") 如何利用ESP8266制作一個(gè)簡(jiǎn)單的四軸飛行器
如何利用ESP8266制作一個(gè)簡(jiǎn)單的四軸飛行器
這個(gè)項(xiàng)目里我將向您展示如何使用ESP8266(12e)制作四軸飛行器,我們使用ESP8266作為飛行控制器。并且據(jù)說(shuō)這架無(wú)人機(jī)可以爬墻,你是不是很震驚?開(kāi)玩笑的,讓我們繼續(xù)往下看吧!
飛控
飛行控制器(FC)是四軸飛行器的大腦。它基本上是一個(gè)集成電路板,包括檢測(cè)方向變化的傳感器。它還接收用戶(hù)命令并控制電機(jī)以使四軸飛行器保持在空中。市場(chǎng)上有許多飛行控制板。其中有些是開(kāi)源的,有些不是。
Esp8266四軸飛行器的耗材
所需組件:
Esp8266
MPU6050加速/陀螺模塊
有刷電機(jī)
螺旋槳
500mAhlipo3.7v
Si2302MOSFET(5x)
鉛筆
無(wú)人機(jī)套件(可選)
使用的工具:
烙鐵
飛控
如同我們知道大腦是如何工作的,我們就會(huì)知道如何處理它。在這里,您有飛行控制器(FC)的部件。
飛行控制器(FC)是四軸飛行器的大腦。它基本上是一個(gè)集成電路板,包括檢測(cè)方向變化的傳感器。它還接收用戶(hù)命令并控制電機(jī)以使四軸飛行器保持在空中。
幾乎所有的飛行控制器(FC)都包括基本的陀螺儀和加速度計(jì)(Gyro和Acc)傳感器。一些FC可能包括更高級(jí)的傳感器,例如氣壓計(jì)和磁力計(jì)(指南針)。
在這里,我使用ESP8266和MPU6050陀螺儀和加速度計(jì)(陀螺儀和加速度計(jì))傳感器制作了自己的飛行控制器。
ESP8266是什么?
基本上,ESP8266是一個(gè)Wi-Fi模塊。它具有2.4GHzWi-Fi的能力,即802.11b/g/n。它支持WPA和WPA2。它是一個(gè)集成了32位處理器的片上系統(tǒng),運(yùn)行頻率為80MHz(也可以超頻至160MHz)。它有64KB的RAM和64KB的引導(dǎo)ROM。
為什么我們使用ESP8266?
ESP8266模塊使微控制器能夠連接到2.4GHzWi-Fi
ESP8266功能
ESP8266在物聯(lián)網(wǎng)方面有很多應(yīng)用。以下是該芯片的部分功能:
網(wǎng)絡(luò):模塊的Wi-Fi天線使嵌入式設(shè)備能夠連接到路由器并傳輸數(shù)據(jù)
數(shù)據(jù)處理:包括處理來(lái)自模擬和數(shù)字傳感器的基本輸入,以便使用RTOS或非OSSDK進(jìn)行更復(fù)雜的計(jì)算
P2P連接:使用IoTP2P連接在ESP和其他設(shè)備之間創(chuàng)建直接通信
Web服務(wù)器:訪問(wèn)以HTML或開(kāi)發(fā)語(yǔ)言編寫(xiě)的頁(yè)面。
ESP8266作為一個(gè)微控制器:
低功耗、高度集成的Wi-Fi解決方案
最少7個(gè)外部組件
寬溫度范圍:-40°C至+125°C
ESP8285—8Mbit閃存嵌入
無(wú)線電發(fā)射器和接收器以及偏航、俯仰、滾動(dòng)

