

蘋果公司近期正式推出了新款iPad Pro,吸引了不少人的關注。在官方的宣傳標語中,有一句話尤其引人關注,“它的Pro級攝像頭打通了真實和虛擬的交界”。
新款iPad Pro搭載的Pro級攝像頭不僅包含了全新的超廣角攝像頭,還包含了一款激光雷達掃描儀。該掃描儀利用dToF技術,結合運動傳感器和iPadOS內的架構,可以進行深度測量,為增強現實及更廣泛的領域開啟無盡可能。
那么dToF是什么呢,它和我們之前市面上已有的iToF又有什么不同呢?
本文將會介紹dToF和iToF的成像原理,對比分析dToF和iToF兩者的差異性,帶領大家了解一下ToF領域。
一.TOF
首先,讓我們先來了解一下ToF的基本概念。
Time-of-Flight(ToF),顧名思義,是一種利用光飛行時間的技術。接觸過3D視覺的讀者應該知道,ToF和結構光、雙目立體視覺是近年來三種主流的3D成像方式。ToF向場景中發射近紅外光,利用光的飛行時間信息,測量場景中物體的距離。ToF相比較另外兩種3D成像方式,深度信息計算量小,抗干擾性強,測量范圍遠。種種優勢推動了ToF在機器人、交互以及其他工業領域中的應用。尤其是在移動端,已有多品牌手機,比如華為、OPPO、蘋果,將其用于手機后置攝像。
二.dTOF和iTOF
了解了ToF的概念之后,讓我們再來深入了解一下兩類ToF的基本成像原理,也就是文章標題中提到的iToF和dToF。
dToF,全稱是direct Time-of-Flight。顧名思義,dToF直接測量飛行時間。dToF核心組件包含VCSEL、單光子雪崩二極管SPAD和時間數字轉換器TDC。Single Photon Avalanche Diode(SPAD)是一種具有單光子探測能力的光電探測雪崩二極管,只要有微弱的光信號就能產生電流。dToF模組的VCSEL向場景中發射脈沖波,SPAD接收從目標物體反射回來的脈沖波。Time Digital Converter(TDC)能夠記錄每次接收到的光信號的飛行時間,也就是發射脈沖和接收脈沖之間的時間間隔。dToF會在單幀測量時間內發射和接收N次光信號,然后對記錄的N次飛行時間做直方圖統計,其中出現頻率最高的飛行時間t用來計算待測物體的深度。
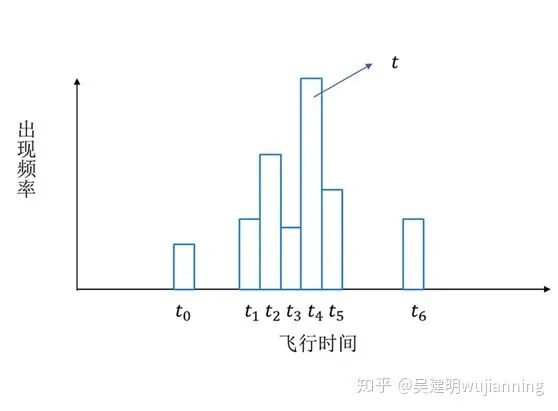
圖1是dToF單個像素點記錄的光飛行時間直方圖,其中,高度最高的柱對應的時間就是該像素點的最終光飛行時間。
dToF的原理看起來雖然很簡單,但是實際能達到較高的精度很困難。除了對時鐘同步有非常高的精度要求以外,還對脈沖信號的精度有很高的要求。普通的光電二極管難以滿足這樣的需求。而dToF中的核心組件SPAD由于制作工藝復雜,能勝任生產任務的廠家并不多,并且集成困難。所以目前研究dToF的廠家并不多,更多的是在研究和推動iToF。
iToF的概念和dToF相對應,全稱是indirect Time-of-Flight,直譯就是間接光飛行時間。所謂間接,就是指iToF是通過測量相位偏移來間接測量光的飛行時間,而不是直接測量光飛行時間。
iToF向場景中發射調制后的紅外光信號,再由傳感器接收場景中待測物體反射回來的光信號,根據曝光(積分)時間內的累計電荷計算發射信號和接收信號之間的相位差,從而獲取目標物體的深度。如圖2所示。
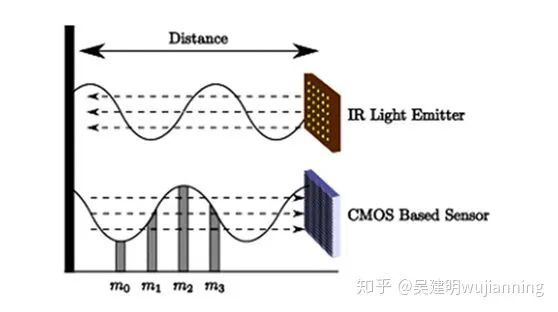
圖2. iToF成像原理示意圖[1]
iToF模組的核心組件包含VCSEL和圖像傳感器。VCSEL發射特定頻率的調制紅外光。圖像傳感器在曝光(積分)時間內接收反射光并進行光電轉換。曝光(積分)結束后將數據讀出,經過一個模擬數字轉換器再傳給計算單元,最終由計算單元計算每個像素的相位偏移。iToF計算深度的方式通常是采用4-sampling-bucket算法,利用4個相位延遲為0°,90°,180°和270°的采樣信號計算深度。如圖3所示
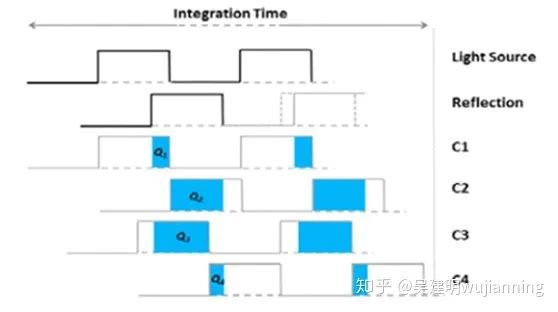
圖3. 連續波調制方式測相位偏移原理示意圖[2]

