

針對存在非視距(non-line-of-sight, NLOS)的室內(nèi)定位算法進(jìn)行研究. 首先描述室內(nèi)定位中的常用技術(shù)和算法(航跡推算、指紋識別定位、鄰近探測、極點定位、三角定位、多邊定位、質(zhì)心定位), 概括其原理、優(yōu)缺點和適用場景; 其次, 通過仿真測試說明研究NLOS識別和抑制的必要性; 再次, 分別介紹NLOS識別和NLOS抑制的幾類算法, NLOS識別算法包括統(tǒng)計學(xué)方法、幾何關(guān)系法、機(jī)器學(xué)習(xí)法、信道特征提取法和虛點密度識別法, NLOS抑制算法包括模糊理論法、引入平衡參數(shù)法、幾何關(guān)系法、小波去噪法、機(jī)器學(xué)習(xí)類算法、凸優(yōu)化類算法、殘差類算法、最小二乘類算法和多維縮放類算法; 最后, 對全文進(jìn)行總結(jié)并指出NLOS室內(nèi)定位亟待解決的問題。
全球定位系統(tǒng)(global positioning system, GPS), 憑借其廣泛的應(yīng)用范圍和較高的定位精度, 受到了各方面專家和學(xué)者的青睞, 其在室外可以提供比較可靠的定位服務(wù). 然而, 由于室內(nèi)環(huán)境較為復(fù)雜, 信號的傳播過程中會遇到障礙物(行人、墻壁、桌椅等)的阻塞, 使得信號發(fā)生反射、折射或散射, 導(dǎo)致強(qiáng)度減弱, GPS并不能實現(xiàn)精確的定位, 即在存在非視距(non-line-of-sight, NLOS)的室內(nèi)環(huán)境中, 定位精度會有所下降. 如何有效識別和抑制NLOS, 從而提高定位精度是目前室內(nèi)定位研究的熱點問題之一. 室內(nèi)定位作為定位技術(shù)在室內(nèi)環(huán)境的延續(xù), 應(yīng)用更加廣泛. 精確的節(jié)點位置信息可以應(yīng)用在環(huán)境監(jiān)測、軍事偵察、定位打擊目標(biāo)、公共安全及應(yīng)急響應(yīng)等方面.
當(dāng)發(fā)生地震、火災(zāi)等意外災(zāi)害時, 室內(nèi)環(huán)境由于崩塌、火燒等會發(fā)生改變, 根據(jù)感覺盲目尋找很難快速找到被救援人員的位置. 而通過無人機(jī)等實地采集信息, 利用室內(nèi)定位技術(shù)可以快速進(jìn)行搜救, 既節(jié)省時間又能規(guī)劃出安全的救援路徑. 當(dāng)發(fā)生恐怖襲擊或者人質(zhì)劫持等社會安全事件時, 利用室內(nèi)定位技術(shù)可以快速確定襲擊者或人質(zhì)的位置. 反恐人員進(jìn)入室內(nèi)執(zhí)行任務(wù)時, 通過室內(nèi)協(xié)同定位算法進(jìn)行配合, 可以精確地獲得自己和同伴的位置, 對于任務(wù)的解決起到了更好的促進(jìn)作用. 當(dāng)處于火車站、高鐵站、飛機(jī)場或地下停車場時, 室內(nèi)定位技術(shù)可以為用戶提供導(dǎo)航定位、停車、找車服務(wù), 提高用戶的滿意度. 在商場或者倉庫可以幫助用戶快速找到心儀的商品, 增強(qiáng)用戶體驗感。
目前, 在室內(nèi)定位方面所使用的技術(shù)有很多, 包括地磁技術(shù)、Wi-Fi、藍(lán)牙、超聲波技術(shù)、激光技術(shù)、計算機(jī)視覺技術(shù)、超寬帶(ultra wide band, UWB)技術(shù)等。
地磁技術(shù)主要依據(jù)地磁場強(qiáng)度實現(xiàn)定位, 成本較低, 而且對環(huán)境的要求不高. Wi-Fi技術(shù)不受燈光、濕度、溫度等外界因素的影響,在一定頻段內(nèi)可以很好地穿越障礙,但在室內(nèi)極易受到多徑效應(yīng)的影響, 定位精度中等[2]. 低功耗藍(lán)牙具有功耗低、成本低、部署方便等優(yōu)點, 誤差可達(dá)到2 m左右。超聲波技術(shù)由固定的參考基礎(chǔ)設(shè)施和多種移動單元組成, 可以穿透部分固體和液體, 在黑暗、有毒等環(huán)境中仍可以應(yīng)用, 但其頻率受多普勒效應(yīng)的影響且成本較高. 激光技術(shù)可根據(jù)信號和反射信號的時間差值計算距離,結(jié)合角度信息完成相對定位,成本較高。