無(wú)線電發(fā)射器向接收器發(fā)送信號(hào),接收器接收到這個(gè)信號(hào)并根據(jù)來(lái)自發(fā)射器的命令進(jìn)行操作。
無(wú)線電控制器通常由發(fā)射器和接收器組成,它們通常在不需要低功率發(fā)射器許可的無(wú)線電頻率上運(yùn)行。
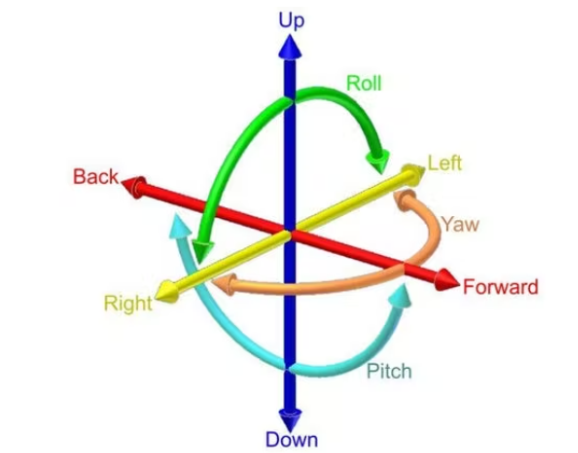
偏航、俯仰、滾動(dòng)
無(wú)線電發(fā)射器向接收器發(fā)送信號(hào)。接收器接收到這個(gè)信號(hào)并根據(jù)來(lái)自發(fā)射器的命令進(jìn)行操作。
無(wú)線電控制器通常由發(fā)射器和接收器組成,它們通常在不需要低功率發(fā)射器許可的無(wú)線電頻率上運(yùn)行
偏航、俯仰、滾動(dòng)
在空中向左或向右移動(dòng)您的無(wú)人機(jī),實(shí)際上是“滾動(dòng)”您的無(wú)人機(jī)。
向前或向后傾斜您的無(wú)人機(jī)。
順時(shí)針或逆時(shí)針旋轉(zhuǎn)你的無(wú)人機(jī),讓你在空中畫(huà)圈或圖案。
控制發(fā)送到無(wú)人機(jī)的電量,從而使無(wú)人機(jī)更快或更慢。
在空中向左或向右移動(dòng)您的無(wú)人機(jī),實(shí)際上是“滾動(dòng)”您的無(wú)人機(jī)。
向前或向后傾斜您的無(wú)人機(jī)。
順時(shí)針或逆時(shí)針旋轉(zhuǎn)你的無(wú)人機(jī),讓你在空中畫(huà)圈或圖案。
控制發(fā)送到無(wú)人機(jī)的電量,從而使無(wú)人機(jī)更快或更慢。
原理圖
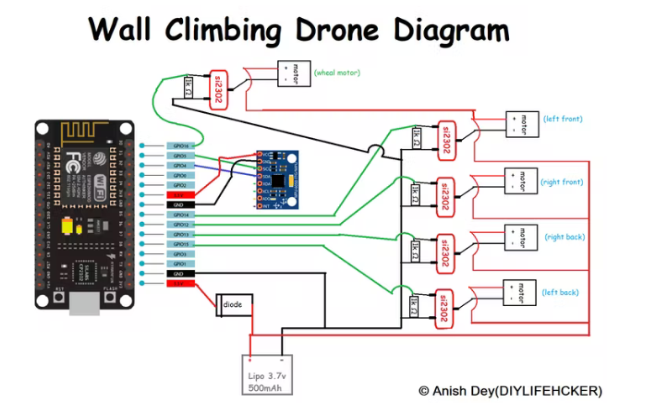
這是這個(gè)無(wú)人機(jī)的示意圖
接線圖非常簡(jiǎn)單
您必須按照原理圖將MPU6050模塊引腳與Esp8266引腳連接起來(lái),示意圖如上所示。
制作電路
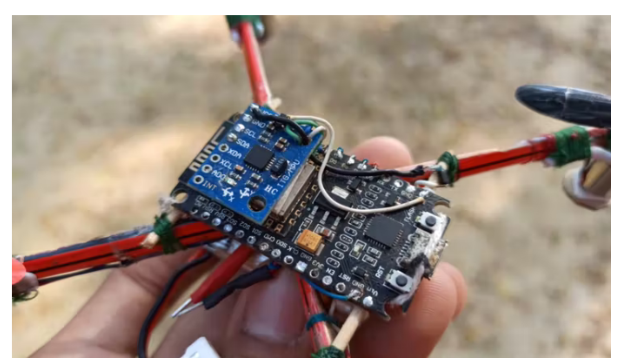
按照上圖給出的示意圖制作電路。
軟件部分
如何安裝Arduino桌面IDE?
在ArduinoSoftware下載ArduinoDesktopIDE
選擇您的操作系統(tǒng)(Windows7、Windows10、Linux64位等)
單擊“僅下載”并按照給出的說(shuō)明進(jìn)行操作
如果您沒(méi)有管理員權(quán)限,請(qǐng)下載“用于非管理員安裝的WindowsZIP文件”并將其解壓縮到所需位置。
啟動(dòng)ArduinoDesktopIDE(如果它沒(méi)有自動(dòng)啟動(dòng)或者您沒(méi)有找到ArduinoIDE快捷方式,請(qǐng)單擊arduino.exe)
安裝對(duì)ESP8266的支持
選擇“文件-》首選項(xiàng)”
添加http://arduino.esp8266.com/stable/package_esp8266.。。到“AdditionalBoardsManagerURLs”
點(diǎn)擊“確定”
安裝ESP8266WiFi.h庫(kù)
復(fù)制代碼并將您自己的wifiSSID和密碼放入代碼中
轉(zhuǎn)到“爬墻無(wú)人機(jī)”并下載代碼。
更改ssid或通過(guò):WiFi.begin(“Diyprojectslab”,“romeooo”);//Changessidandpassword
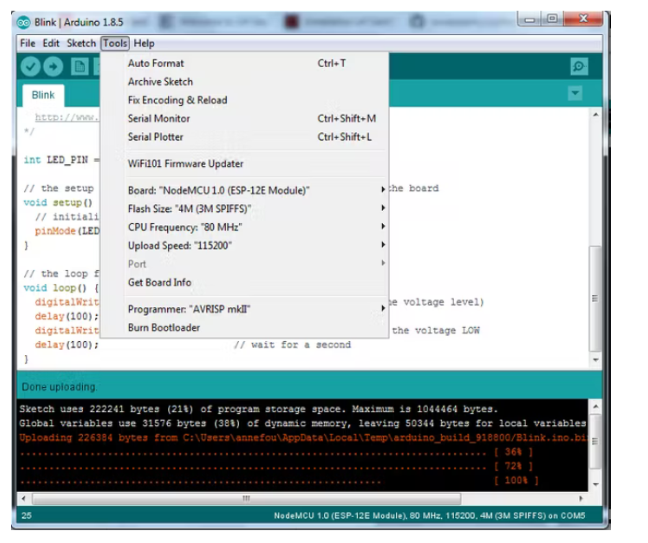
在ArduinoIDE中打開(kāi)提供的草圖
更新Esp826drone.ino文件中的WiFi憑據(jù)
將其上傳到您的ESP8266
組裝你的無(wú)人機(jī)

