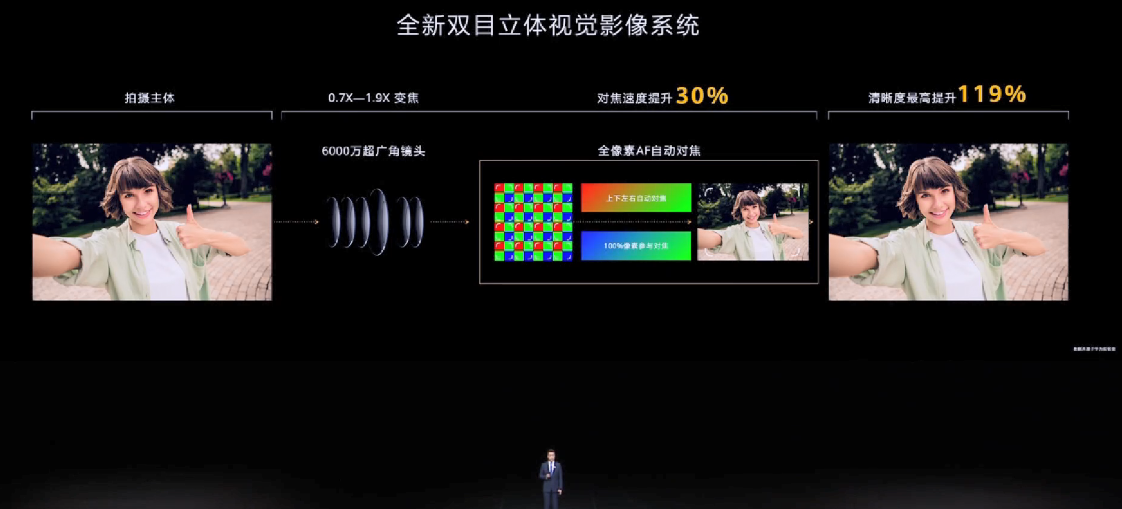
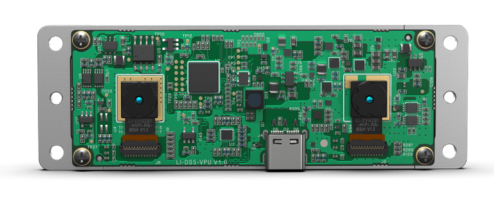
 華為nova10 Pro擁有全新雙目立體視覺影像系統 業界首發前置人像特寫鏡頭
華為nova10 Pro擁有全新雙目立體視覺影像系統 業界首發前置人像特寫鏡頭
華為nova10 Pro擁有全新雙目立體視覺影像系統 業界首發前置人像特寫鏡頭

審核編輯:彭靜
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
鏡頭
+關注
關注
2文章
506瀏覽量
25648 -
影像系統
+關注
關注
0文章
44瀏覽量
9092 -
華為nova
+關注
關注
0文章
226瀏覽量
15190
發布評論請先 登錄
相關推薦
華為nova 13系列發布:全新動態臻彩屏與影像升級
10月23日,華為在原生鴻蒙之夜暨全場景新品發布會上,正式推出了備受期待的新一代潮流新機——華為nova 13系列。這款新機在屏幕、機身設計以及影像
OPPO Find X8 Pro雙潛望鏡頭引領影像新風尚
近日,OPPO Find X8系列再度迎來預熱高潮,萬眾矚目的新品將于明日震撼發布。官方今日正式宣布,OPPO Find X8 Pro將搭載行業唯一的雙潛望鏡頭系統,這一創新設計無疑為影像
立體視覺新手必看:英特爾? 實感? D421深度相機模組
英特爾首款一體化立體深度模組,旨在將先進的深度感應技術帶給更廣泛的受眾 2024年9月24日?—— 英特爾? 實感? 技術再次突破界限,推出全新的英特爾? 實感? 深度相機模組D421。這是一款
vivo S19 Pro驚艷登場,搭載天璣9200+旗艦芯
為讓每一張人像攝影呈現動人故事感,新發布的 vivo S19 Pro 配備全焦段人像,覆蓋 24mm、35mm、50mm、85mm、100mm 五大黃金人像焦段,無論是風光、敘事
PROPHESEE 攜手 AMD,推出業界首款兼容 Kria? KV260 視覺 AI 入門套件的事件視覺解決方案
套件(AMD Kria? KV260 Vision AI Starter Kit),兩者的強強聯合將加速高級邊緣機器視覺應用的開發。同時,此次合作也標志著業界首款兼容 AMD 平臺的事件視覺開
發表于 05-30 10:41
?969次閱讀

