt 非線性迭代最小逼近法進(jìn)行求精,經(jīng)圖像配準(zhǔn)、融合和拼接后,生成360°俯瞰全景視圖。在泊車輔助系統(tǒng)啟用期間,通過查找已保存的攝像頭圖像畸變矯正參數(shù)、射影變換參數(shù)以及單應(yīng)性矩陣參數(shù),將4個(gè)攝像頭的視頻圖像進(jìn)行拼接,生成虛擬的俯瞰全景視圖。
由于攝像頭內(nèi)外參數(shù)校正準(zhǔn)確性對(duì)圖像投影效果影響大;需要結(jié)合攝像頭安裝具體情況進(jìn)行算法的調(diào)整;為滿足嵌入式系統(tǒng)實(shí)時(shí)性需求,需要不斷優(yōu)化算法;盡量進(jìn)行流程簡(jiǎn)化或者流程自動(dòng)化。
圖1. 富士通環(huán)視方案流程圖
為了滿足視頻拼接的實(shí)時(shí)性要求,同時(shí)考慮到攝像頭安裝的位置、角度以及不同攝像頭之間相互位置相對(duì)固定,在本項(xiàng)目中可以使用基于特定圖像拼接與查表法相結(jié)合的多視點(diǎn)視頻拼接方法。在初始化階段,首先采集預(yù)先放置于車輛前、后、左、右 4個(gè)方位的帶有棋盤格的標(biāo)定圖像,利用標(biāo)定圖像分別對(duì)4個(gè)攝像頭進(jìn)行參數(shù)標(biāo)定,求出并保存每個(gè)攝像頭圖像畸變矯正參數(shù),對(duì)標(biāo)定圖像進(jìn)行畸變矯正,消除攝像頭成像失真;然后對(duì)畸變矯正后的標(biāo)定圖像進(jìn)行射影變換,求出并保存射影變換參數(shù);接著采集預(yù)先放置于車輛前、后、左、右4個(gè)方位的帶有豐富特征點(diǎn)的特定圖像,并通過查找攝像頭圖像畸變矯正參數(shù)進(jìn)行畸變矯正,通過查找射影變換參數(shù)將矯正后的特定圖像變換成俯瞰圖;最后對(duì)4個(gè)俯瞰圖提取 ORB( Oriented FAST and Rotated BRIEF) 特征并進(jìn)行粗匹配,利用 RANSAC( Random Sample Consensus,隨機(jī)抽樣一致) 算法剔除誤匹配點(diǎn),并擬合出單應(yīng)性矩陣的初始值,再使用 Levenberg-Marquardt 非線性迭代最小逼近法進(jìn)行求精,經(jīng)圖像配準(zhǔn)、融合和拼接后,生成360°俯瞰全景視圖。在泊車輔助系統(tǒng)啟用期間,通過查找已保存的攝像頭圖像畸變矯正參數(shù)、射影變換參數(shù)以及單應(yīng)性矩陣參數(shù),將4個(gè)攝像頭的視頻圖像進(jìn)行拼接,生成虛擬的俯瞰全景視圖。
由于攝像頭內(nèi)外參數(shù)校正準(zhǔn)確性對(duì)圖像投影效果影響大;需要結(jié)合攝像頭安裝具體情況進(jìn)行算法的調(diào)整;為滿足嵌入式系統(tǒng)實(shí)時(shí)性需求,需要不斷優(yōu)化算法;盡量進(jìn)行流程簡(jiǎn)化或者流程自動(dòng)化。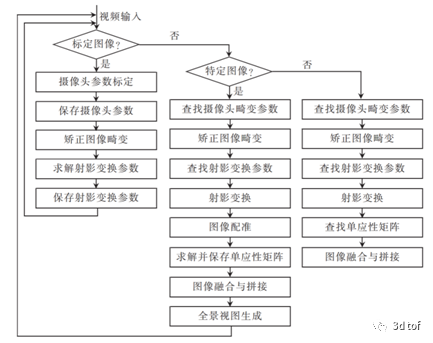 圖2. 算法流程
圖2. 算法流程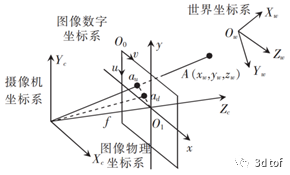 圖3. 攝像頭成像及其坐標(biāo)系
主要數(shù)學(xué)原理,世界坐標(biāo)系中某點(diǎn)
圖3. 攝像頭成像及其坐標(biāo)系