三.性能對比
dToF和iToF雖然都是利用光飛行時間技術,但是兩者在測距原理和硬件實現上都有差異。軟硬件的差異會導致這兩類ToF在各方面的性能表現上各有千秋。
衡量ToF的性能指標,需要考慮幾個方面。因為ToF是一個可以測距的相機,作為一個測距設備,基本的評價指標有測距精度和有效探測距離。其次,作為相機而言,圖像分辨率也是一個重要的評價指標。此外,由于ToF本身只能提供3D信息,它將來更多的發展是集成到3D相關的應用,比如3D建模、AR以及移動平臺。在集成到其他3D相關的應用時,尤其是移動端和機器人平臺,必須要考慮它的能耗和成本,以及在各種復雜場景下的抗干擾能力。以上的這些特性,決定了dToF和iToF有著各自適用的應用場景。
接下來,本文會從精度、有效探測距離、圖像分辨率、能耗、成本、抗干擾等7個方面,對比iToF和dToF的優劣。
精度
總的來說,目前的iToF深度精度在 cm 級,并且隨著測量距離的增大,反射光的強度減小,相位測量的信噪比減小,絕對誤差也會隨之增大。
有效探測距離
有效探測距離指相機能夠輸出可靠深度的距離范圍,可靠深度意味著該深度值和真實值的誤差小于一定閾值。舉個簡單的例子,假設測量誤差在2cm以內時,我們視作該深度值是可靠的。如果一個ToF模組測量5米的物體時,測量值是5.02米,誤差剛好達到了預先定義的極限。當物體位于5.01米時,測量值是5.22米,誤差超出了2cm。我們就可以說該ToF模組的有效探測距離是5米。
當然,限制ToF的有效探測距離的主要因素之一是相位模糊現象。
對于dToF而言,當測量距離較遠時,光飛行一個來回的時間超過了兩次連續發射脈沖的間隔,傳感器在發射第二個測量信號后,才接收到第一個測量信號的反射波,就會把該反射波錯認為是第二個測量信號的近距離反射波,這時就會出現相位模糊現象。如圖4所示。圖4中case1表示的是近距離場景下dToF的測距原理圖,case2表示的是遠距離場景下,發生相位模糊現象的測距原理圖。
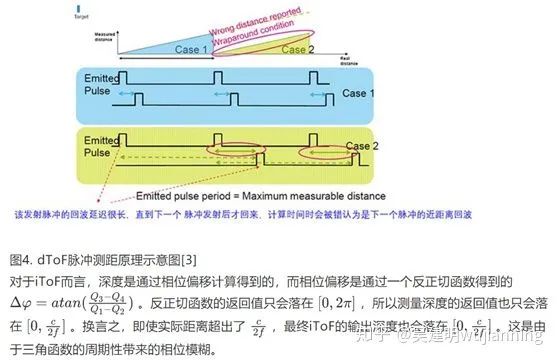
§ dToF會受到測量頻率(相鄰兩次測量的間隔時間)限制,iToF的有效探測距離會受到調制光的頻率限制。dToF在測量遠距離物體時,可以適當增加兩次測量之間的間隔,減少測量次數。但是,減少測量次數會同時降低測量精度,相當于是用精度換取有效探測距離。而iToF也可以通過降低調制光的頻率,從而犧牲一定的測量精度以獲得更遠的有效探測距離。
對于iToF而言,可以利用雙頻解決相位模糊現象。利用兩個不同頻率的測量數據去求解相位模糊度,從而恢復正確深度值。借助雙頻測量可以同時實現高精度測量和高有效探測距離。
能耗
從發射信號來看, dToF則采用 級的脈沖激光,iToF目前大多采用連續波調制。相比較而言,脈沖波能夠達到超低占空比,所以功耗也較低。
從光照模式來看,由于dToF的測量精度不會隨著測量距離的增大而降低,所以功耗也會相對較低。反之,iToF目前采用的大多是面光發射方式。并且,隨著測量距離的增大,iToF需要提高光照功率或者延長曝光時間來獲取更高的精度,所需的功耗也會大幅增加。
成本
dToF采用的是數字電路架構,不需要模數轉換。iToF采用的是模擬電路結構,需要模數轉換芯片。
對于整體的硬件架構而言,dToF的核心組件SPAD的制作工藝復雜,現有的資源少。iToF沒有這方面的顧慮。
在系統集成方面, dToF還需要額外的時間處理電路,系統集成難度較高。iToF的系統集成容易,不需要額外的測量電路。
抗環境干擾
環境干擾包括場景中環境光干擾、多路徑反射光干擾以及不同表面灰度等影響。這一類環境干擾發生在外界,和ToF本身的關系不大,環境干擾的差異主要是由不同ToF的測距原理引起的。
dToF單幀深度圖獲取時,會經歷多次重復測量,并且采用時間直方圖統計的方式計算飛行時間,比較容易區分信號中的干擾成分。抗環境干擾能力更強。
