") 三角測距是什么意思?三角測距原理圖解
三角測距是什么意思?三角測距原理圖解
三角測距是什么意思?三角測距原理圖解
三角測距是什么意思?
三角測距法是一種低成本的激光雷達(dá)測距方案,三角測距是利用激光這把尺子,根據(jù)各種參數(shù)設(shè)定和距離分辨率;以及測量策略的不同,來測定距離。
三角測距原理
用一束激光以一定的入射度度照射被測物體,激光在物體表面發(fā)生反射和散射,在另一角度利用透鏡對反射激光匯聚成像,光斑成像在CCD位置傳感器上,當(dāng)被測物體沿激光方向發(fā)生移動時,位置傳感器上的光斑將產(chǎn)生移動,其位移大小對應(yīng)被 測物體的移動距離,因此可通過算法設(shè)計,由光斑位置距離計算出被測物體與基線的距離值。由于入射光和反射光構(gòu)成一個三角形,對光斑位置的計算運(yùn)用了幾何三角定理,故該測量法稱為激光三角測距法。
激光雷達(dá)四大核心組件
激光雷達(dá)主要由激光器、接收器、信號處理單元和旋轉(zhuǎn)機(jī)構(gòu)這四大核心組件構(gòu)成。
激光器:激光器是激光雷達(dá)中的激光發(fā)射機(jī)構(gòu)。在工作過程中,它會以脈沖的方式點(diǎn)亮。
接收器:激光器發(fā)射的激光照射到障礙物以后,通過障礙物的反射,反射光線會經(jīng)由鏡頭組匯聚到接收器上。
信號處理單元:信號處理單元負(fù)責(zé)控制激光器的發(fā)射,以及接收器收到的信號的處理。根據(jù)這些信息計算出目標(biāo)物體的距離信息。
旋轉(zhuǎn)機(jī)構(gòu):以上3個組件構(gòu)成了測量的核心部件。旋轉(zhuǎn)機(jī)構(gòu)負(fù)責(zé)將上述核心部件以穩(wěn)定的轉(zhuǎn)速旋轉(zhuǎn)起來,從而實(shí)現(xiàn)對所在平面的掃描,并產(chǎn)生實(shí)時的平面圖信息。
三角測距原理圖解
按入射光束與被測物體表面法線的角度關(guān)系,激光三角測距法可分為斜射式和直射式兩種。
1、直射式激光三角測距法
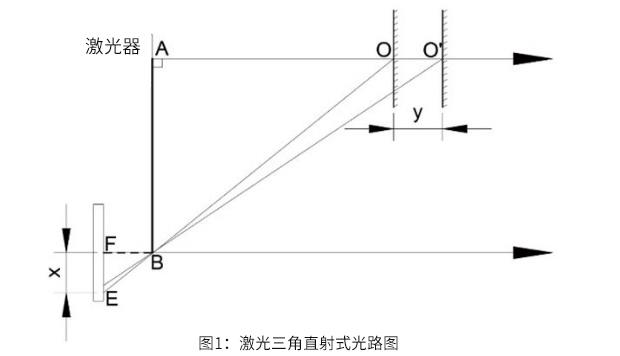
如圖1所示,當(dāng)激光光束垂直入射被測物體表面,即入射光線與被測物體表面法線共線時,為直射式激光三角法。
2、斜射式激光三角測距法
當(dāng)光路系統(tǒng)中,激光入射光束與被測物體表面法線夾角小于90°時,該入射方式即為斜射式。如圖2所示的光路圖為激光三角法斜射式光路圖。
由激光器發(fā)射的激光與物體表面法線成一定角度入射到被測物體表面,反(散)射光經(jīng)B處的透鏡匯聚成像,最后被光敏單元采集。
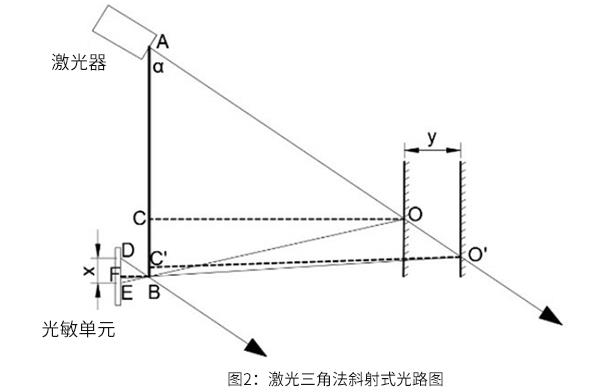
由圖2可知入射光AO與基線AB的夾角為α,AB為激光器中心與CCD中心的距離,BF為透鏡的焦距f,D為被測物體距離基線無窮遠(yuǎn)處時反射光線在光敏單元上成像的極限位置。DE為光斑在光敏單元上偏離極限位置的位移,記為x。當(dāng)系統(tǒng)的光路確定后,α、AB與f均為已知參數(shù)。由光路圖中的幾何關(guān)系可知△ABO∽△DEB,則有邊長關(guān)系:
則易知
在確定系統(tǒng)的光路時,可將CCD位置傳感器的一個軸與基線AB平行(假設(shè)為y軸),則由通過算法得到的激光光點(diǎn)像素坐標(biāo)為(Px,Py)可得到x的值為:
其中CellSize是光敏單元上單個像素的尺寸,DeviationValue是通過像素點(diǎn)計算的投影距離和實(shí)際投影距離x的偏差量。當(dāng)被測物體與基線AB產(chǎn)生相對位移時,x改變?yōu)閤,由以上條件可得被測物體運(yùn)動距離y為:
-
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
3990瀏覽量
190078 -
三角測距
+關(guān)注
關(guān)注
0文章
19瀏覽量
750
發(fā)布評論請先 登錄
相關(guān)推薦

淺談電動機(jī)三角接法是什么意思?舉例分析
三相電機(jī)三角形連接有哪些參數(shù)關(guān)系?
什么是三相電機(jī)三角形接法?定義是什么?
TI Arm內(nèi)核三角函數(shù)的優(yōu)化

三角波發(fā)生器的組成和應(yīng)用
三角形連接和星形連接的基本概念和特點(diǎn)
三相負(fù)載與三角聯(lián)結(jié)的關(guān)系
三角形連接線電流和相電流的關(guān)系
激光焊接機(jī)在不銹鋼三角閥制造中的應(yīng)用與發(fā)展






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論