計算機(jī)視覺技術(shù)主要分為利用地標(biāo)包含的信息解算為矩陣實現(xiàn)定位和對數(shù)據(jù)庫內(nèi)存儲的相機(jī)位置信息進(jìn)行圖像指紋匹配實現(xiàn)定位兩種。伴隨計算機(jī)視覺技術(shù)的發(fā)展和成熟,使得基于視覺的用于同時定位與地圖構(gòu)建(simultaneous localization and mapping, SLAM)的技術(shù)可獲得圖形和視覺的支持。視覺SLAM技術(shù)包括前端和后端兩部分,前端又稱視覺里程計(visual odometry, VO),主要進(jìn)行特征檢測和數(shù)據(jù)關(guān)聯(lián)任務(wù);后端主要對前端的輸出結(jié)果進(jìn)行優(yōu)化,得到最優(yōu)的位姿估計和地圖。
由于較高的時空分辨率、良好的隱私保護(hù)、強(qiáng)穿透性以及高精度的定位性能,使得UWB技術(shù)能為室內(nèi)定位提供良好的解決方案。同時也為許多應(yīng)用程序提供了便利,如醫(yī)療監(jiān)控、安全和資產(chǎn)跟蹤等。
室內(nèi)定位中的常用算法包括航跡推算、指紋識別定位、鄰近探測、極點定位、三角定位、多邊定位和質(zhì)心定位等。下面主要介紹這些算法定位的原理以及優(yōu)缺點。
1.指紋識別定位
指紋識別定位算法主要由離線階段和在線階段兩部分構(gòu)成:在離線階段,用小網(wǎng)格劃分待定位區(qū)域,得到交點并記錄其坐標(biāo),對在交點處接收到的無線電信號提取特征(常用接收信號強(qiáng)度(received signal strength, RSS)),利用交點的坐標(biāo)和相應(yīng)的特征構(gòu)成的信息鏈建成指紋數(shù)據(jù)庫;在線階段,通過匹配算法對比實際信息提取的特征與指紋數(shù)據(jù)庫中的參數(shù)實現(xiàn)定位。
優(yōu)缺點:此算法自主性較高,有較高的定位精度;但在離線階段建立指紋庫工作量較大,且一旦更換定位場地,需要重新構(gòu)建指紋庫。
2.鄰近探測
鄰近探測法通過是否接收到物理信號來判斷目標(biāo)是否位于發(fā)射源四周,主要取決于信號的傳輸范圍。由圖 3可以看出,目標(biāo)節(jié)點位于基站B附近。
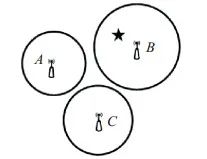
圖 3鄰近探測原理圖
3.極點定位
極點定位根據(jù)測量的相對錨節(jié)點的距離和角度信息推測出目標(biāo)的位置,其原理如圖 4所示.,若僅已知錨節(jié)點與目標(biāo)節(jié)點之間的距離d1d1,則可以初步確定目標(biāo)節(jié)點是在以錨節(jié)點為圓心、d1d1為半徑的圓上,然后通過角度信息可以得到目標(biāo)節(jié)點的精確位置。
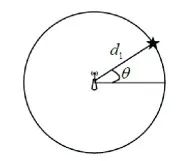
圖 4極點定位原理圖
優(yōu)缺點:只需要根據(jù)一個錨節(jié)點的位置即可進(jìn)行測量,應(yīng)用較為方便,常用于大地測量;但定位結(jié)果的準(zhǔn)確性易受測距和測量角度儀器的精度的影響。
審核編輯:劉清
-
機(jī)器視覺
+關(guān)注
關(guān)注
163文章
4463瀏覽量
121548 -
人工智能
+關(guān)注
關(guān)注
1801文章
48268瀏覽量
243612
發(fā)布評論請先 登錄
相關(guān)推薦
智慧化工園區(qū)高精度室內(nèi)定位解決方案
如何才能實現(xiàn)更精準(zhǔn)的室內(nèi)定位

室內(nèi)定位精確導(dǎo)航技術(shù)支持的技術(shù)手段有哪些
常見室內(nèi)定位技術(shù)詳解及其發(fā)展
如何應(yīng)對UWB室內(nèi)定位信號被遮擋

UWB標(biāo)簽在室內(nèi)定位中的優(yōu)勢
如何實現(xiàn)室內(nèi)精準(zhǔn)定位?分享室內(nèi)精準(zhǔn)定位技術(shù)及方法

無線室內(nèi)定位系統(tǒng)是通過什么技術(shù)實現(xiàn)的呢?

如何利用LoRa實現(xiàn)室內(nèi)定位?

室內(nèi)定位技術(shù)在智慧醫(yī)療物聯(lián)網(wǎng)的應(yīng)用

為什么UWB定位技術(shù)適用于室內(nèi)定位?
基于java+單體服務(wù) +?硬件(UWB定位基站、卡牌)技術(shù)架構(gòu)開發(fā)的UWB室內(nèi)定位系統(tǒng)源碼






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論