主要數(shù)學(xué)原理,世界坐標(biāo)系中某點(diǎn) 投影到圖像平面上的像素點(diǎn)( u,v).該過程要經(jīng)過齊次坐標(biāo)轉(zhuǎn)換:
投影到圖像平面上的像素點(diǎn)( u,v).該過程要經(jīng)過齊次坐標(biāo)轉(zhuǎn)換: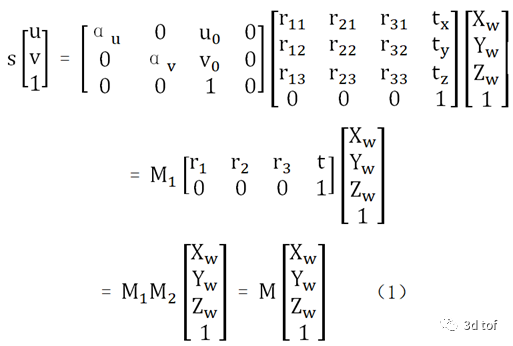 其中,s為任意的非零比例因子;αu=f/dx,f是攝像頭的焦距,dx代表x軸方向一個(gè)像素的寬度
其中,s為任意的非零比例因子;αu=f/dx,f是攝像頭的焦距,dx代表x軸方向一個(gè)像素的寬度 是圖像在 u 軸上的尺度因子,或稱為u軸上的歸一化焦距;
是圖像在 u 軸上的尺度因子,或稱為u軸上的歸一化焦距; ?,其中dy代表y軸方向一個(gè)像素的高度,αv是圖像在v軸上的尺度因子,或稱為v軸上的歸一化焦距;
?,其中dy代表y軸方向一個(gè)像素的高度,αv是圖像在v軸上的尺度因子,或稱為v軸上的歸一化焦距; ,它們是攝像頭坐標(biāo)系相對(duì)于世界坐標(biāo)系的旋轉(zhuǎn)向量;?
,它們是攝像頭坐標(biāo)系相對(duì)于世界坐標(biāo)系的旋轉(zhuǎn)向量;? 是攝像頭坐標(biāo)系相對(duì)于世界坐標(biāo)系的平移向量;M1 由
是攝像頭坐標(biāo)系相對(duì)于世界坐標(biāo)系的平移向量;M1 由 決定,只與攝像頭內(nèi)部參數(shù)有關(guān),稱為攝像頭內(nèi)部參數(shù)矩陣;M2 由攝像頭相對(duì)于世界坐標(biāo)系的方位決定,稱為攝像頭外部參數(shù)矩陣;M 是一個(gè)3×4矩陣,稱作投影矩陣,用于計(jì)算從世界坐標(biāo)系到圖像坐標(biāo)系的轉(zhuǎn)換。可見,若已知攝像頭的內(nèi)、外參數(shù),就能夠知道投影矩陣 M,對(duì)空間內(nèi)任何一點(diǎn),如果已知它的空間坐標(biāo)
決定,只與攝像頭內(nèi)部參數(shù)有關(guān),稱為攝像頭內(nèi)部參數(shù)矩陣;M2 由攝像頭相對(duì)于世界坐標(biāo)系的方位決定,稱為攝像頭外部參數(shù)矩陣;M 是一個(gè)3×4矩陣,稱作投影矩陣,用于計(jì)算從世界坐標(biāo)系到圖像坐標(biāo)系的轉(zhuǎn)換。可見,若已知攝像頭的內(nèi)、外參數(shù),就能夠知道投影矩陣 M,對(duì)空間內(nèi)任何一點(diǎn),如果已知它的空間坐標(biāo) ,就可以求出對(duì)應(yīng)的像素點(diǎn)坐標(biāo)(u,v) 。
?
,就可以求出對(duì)應(yīng)的像素點(diǎn)坐標(biāo)(u,v) 。
? ?
?張正友標(biāo)定法,采用棋盤格平面靶標(biāo)作為標(biāo)定物,可以把世界坐標(biāo)系構(gòu)造在 Zw = 0的平面上。
?
?
?張正友標(biāo)定法,采用棋盤格平面靶標(biāo)作為標(biāo)定物,可以把世界坐標(biāo)系構(gòu)造在 Zw = 0的平面上。
? ?
?其中,
?
?其中, 和
和 是徑向畸變系數(shù)。將式(3)化成矩陣形式為
?
是徑向畸變系數(shù)。將式(3)化成矩陣形式為
? ?
?以上是畸變矯正公式。
?
?以上是畸變矯正公式。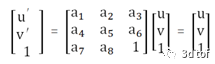 ?
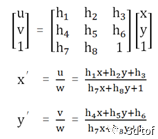
?以上是射影變換。
?