iToF在曝光階段,部分環境光混雜在調制光中被傳感器接收,然后計算相位偏移。無法從單次測量的結果中區分出環境光引起的干擾。環境光越強,相應的,引起的深度誤差也越大。
應用場景
dToF功耗低,并且體積小巧,更加適合工業機器人等需快速進行測距避障檢測的應用,以及其他在空間受限的緊湊型設計中。
dToF抗環境干擾表現比較好,目前在戶外場景下的測距精度比iToF更加高,在戶外應用場景中也比較占優。
dToF的時間分辨率高,測量距離增大時精度不會大幅衰減,能耗也不會大幅提升,在AR應用中的優勢也比較顯著。
iToF的圖像分辨率較高,在物體識別,3D重建以及行為分析等應用場景中能夠重現場景中更多的細節信息,在機器人、新零售等應用領域占優。
dToF和iToF兩者的目標都是輸出一幅高質量的深度圖像,所以兩者都需要深度數據層面的濾波和噪聲修正,比如空域濾波、點云域的噪聲濾波以及非一致性像素校準等。此外,兩者都擁有透鏡成像系統,所以無論是dToF還是iToF,都需要透鏡失真補償。硬件的溫度變化帶來的噪聲也同時存在于兩種ToF中,所以溫度補償也是兩者所必需的。
dToF是發射脈沖波,而不是特定頻率的調制波,所以dToF不需要做和調制光的頻率相關的處理,包括頻率校準、自動頻率選擇、高動態范圍(HDR)。但是dToF的發射脈沖也有一定的頻率,即相鄰兩個發射脈沖之間的時間間隔,dToF的頻率校準和發射脈沖的頻率相關。dToF僅僅輸出深度圖,而iToF同時輸出深度圖和幅值圖,所以dToF不需要做幅值校準。
此外,由場景干擾引起的多徑、相位模糊、運動模糊、內反射等都是兩者所共有的問題,雖然dToF因為成像原理的特性具有更好的抗環境干擾能力,但是還是會受到這一類場景干擾的影響。不過不同的是,因為dToF和iToF的成像原理不同,兩者所需要的深度修正方式也會有所差異。
dToF和iToF兩者因為測距原理和硬件架構的不同,各方面的性能互有優劣,適用場景也不盡相同。兩者均面臨場景的適應性,如何在任意場景下獲取可靠和準確的深度數據是非常大的技術挑戰,是ToF技術普及的關鍵。ToF應用技術的普及有賴于3D ISP增強引擎來消除干擾,降低功耗,提高實時性能;需要面向3D行業的ISP IP及中間件,有力支撐上層應用。所以說3D ISP是3D成像市場爆發的必要條件。數跡智能團隊正在研發3D ToF ISP Smart3D-ISP,以ISP技術為核心系統性地提升無論是dToF還是iToF的性能并降低功耗和成本是多年來的研發目標,將我們的3D ToF技術植入每部手機、每輛汽車、每個機器人、每臺家電,從而改變機器對世界的“看法”,實現深度的智能。
審核編輯 :李倩
-
轉換器
+關注
關注
27文章
8884瀏覽量
150064 -
TOF
+關注
關注
9文章
493瀏覽量
36969 -
3D視覺
+關注
關注
4文章
444瀏覽量
27939
原文標題:dToF與iToF技術解析
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
X射線成像系統:Kirkpatrick-Baez鏡和單光柵干涉儀
瑞盟dTOF激光測距技術全鏈路解決方案
Hyperlux ID AF013X#業界首款實時 iToF 傳感器
安森美推出首款飛行時間傳感器HyperluxID系列
智能光學計算成像技術與應用
DLP9000在樣機中正常成像的DMD,忽然無法正常清晰成像,是什么原因?
美芯晟DTOF傳感器:賦能AloT+低空全場景應用
美芯晟DTOF傳感器賦能AloT+低空全場景落地

重磅新品 | 美芯晟發布全集成直接飛行時間(dToF)傳感器MT3801

什么是偏振成像?
成像器件的工作原理是什么
成像距離和焦距關系是什么
什么是散射成像技術?
XL5300 dTOF測距模塊簡單介紹,加鏡頭后可達7.6米測距距離,±4%測距精度
紅外熱成像VOCs泄漏成像檢測






 工商網監
工商網監

評論