業界首款柔性算力新物種,當屬華為云新上市的云耀 X 實例
),以其業界首創的柔性算力技術和雙倍性能提升,引領著云服務的未來發展方向。本文將揭秘云耀 X 實例的創新之處、用戶痛點解決方案以及核心技術亮點,帶您深入了解這一引領變革的新物種。 全新技術突破,柔性算力新物種 云計算領域的發展

新品 | Bumblebee X系列用于高精度機器人應用的新型立體視覺產品
TeledyneFLIRIIS推出一款用于高精度機器人應用的新型立體視覺產品BumblebeeX系列。BumblebeeX產品圖BumblebeeX系列,一個基于一流立體視覺產品組合的

奧比中光正式發布全新Gemini 330系列雙目3D相機
4月29日,奧比中光正式發布全新Gemini 330系列雙目3D相機,首發產品包括Gemini 335、Gemini 335L兩款通用型高性能雙目3D相機。

業界首款音質獲得雙金標認證的頸戴耳機,華為FreeLace Pro 2即將發售
4月3日,華為推出全新華為FreeLace Pro 2頸戴耳機。搭載超磁感澎湃單元,配合雙高清音頻編解碼,帶來高解析音質,成為業界首款獲得HWA 及Hi-Res Audio Wirel
銀牛微電子3D視覺感知方案賦能小米CyberDog系列仿生四足機器人
2024年3月21日,合肥銀牛微電子宣布小米CyberDog系列仿生四足機器人的AI多模態融合感知決策系統正式采用銀牛的雙目立體視覺產品解決方案。
瑞薩電子發布業界首款基于Cortex-M85處理器的全新超高性能MCU
去年10月,瑞薩電子重磅發布了業界首款基于Cortex-M85處理器的全新超高性能MCU:RA8M1系列微處理器。 今年,瑞薩將舉辦RA8巡回技術研討會。

佳能發布VR鏡頭,便捷拍攝VR影像
在此次展覽中,佳能展出了一系列 VR 鏡頭產品。其中一款基于雙魚眼鏡頭設計的鏡頭,通過利用兩個鏡頭的視差實現立體圖像捕捉技術。經由 VR 終
總投資1.5億!蘇州清研微視立體視覺傳感器項目落戶安徽蕪湖
2月1日,清研年產3萬臺立體視覺傳感器項目簽約落戶安徽蕪湖三山經濟開發區。項目計劃總投資15000萬元,建設年產3萬臺立體視覺傳感器(產業創新融合產品)。該項目的落地加強了三山經開區與清華大學未來在

最強人像再封神!Find X7 系列首發全新哈蘇回眸人像
即將在1月8日發布的封神旗艦 Find X7 系列公布了全新的哈蘇大師影像特性。Find X7系列將首次支持哈蘇回眸人像能力,第一次為手機的人像模式帶來捕捉動態的能力,可以清晰捕捉動感
發表于 01-05 10:29
?380次閱讀

三維視覺測量技術:被動視覺測量和主動視覺測量
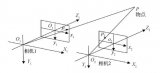
與人眼的立體感知類似,雙目立體視覺用兩個相機從不同的角度對被測物體成像。依據兩幅圖像中對應點的立體視差( stereo disparity) ,根據三角測量原理實現三維信息測量。





 工商網監
工商網監
評論