?
?以上是射影變換。
? ?
?以上是畸變矯正及射影變換所對(duì)應(yīng)的坐標(biāo)像素計(jì)算公式。
?
?
?以上是畸變矯正及射影變換所對(duì)應(yīng)的坐標(biāo)像素計(jì)算公式。
? ?
?以上是圖像拼接單應(yīng)性矩陣求解公式。
?
?
?以上是圖像拼接單應(yīng)性矩陣求解公式。
?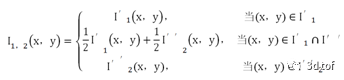 ?
?以上是平均值法對(duì)拼接重疊區(qū)域進(jìn)行融合。
?
?
?以上是平均值法對(duì)拼接重疊區(qū)域進(jìn)行融合。
?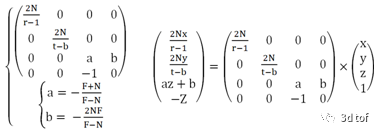 ?
?以上是3-D ship模型視角轉(zhuǎn)換矩陣。
?
?
?以上是3-D ship模型視角轉(zhuǎn)換矩陣。
?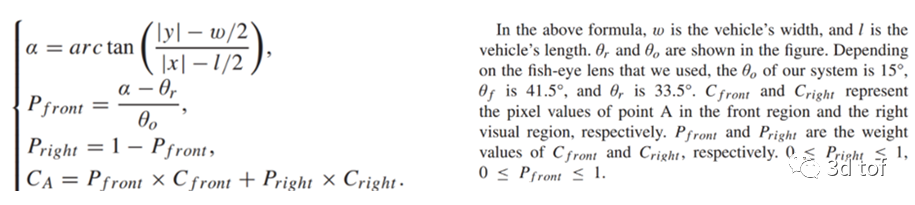
圖4. alpha fusion22.3關(guān)鍵技術(shù)參數(shù)和性能指標(biāo) 一種基于自適應(yīng)特征點(diǎn)配準(zhǔn)的環(huán)視系統(tǒng)拼接效果評(píng)估和自動(dòng)微調(diào)方法,其特征在于:包括以下步驟: 步驟A、獲得拼接前圖像,并截取根據(jù)拼接參數(shù)算出的拍攝的相同位置的圖像; 步驟B、采用自適應(yīng)特征點(diǎn)配準(zhǔn)算法來獲得拼接前相同位置的圖像的旋轉(zhuǎn)平移矩陣; 步驟C、將旋轉(zhuǎn)平移矩陣或者對(duì)其進(jìn)行計(jì)算得到的角度信息和位移信息作為環(huán)視系統(tǒng)拼接效果的評(píng)估指標(biāo),并用此矩陣對(duì)拼接效果進(jìn)行微調(diào)。
審核編輯:彭靜
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
接口
+關(guān)注
關(guān)注
33文章
8845瀏覽量
152798 -
攝像頭
+關(guān)注
關(guān)注
60文章
4904瀏覽量
97242 -
視頻拼接
+關(guān)注
關(guān)注
0文章
7瀏覽量
6266
原文標(biāo)題:ADAS攝像頭圖像環(huán)視拼接算法
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
視頻處理器晶振應(yīng)用方案
技術(shù)干貨丨視頻處理器晶振應(yīng)用方案一、定義與作用視頻拼接控制器也稱視頻處理器,在液晶拼接屏中起了重要的作用,它是大屏
發(fā)表于 02-07 09:32
?0次下載
低空視頻傳輸在望獲實(shí)時(shí)linux系統(tǒng)上的應(yīng)用
望獲實(shí)時(shí)linux系統(tǒng)因其高確定性和低延遲的特性,在低空視頻傳輸中扮演著關(guān)鍵角色。低空經(jīng)濟(jì)涵蓋無人機(jī)物流、農(nóng)業(yè)監(jiān)控、低空交通管理等場(chǎng)景,這些場(chǎng)景對(duì)視頻傳輸?shù)?b class='flag-5'>實(shí)時(shí)性、可靠性和高效性有極高
AMS-MS16K系列:重塑4K視頻拼接處理的新標(biāo)桿
這場(chǎng)視覺盛宴的背后,離不開一款強(qiáng)大而靈活的視頻拼接處理器——AMS-MS16K系列。 AMS-MS16K系列,作為Amoonsky推出的新一代4K輸入多畫面視頻拼接處理器,以其卓越的性

AMS-MC158:重塑LED視頻拼接新境界
在當(dāng)今視覺傳達(dá)占據(jù)主導(dǎo)地位的時(shí)代,LED顯示屏以其高亮度、高清晰度和靈活性成為各類場(chǎng)景的寵兒。而LED視頻拼接處理器作為L(zhǎng)ED顯示系統(tǒng)的核心樞紐,對(duì)于實(shí)現(xiàn)震撼視覺效果、滿足多樣化應(yīng)用需求起著不可或缺

盛顯科技:拼接處理器連接大屏方法是什么?