安裝所有電機(jī)

發(fā)動(dòng)機(jī)
兩臺(tái)電機(jī)順時(shí)針旋轉(zhuǎn),兩臺(tái)電機(jī)逆時(shí)針旋轉(zhuǎn)(見(jiàn)圖),如果電機(jī)不向正確方向旋轉(zhuǎn),只需切換電機(jī)的極性
檢查電池和電壓
檢查所有螺旋槳是否連接牢固
檢查所有電機(jī)安裝
檢查所有電機(jī)安裝
飛行后務(wù)必拔掉電池,只在飛行前幾秒鐘裝上電池

接下來(lái),您只需要
下載應(yīng)用程序
并安裝應(yīng)用程序
啟動(dòng)你的ESP8266
連接到應(yīng)用程序
現(xiàn)在,小心的把你的手指放在那兩個(gè)操縱桿上
飛(成果)

最終如你所見(jiàn),這是一個(gè)非常簡(jiǎn)單的飛行控制器。
-
四軸飛行器
+關(guān)注
關(guān)注
55文章
206瀏覽量
51162 -
飛行控制器
+關(guān)注
關(guān)注
1文章
26瀏覽量
10392 -
ESP8266
+關(guān)注
關(guān)注
50文章
962瀏覽量
45109
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
【MiCOKit申請(qǐng)】四軸飛行器的原理與制作
【云智易申請(qǐng)】四軸飛行器的原理與制作
【OK210申請(qǐng)】四軸飛行器的原理與制作
如何學(xué)習(xí)制作四軸飛行器
四軸飛行器畢業(yè)設(shè)計(jì)_四軸飛行器源代碼_四軸飛行器制作教程






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論