拼接處理器作為大屏幕顯示系統(tǒng)的控制核心,負(fù)責(zé)將信號(hào)源的圖像精準(zhǔn)地按照用戶的要求傳送到輸出的大屏幕上,并通過系統(tǒng)中的控制服務(wù)器對(duì)整個(gè)顯示系統(tǒng)進(jìn)行高效管理。那么您知道拼接處理器連接大屏方法是什嗎?下面盛

盛顯科技:拼接處理器是什么設(shè)備類型
是什么設(shè)備類型嗎?下面盛顯科技小編為您介紹: ? 拼接處理器是一種專門用于視頻信號(hào)處理和顯示控制的硬件設(shè)備,它主要用于將多路視頻信號(hào)進(jìn)行分割、縮放、拼接和顯示控制。通過
AMS-MS4K_C:4K多畫面視頻拼接處理器,重塑視覺盛宴的新標(biāo)桿
在追求高清、大屏、多畫面的現(xiàn)代視覺展示領(lǐng)域,一款強(qiáng)大的視頻拼接處理器無疑是不可或缺的核心設(shè)備。AMS-MS4K_C系列4K輸入多畫面視頻拼接處理器,憑借其卓越的性能、靈活的功能和廣泛的
AMS-SC159:開啟LED視頻處理與拼接的新篇章
隨著LED顯示屏技術(shù)的飛速發(fā)展,其在商業(yè)展示、舞臺(tái)演出、體育賽事等領(lǐng)域的應(yīng)用愈發(fā)廣泛。在這個(gè)追求極致視覺效果的時(shí)代,一款能夠精準(zhǔn)控制、靈活拼接的LED視頻處理器顯得尤為重要。AMS-SC159,作為
盛顯科技:異形拼接處理器和傳統(tǒng)拼接處理器有什么區(qū)別?
現(xiàn)如今,隨著科技的不斷發(fā)展,拼接處理器已在眾多領(lǐng)域展現(xiàn)出其廣泛的適用性,尤其是異形拼接處理器,作為實(shí)現(xiàn)異形拼接屏功能的尖端設(shè)備,更是脫穎而出,它能夠巧妙地整合多個(gè)顯示屏,包括液晶顯示屏、LED顯示屏
盛顯科技:拼接處理器如何設(shè)置滿屏顯示?
在不少的用戶在使用拼接處理器的過程中,都很喜歡設(shè)置為滿屏顯示,這是因?yàn)闈M屏顯示能夠充分利用拼接屏的整個(gè)顯示區(qū)域,使得圖像或視頻內(nèi)容無縫覆蓋整個(gè)屏幕,從而增強(qiáng)觀眾的沉浸感和體驗(yàn)感。否則,非滿屏顯示

盛顯科技:在拼接處理器上配置混合矩陣的步驟是什么?
相信大家都知道,在拼接處理器上配置混合矩陣,主要涉及到將混合矩陣的輸出與拼接處理器的輸入相連接,并通過拼接處理器的軟件或界面進(jìn)行配置,以實(shí)現(xiàn)多屏顯示和視頻信號(hào)的靈活處理。在此過程中,了
盛顯科技:拼接處理器為什么要配置混合矩陣?
拼接處理器和混合矩陣作為視頻顯示與控制系統(tǒng)的關(guān)鍵組件,各自具有獨(dú)特的功能和優(yōu)勢(shì)。它們之間既存在區(qū)別又相互關(guān)聯(lián),共同為用戶提供了高效、靈活的視頻處理與顯示解決方案。在實(shí)際應(yīng)用中,我們通常會(huì)把兩者搭配
什么是液晶拼接屏?
液晶拼接屏是一種以液晶拼接單元作為顯示核心,在大屏幕拼接系統(tǒng)中可以將多個(gè)液晶拼接單元以特定的方式組合成一個(gè)超大尺寸的畫面,從而實(shí)現(xiàn)超大畫面拼接

請(qǐng)問對(duì)實(shí)時(shí)性要求較高要用STM32CubeMX嗎?
對(duì)實(shí)時(shí)性要求較高要用STM32CubeMX么?
發(fā)表于 04-24 06:18





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論